
手持式绿篱修剪机设计方案的选择和试验
2020-11-06 05:55杨天兴祁富燕王振禄王陇临水清皎
农业与技术 2020年19期
杨天兴 祁富燕 王振禄 王陇临 水清皎

摘 要:为了从绿篱修剪机设计的众多方案中选择出最佳方案,采用模糊评价的方法对4个备选方案进行隶属度函数的计算,最终完成了方案的评价和选择。试验证明,模糊评价能够为手持电动绿篱修剪机的设计方案选择和科学决策提供参考。
关键词:绿篱修剪机;设计方案;模糊评价;试验
中图分类号:S776.24 文献标识码:A DOI:10.19754/j.nyyjs.20201015016
引言
绿篱是现代化生活中企事业单位、生活小区和绿化带不可或缺的造景和绿化手法。本文以机械设计方法学相关内容为指导,对手持式电动绿篱修剪机的结构设计进行定量与定性的分析。同时,运用模糊综合评价法,对不同方案进行评价,对各设计方案进行优劣排序,从而选出手持式电动绿篱修剪机的最优设计方案[3-6]。
1 修剪机总功能的描述及分解
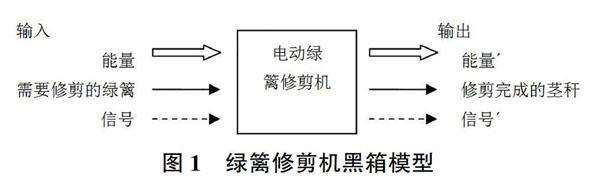
设计的手持式电动绿篱修剪机要求将绿篱按照成型要求把多余的茎秆剪去,割茬均匀、整齐,无撕裂,操作简单,使用安全可靠。总功能描述为“修剪绿篱多余的茎秆”。
利用“黑箱法”完成修剪机功能分析,如图1所示。
对于比较复杂的技术系统可利用系统工程的分解性原理和功能树的方式将功能系统按总功能、分功能等功能元进行分解,化繁为简,以便通过各功能元解的有机组合求得技术系统解[7]。修剪机总功能为修剪茎秆,可分解为能量转换、控制方式、剪切茎秆,剪切茎秆功能分为切割方式及切割运动变换。
2 功能结构的建立及方案的形态学矩阵
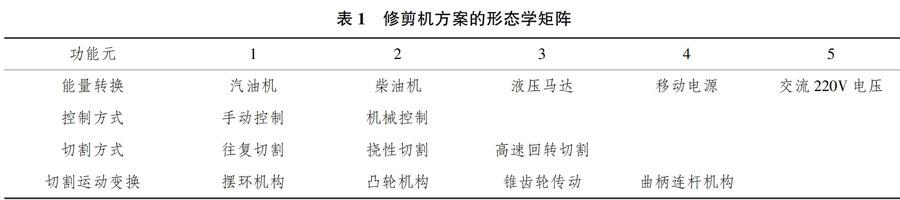
绿篱修剪机的总功能分解为能量转换、控制方式、切割方式及切割运动变换4个功能元。根据功能元的性质寻找实现的工作原理,再从工作原理找到功能载体即可获得功能元的解。将获得的各功能元的解列入以功能元为纵坐标,功能元的解为横坐标的形态学矩阵中,如表1所示。
根据表1修剪机方案的形态学矩阵得出整体方案,从理论上可以计算出:
S=5×2×3×4=120
根据是否满足最终功能的实现、结构设计的合理性及成本的高低等要求和相容性原则初步选定以下几种方案作为备选方案:
汽油机→手动控制→凸轮机构→往复切割;
汽油机→机械控制→摆环机构→挠性切割;
移动电源→手动控制→锥齿轮传动→高速回转切割;
交流220V电压→机械控制→锥齿轮传动→高速回转切割。
3 模糊评价
3.1 评价指标及权重的确定
对于绿篱修剪机,从使用的效果、制造的成本和社会效益3方面考虑选择撕裂率、工作幅宽、价格、安全性、噪聲、可靠性和维修性7个指标作为评价目标,利用优序图法确定各评价指标的权重。优序图法是通过对多个指标或目标进行两两相对比较,最后给出重要性次序或优先次序[8,9]。将7个指标两两进行对比,若一个指标和另一个指标相比绝对重要则得4分,另一指标得0分;一个指标相对另一个指标重要则分别得3分和1分;两指标相当则各得2分。表中ki为各个评价指标的总得分,gi为第i个指标的权重,即第i个指标的总得分与所有指标总得分和之比。结果如表2所示。
3.2 评价目标的确定
将评价目标分为4个等级:优、良、中、差,上述7个评价指标相对应的等级级别如表3所示。
3.3 模糊评价矩阵的建立及隶属度的计算
根据以上分析,可以得到评价指标集X、权重矩阵A和评价目标集
X={撕裂率、工作幅宽、价格、安全性、噪声、可靠性、维修性}
A={0.18、0.23、0.12、0.14、0.12、0.13、0.08}
Y={优、良、中、差}
根据上述计算结果备选方案按照最大隶属度排序为3、4、1、2。在方案比较时遵循最大隶属度原则,所以根据排序选择方案3,即移动电源→手动控制→锥齿轮传动→高速回转切割。因绿篱遍布居民小区、各个单位院落和校园,动力采用移动电源可以减少尾气污染、保护环境;手动控制便于在修剪过程中根据成型需要方便调控;切割方式采用高速回转式切割器是以高速回转刀具对绿篱作物形成冲击、砍切,实现对快速绿篱的剪切,撕裂率低;切割运动变换利用锥齿轮传动将水平方向的旋转运动转变为垂直方向的高速旋转,使切割刀片产生高速的旋转切割运动。按照方案3,采用手提抛光机为切割旋转运动变换装置,配以专门制作的切割刀片试制样机2台,用以绿篱修剪试验。结构简图如图2所示。
4 性能试验及结果分析
对绿篱的修剪试验在兰州城市学院培黎校区进行,如图3所示。
试验绿篱长势及大小符合试验要求和机具的适应范围。性能试验依据林业行业标准园林机械—手持式电动绿篱修剪机LYT_2403-2014和《北京市绿篱修剪机的技术要求及操作规程》进行。样机性能试验结果如表4所示。
结果表明,按照相关国家和行业标准测试中该新型手持式电动绿篱修剪机总体工作顺畅,切割性能稳定,割茬整齐,其设计方案合理。
5 结论
运用模糊评价体系,构建了手持式电动绿篱修剪机设计方案模糊综合评价模型,通过综合评价,实现了从多个备选方案中选择最优方案的评价和选择。试验证明,该种评价体系具有一定应用价值,对于从众多方案中选优时有一定的参考意义。
参考文献
[1] 林莉松,刘晓,厉成华,等.小型多功能绿篱修剪机的设计[J].内江科技,2019(03):40-41.
[2]张波,张学敏,邵书山,马念杰,程俊男,张东旭.电动遥控绿篱修剪机的设计[J].中国农机化学报,2018,39(03):19-25.
[3]杨家军,王树才,陈晓峰,等.机械创新设计技术[M].北京:科学出版社,2013:144-146.
[4]冯达.中国人造板产业区域竞争力研究[D].北京:北京林业大学,2011.
[5]姜彦武,魏宏安,史明明,等.基于AHP法的4U-1400马铃薯收获机机械结构的设计[J].农机化研究,2015(11):138-141.
[6]薛媛,牛最荣,赵霞,等.基于模糊层次分析法的疏勒河流域高效节水灌溉项目综合效果评价[J].甘肃农业大学学报,2019,54(02):147-154.
[7]丛晓霞,冯宪章,逄明华.机械创新设计[M].北京:北京大学出版社,2016:96-99.
[8]穆雷,房玉,周明珠.产品色彩意象和材质意象之间联系的探究——以手提包为例[J].基层建设,2018(01):46-48.
[9]邓绍云,文俊.节水灌溉的迫切性及其评价指标与分析[J].云南农业大学学报,2004(04):423-427.
(责任编辑 周康)
收稿日期:2020-08-27
基金项目:甘肃省高等学校科研项目(项目编号:2017C—21);甘肃省高等学校科研项目(项目编号:2018D—18);甘肃省自然科学基金项目(项目编号:18JR3RA225),陇原青年创新创业人才团队项目(项目编号:2020RCXM132)
作者简介:杨天兴(1974-),男,硕士,副教授。研究方向:园林机械;通讯作者水清皎。
猜你喜欢
铁道通信信号(2019年8期)2019-10-10
世界汽车(2017年8期)2017-08-12
南水北调与水利科技(2017年1期)2017-02-27
汽车与安全(2016年5期)2016-12-01
太空探索(2016年12期)2016-07-18
山东体育学院学报(2016年3期)2016-06-27
电子制作(2016年21期)2016-05-17
广西林业科学(2016年1期)2016-03-20
汽车实用技术(2015年8期)2015-12-26
