
基于相位调整响应时间的现代有轨电车优先控制策略研究
2020-11-06 03:02金森元尤伟军
现代城市轨道交通 2020年10期
金森元 尤伟军

摘 要:结合上海市松江区 T2 线现代有轨电车优先控制实际,从交通信号机控制软件实现的角度研究现代有轨电车请求优先检测点的位置、优先相位的最大绿灯时间,以及交通信号机响应现代有轨电车优先控制的策略,同时介绍位置检测器出现故障时交通信号机的处理方法。
关键词:城市交通;有轨电车;信号机;相位;响应时间;优先控制策略
中图分类号:U495
现代有轨电车是近年来兴起的一种新型城市轨道交通,是介于快速公交系统(BRT)和轻轨之间的中等运量轨道交通系统。与其他城市轨道交通方式相比,其具有舒适度高、低碳环保、建设灵活度高、成本低、建设周期短等优势。现代有轨电车通常采用半独立路权的形式,在平面交叉口处与社会车辆共用路权,与路面其他交通方式存在交叉和干扰,因此需要接受道路交通信号的控制。为保证交通信号机对现代有轨电车采取优先控制的有效性,需要对其请求优先的检测器位置,以及对信号机参数中优先相位的最大绿灯时间和相关相位的最小绿灯时间进行合理配置,使得信号机有足够的时间调整相位,保证现代有轨电车不停车并以一定的速度通过路口,同时对路口的社会车辆影响最小。
1 现代有轨电车路权控制系统概述
现代有轨电车路权控制系统由运行控制系统和道路交通信号控制系统组成,如图1所示。图中,轨旁数据传输单元(Wayside Terminal Unit,WTU)用于接收现代有轨电车的位置信息,并将其发送给可编程控制器(Programmable Logic Controller,PLC)。PLC用于控制现代有轨电车的信号灯,根据其运行控制系统和交通信号机的指令控制现代有轨电车信号灯的变化。交通信号机用于控制路口的机动车、非机动车、行人灯组的信号变化,当现代有轨电车将要通过路口时,PLC将其位置发送给交通信号机,交通信号机根据其延误情况或信号控制系统的指令,确定采用何种策略进行放行;同时要保证放行时,交通信号灯的放行相位车流和列车通行没有冲突。
PLC安装在每个交叉路口控制现代有轨电车的信号灯,通过485串口和信号机的串口连接,将现代有轨电车的信息发送给交通信号机,这些信息包括位置信息、速度和延误情况等。交通信号机根据这些信息和自身方案运行情况给现代有轨电车发送是否放行指令。
2 检测点位置设置及其分析计算
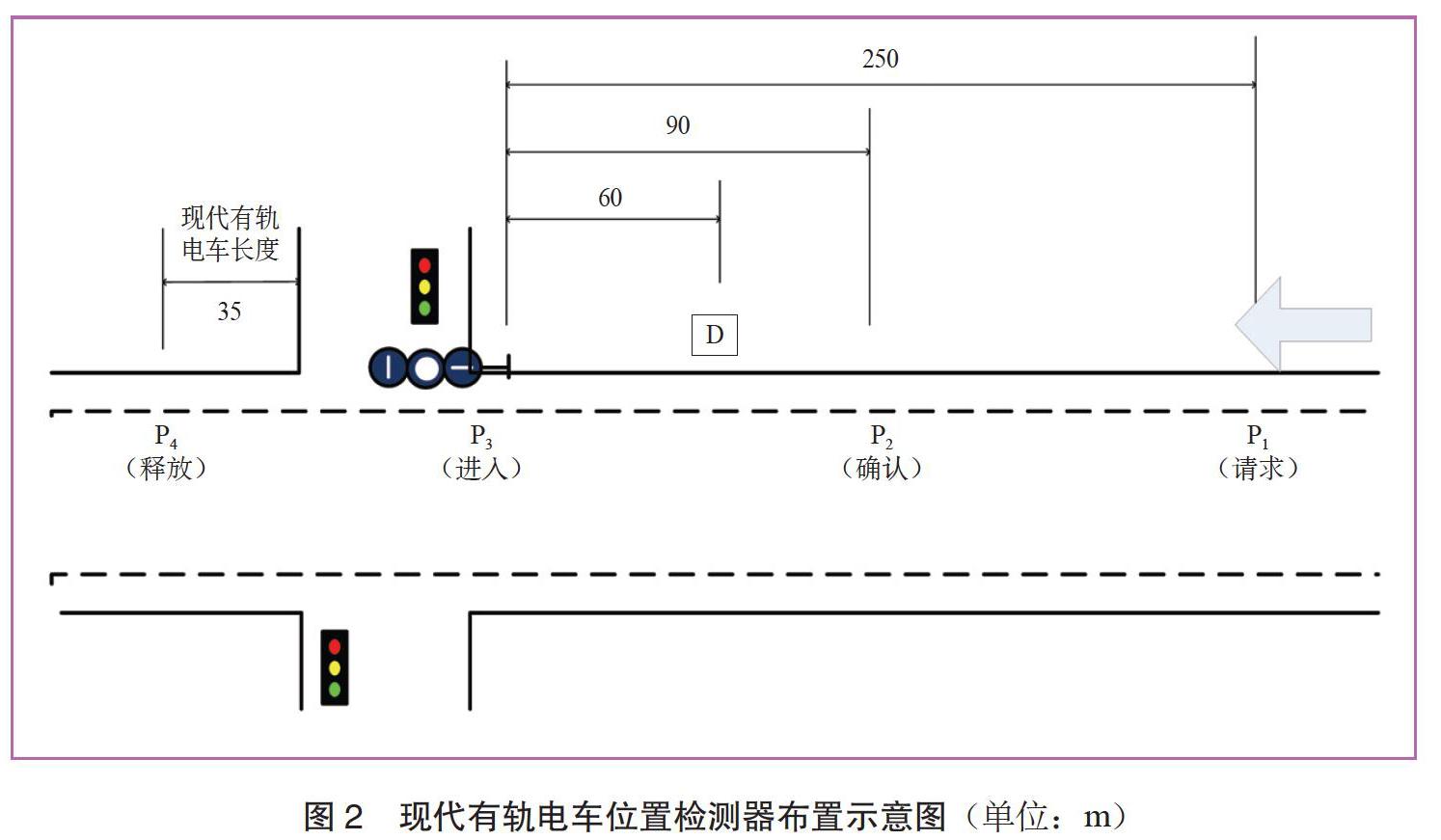
在松江T2线项目中,现代有轨电车的位置检测器在每个路口有4个(P1~P4),如图2所示。P1为现代有轨电车发送优先请求的位置。D位置是一个静态标识牌,用于提示现代有轨电车的驾驶员,如果在D位置现代有轨电车的信号灯没有变为放行状态,要减速停车,安全的刹车距离为60 m。P2为交通信号机给现代有轨电车优先请求确认的位置,在理想情况下距路口90m左右,最小应不小于D位置距停车线的距离,即距路口60m。P3为进入检测器的位置,检测现代有轨电车是否进入交叉口,可埋设在停车线处。P4为释放检测器的位置,检测现代有轨电车是否已经离开路口,由于其长度为35 m,出于安全考虑,P4应设置在离开路口出口处现代有轨电车长度的距离,即35 m处。
2.1 P1——请求优先检测器位置
P1位置是现代有轨电车向交通信号机发送优先请求信号的位置,交通信号机在收到此信号后,应保证通过调整相位运行时间让其优先通行,而交通信号机调整相位时为保证交通安全需要一定的调整时间,因此P1位置比其他检测器位置更重要。下面讨论2种极限情况:①现代有轨电车到达P1位置发出请求信号时,交通信号机刚好退出其对应的通行相位;②现代有轨电车到达P1点时,交通信号机刚刚进入其对应的通行相位。对于上述2种情况,交通信号机可以及时调整相位保证现代有轨电车顺利通行,其他情况的调整时间均在这2种情况之间。
以一个标准的四相位路口为例,假定相位A为东西方向直行车辆放行,相位B为东西方向左转车辆放行,相位C为南北方向直行车辆放行,相位D为南北方向左转车辆放行。其中,相位A是T2线现代有轨电车的放行相位。
2.1.1 极限情况1
现代有轨电车放行的相位刚刚进入绿闪状态,然后进入黄灯,接着进入下一个相位B;将相位B运行一个最小绿灯时间,结束相位B还需要经过绿闪和黄灯的时间;再重新回到現代有轨电车对应的放行相位A。一般绿闪、黄灯的时间均为3s,相位的最小绿灯时间是相位绿灯必须开启的最短安全时间,根据路口大小不同而不同。
如图3所示,现代有轨电车对应的通行相位为相位A,当其在P1位置请求时,相位A刚刚进入绿闪状态,为信号控制安全需要结束当前相位,需经过绿闪时间、黄灯时间,然后进入下一个相位B,运行完相位B的最小绿灯时间,以及相位B的绿闪时间和黄灯时间。因此,交通信号机相位调整的最大响应时间Tmax为:
Tmax = Tgf + Ty + GNP_min + TNP_gf + TNP_y (1)
式(1)中,Tgf为相位A的绿闪时间;Ty为相位A的黄灯时间;GNP_min为相位A相邻下一个相位(即相位B)的最小绿灯时间;TNP_gf为相位B的绿闪时间;TNP_y为相位B的黄灯时间。
首先假设相位B的最小绿灯时间为20 s,绿闪和黄灯的时间均为3 s,根据式(1),交通信号机相位调整的时间为Tmax = 3 + 3 + 20 + 3 + 3 = 32s。然后根据调整时间Tmax和现代有轨电车运行的要求,计算P1位置距路口停车线的距离。
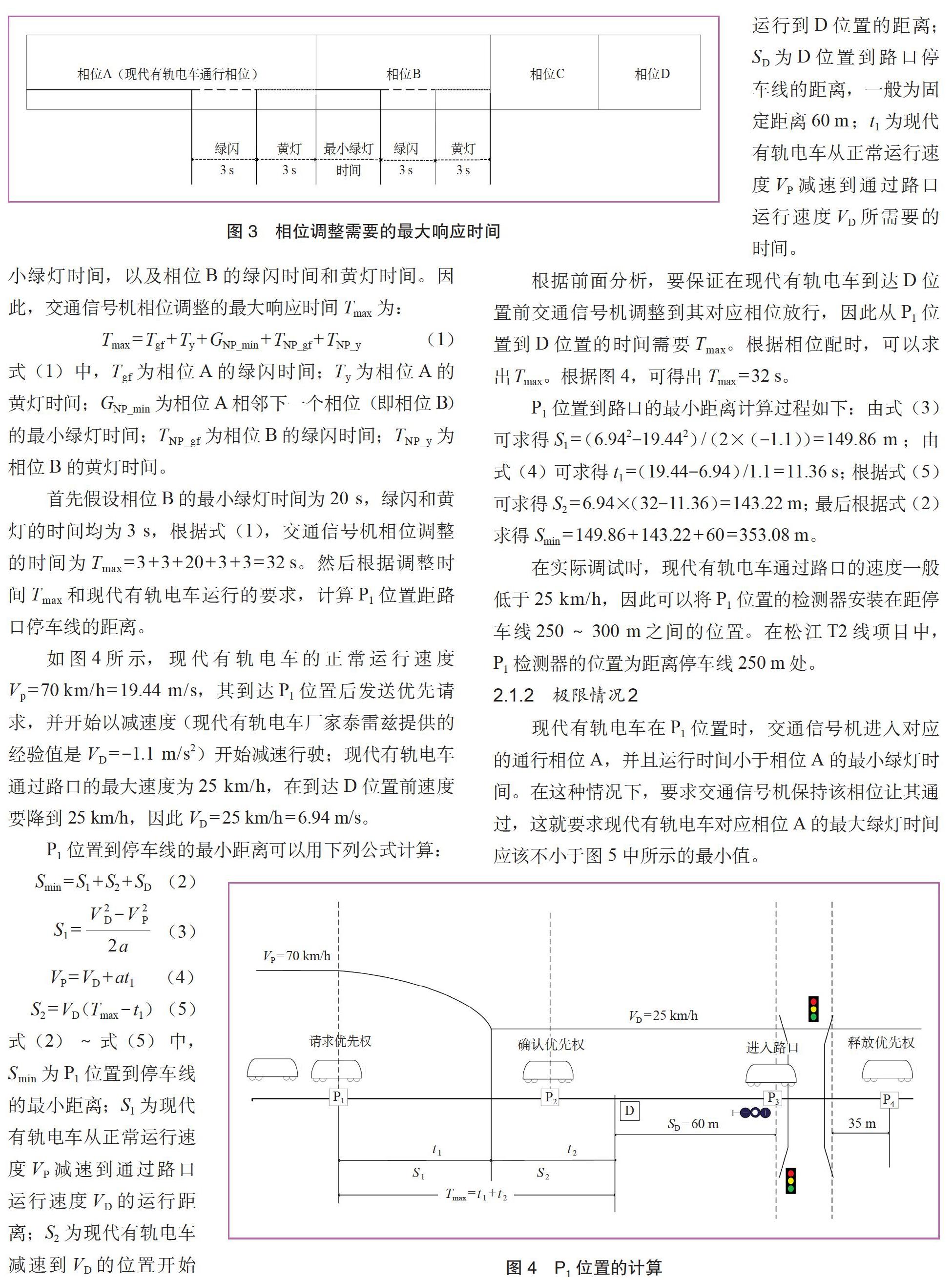
如图4所示,现代有轨电车的正常运行速度Vp = 70km/h = 19.44 m/s,其到达P1位置后发送优先请求,并开始以减速度 (现代有轨电车厂家泰雷兹提供的经验值是VD = -1.1 m/s2)开始减速行驶;现代有轨电车通过路口的最大速度为25 km/h,在到达D位置前速度要降到25 km/h,因此VD = 25 km/h = 6.94 m/s。
P1位置到停车线的最小距离可以用下列公式计算:
式(2)~式(5)中,Smin为P1位置到停车线的最小距离;S1为现代有轨电车从正常运行速度VP减速到通过路口运行速度VD的运行距离;S2为现代有轨电车减速到VD的位置开始运行到D位置的距离;SD为D位置到路口停车线的距离,一般为固定距离60 m;t1为现代有轨电车从正常运行速度VP减速到通过路口运行速度VD所需要的时间。
根据前面分析,要保证在现代有轨电车到达D位置前交通信号机调整到其对应相位放行,因此从P1位置到D位置的时间需要Tmax。根据相位配时,可以求出 Tmax。根据图4,可得出Tmax = 32s。
P1位置到路口的最小距离计算过程如下:由式(3)可求得S1 =(6.942-19.442)/(2×(-1.1)) = 149.86 m;由式(4)可求得t1 =(19.44-6.94)/1.1 = 11.36 s;根据式(5)可求得S2 = 6.94×(32-11.36)= 143.22 m;最后根据式(2)求得Smin = 149.86 + 143.22 + 60 = 353.08 m。
在实际调试时,现代有轨电车通过路口的速度一般低于25 km/h,因此可以将P1位置的检测器安装在距停车线250~300 m之间的位置。在松江T2线项目中,P1检测器的位置为距离停车线250 m处。
2.1.2 极限情况 2
现代有轨电车在P1位置时,交通信号机进入对应的通行相位A,并且运行时间小于相位A的最小绿灯时间。在这种情况下,要求交通信号机保持该相位让其通过,这就要求现代有轨电车对应相位A的最大绿灯时间应该不小于图5中所示的最小值。
P1位置到D位置的运行时间为式(1)中相位A的最大调整时间,因此现代有轨电车对应的优先相位的最大绿灯时间和距离设置用下式计算。
式(6)~式(7)中,Gmax为现代有轨电车放行相位的最大绿灯时间;Gmin为现代有轨电车放行相位最小绿灯时间;S为D位置到现代有轨电车车尾离开路口的距离;L1为路口宽度;Ltram为现代有轨电车的长度,取35m。
假设现代有轨电车通行方向的路口宽度为40 m,通行相位的最小绿灯时间为20 s,相位调整的最大时间采用情况1中假定的32 s,根据式(6)和式(7)计算可得Gmax≥20 + 32 +(60 + 40 + 35)/ 6.94 = 72s。
在实际设置时,根据路口情况在此计算值的基础上增加一些余量。
现代有轨电车优先控制时,当其到达P1位置,在上述2种情况下,按照计算的相位最大绿灯时间配置规则和P1安装位置,交通信号机通过绿灯延长方式或者跳转相位控制方式可以满足让其优先通过。
2.2 P2 —— 确认检测器位置
P2位置是交通信号机发送给现代有轨电车通行指令的必要条件,交通信号机只有在收到其到达P2位置消息后,同时通行相位已经调整到位,才向其信号控制的PLC发送放行指令。
由于现代有轨电车制动需要较长的距离,一般为60m左右,因此P2确认检测器的位置要大于60m。为使现代有轨电车能按25 km/h的速度通过路口,尽量减少刹车,根据泰雷兹公司的经验和现场实际情况,P2位置应设在离路口停车线90 m处。
2.3 P3 —— 进入检测器位置
P3位置用于检测现代有轨电车是否进入交叉口,应埋设在路口停车线处或停车线前2 m处。
2.4 P4 —— 释放检测器位置
P4位置用于检测现代有轨电车是否离开路口,由于其长度为35m,因此P4位置设在距离路口出口35 m处。
3 基于相位调整响应时间的优先控制策略
3.1 控制策略原则
(1)為提高现代有轨电车优先的响应速度,相位的最小绿灯时间应尽量小一些,一般为保证行人安全通过路口的时间即可。
(2)对于一些小路口,路口只有圆形主灯组,同一方向直行和左转车辆没有分开控制,有轨电车在放行时会与左转或直行的车流产生冲突。针对这样的路口,为保证安全,当放行现代有轨电车时,应采用路口交通信号灯全红的控制方式。这也可以认为是一种插入相位的方式,插入的相位是全红相位。
(3)对于2辆现代有轨电车同时进入路口的情况,交通信号机采用“先到先服务”的原则。交通信号机优先读到的P1位置对应的现代有轨电车,按照上述原则进行处理;处理结束后,再处理另一辆现代有轨电车的优先请求。
3.2 控制策略分类
根据现代有轨电车提供给交通信号机的延误等级信息或者上位系统的指令,交通信号机响应其优先请求有以下3种控制策略。
3.2.1 绝对优先控制策略
对于现代有轨电车严重延误情况,应采取绝对优先控制策略用最小绿灯时间结束当前相位,进入其指定相位并发送放行指令,一直放行到其发出P4位置的信号或者超时(超过相位的最大绿灯时间)结束。
如果现代有轨电车在P1位置发出请求,交通信号机正运行在其对应的指定相位,则要判断对应相位已经运行的时间与其预计通过路口的时间之和是否大于相位参数中的最大绿灯时间,如果大于最大绿灯时间,则立即结束此相位,进入下一个相位,等运行完下一个相位后(下一个相位运行最小绿灯时间),再进入其对应的相位放行,按照前面的分析,可以保证其优先通过路口;如果小于最大绿灯时间,则延长本相位,让其通行。
如果当前运行的方案中不包含现代有轨电车放行的对应相位,则按照当前相位的最小绿灯时间运行完当前相位,然后采用插入相位的方式运行现代有轨电车对应的相位,并且运行到其发出P4位置信号或者超时结束。
绝对优先控制策略流程如图6所示。
3.2.2 相对优先控制策略
对于一般延误情况,现代有轨电车采取相对优先控制策略。如果当前运行的方案中包含现代有轨电车的对应相位,则交通信号机按照每个相位的最小绿灯时间运行当前方案,一直运行到现代有轨电车的对应相位,给其发送放行指令,然后一直放行到其发出P4位置信号或者超时结束。
现代有轨电车在P1位置请求时,如果交通信号机刚好运行在其对应相位,要判断此相位已经运行的时间与其预计通过路口的时间之和是否大于相位参数中的最大绿灯时间,如果大于最大绿灯时间,则不授予其优先通行权,等下一个周期再放行(各相位运行最小绿灯时间完成本周期);如果小于最大绿灯时间,则延长本相位,让其通行。
如果当前运行的方案中不包含现代有轨电车放行的对应相位,则按照当前相位的最小绿灯时间运行完当前相位,然后采用插入相位的方式运行现代有轨电车的对应相位,并且一直运行到其发出P4位置信号或者超时结束。
相对优先控制策略流程如图7所示。
3.2.3 伴随优先控制策略
对于准点和提前到达的现代有轨电车,其优先控制采取伴随策略。如果当前运行的方案中包含现代有轨电车的对应相位,则交通信号机正常运行当前方案,一直运行到其对应的放行相位,然后给其发送放行指令,并且保持该放行相位一直到其发出P4位置信号或者超时结束。
如果现代有轨电车在P1位置请求时,交通信号机运行在其对应的放行相位上,要判断此相位已经运行的时间与其预计通过路口的时间之和是否大于相位参数中的最大绿灯时间,如果大于最大绿灯时间,则要等到下一个周期再放行现代有轨电车;如果小于最大绿灯时间,则延长本相位,让其通行。
如果当前运行的方案中不包含现代有轨电车放行的对应相位,则按照方案长度運行完当前相位,然后采取插入相位的方式运行现代有轨电车的对应相位,一直运行到其发出P4位置信号或者超时结束。
伴随优先控制策略流程如图8所示。
3.3 故障处理
在实际运行过程中,现代有轨电车的PLC发送给交通信号机的位置信息会出现丢失的情况。针对这类情况,交通信号机需采取异常处理的方案,由于P3位置的检测器主要用于检测现代有轨电车是否进入路口,并不参与交通信号机的控制,因此主要考察P1、P2和P4位置检测器检测信号丢失的异常处理,具体处理如表1所示。
4 工程实证
松江T2线全长约15.342 km,设站20座,沿线经过32个路口。在实际运行时,为减少现代有轨电车对机动车通行的影响,交通信号机主要采用相对优先和伴随优先的控制策略给其放行。
下面选取一个典型的路口——新松江路/西林北路,对现代有轨电车优先控制的响应时间进行统计分析。该路口是一个三相位路口:相位A为东西方向直行车辆放行(T2线现代有轨电车的放行相位),相位B为东西方向左转车辆放行,相位C为南北方向车辆放行。
交通信号机各相位最大和最小绿灯时间如表2所示。
一天中,有轨电车通过该路口共193次,其中由东向西99次,由西向东94次。交通信号机在收到P1位置请求信号时,开始调整相位长度响应现代有轨电车。当收到P2位置信号后,根据调整是否到位发送放行指令给现代有轨电车,只有在调整到其相位时才能发送放行指令。
交通信号机对接收P1位置请求的时间、收到P1位置请求时所在的相位,以及向现代有轨电车发出放行指令的响应时间进行了记录。其中P1位置请求在A相位出现78次,平均响应时间为13.92 s;在B相位出现39次,平均响应时间为31.33 s;在C相位出现76次,平均响应时间为4.3s。P1位置请求在不同相位时交通信号机的响应时间分布如图 9所示。
由图9可知:P1位置请求在相位C时,平均响应时间最短;在相位B时,平均响应时间最长。这是由于交通信号机采用相对优先和伴随优先的控制策略。当P1位置请求出现在相位B时,交通信号机开始调整但必须经过相位C才能运行到相位A,相位C的最小绿灯时间为34 s。当P1位置请求出现在相位A时,通过延长相位A的绿灯时间响应现代有轨电车,但是有些请求是出现在相位A的绿闪和黄灯阶段,这时需要经过相位B和相位C才能重新运行到相位A,因此响应时间的最大值出现在P1请求在相位 A 时。
由于实际使用时未采用绝对优先控制策略,对图9数据进行模拟绝对优先控制策略处理。P1位置请求在相位B的响应时间应减去相位C的最小绿灯时间;对于P1位置请求在相位A结束时也需减去相位C的最小绿灯时间(如果是伴随优先控制策略,应该减去相位C的方案时间以及相位B的部分时间,为了计算简便,此处均减去相位C的最小绿灯时间,这样得到的响应时间要大一些)。模拟绝对优先控制策略交通信号机的响应时间分布如图10所示。由图可知,响应时间在10 s以下的占比为83.94%,当现代有轨电车发送位置请求时,如果采用绝对优先控制策略,交通信号机基本满足对其的实时响应。
5 结语
由于现代有轨电车在通过交叉口时和社会车辆会产生冲突,为保证其运行的速度、运能和准点率,需要采取优先控制策略。本文通过对位置检测器的合理布局,优先相位的最大绿灯时间配置,以及交通信号机控制对现代有轨电车优先的响应机制,基本可以保证现代有轨电车不停车通过路口。目前,本系统在上海松江T2线项目中已经投入使用,达到了项目要求。
参考文献
[1]王宝辉.上海现代有轨电车发展规划研究[J].交通与港航,2014(2):12-13.
[2]马士江.上海市新城现代有轨电车发展思考——以松江新城为例[J].交通与运输(学术版), 2015(1):182-185.
[3]杨海霞.现代有轨电车信号优先协调控制实践[J].地下工程与隧道,2017(1):49-53,58.
[4]高玉,王洪波.现代有轨电车道口信号控制技术研究[J].现代城市轨道交通,2014(4):1-4.
[5]许帅祥. 现代有轨电车优先协调控制方法研究[D].甘肃兰州:兰州交通大学,2019.
[6]罗聪.现代有轨电车主动信号优先模型研究[J].城市轨道交通研究,2019(4):56-60.
[7]张杨杨. 现代有轨电车交通信号优先控制技术[D].北京:北方工业大学,2017.
[8]张其强,钱晓予,孙蕾,等.有轨电车信号优先控制策略——以松江为例[J].交通与港航,2017(1):27-30.
[9]GB 25280-2016道路交通信号控制机[S].北京:中国标准出版社,2016.
[10] 吴兵,李晔.交通管理与控制[M].北京:人民交通出版社,2005.
[11] 严洋丽,史瑜玲,周志鹏,等.现代有轨电车交叉口信号优先控制研究[J].科技资讯,2018,16(1):40-41,43.
[12] 贺志伟,刘小娟,张杨杨,等.基于车路协同下的现代有轨电车协同控制技术研究[J].工业控制计算机,2017(11):90-92.
[13] 吕柯兴.交叉口处现代有轨电车与其他机动车的平衡感应信号控制方法[J].城市轨道交通研究,2017(4): 72-76,81.
[14] 杨泽皓.有轨电车信号优先系统的研究[J].科技创业月刊,2016(17):132-133.
[15] 黄晓君.上海市松江区现代有轨电车交叉口交通组织案例分析[J].城市道桥与防洪,2018(5):37-41.
[16] 高翔.交叉口信号优先技术在有轨电车系统中的应用研究[J].上海公路,2015(2): 69-72,10.
[17] 张强,张鹏,王露沁. 现代有轨电车平交道口信号优先控制策略研究[J].铁道通信信号,2018(2):80-83,88.
[18] 唐艳. 现代有轨电车路口优先控制的设计与实现[D].四川成都:西南交通大学,2017.
[19] 肖宝弟,王珩,徐意,等. 现代有轨电车信号系统方案与自主化策略研究[J].现代城市轨道交通,2014(2):1-5.
[20] 茆佳能. 基于条件判断的现代有轨电车信号优先控制[J].公路与汽运,2019(2):40-43.
收稿日期 2019-07-18
責任编辑 党选丽
猜你喜欢
看世界(2021年5期)2021-03-25
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科技资讯(2017年19期)2017-08-08
物流科技(2017年5期)2017-07-06
科学与财富(2017年9期)2017-06-09
中国科技纵横(2016年23期)2017-04-06
现代经济信息(2016年31期)2017-03-08
价值工程(2017年2期)2017-02-06
科技创新与应用(2016年34期)2016-12-23
