
解析工业机器人的智能化运动技术控制方式方法
2020-11-06 00:55:26赵亮
工业加热 2020年10期
赵 亮
(宝鸡职业技术学院,陕西 宝鸡 721013)
人工智能技术在我国相对发展成熟,在人工智能的推动下,我国工业自动化生产逐渐开始使用工业机器人[1]。工业机器人可以按照需求智能化调节运用领域,机器人有曲线运动、多点运动、单点运动等多种运动方式,而且都是可人工控制的[2-3]。工业机器人具备的多种运动模式能够替代人工,应用于一些高危领域的作业。各个生产领域应用工业机器人,不仅可以有效地完成生产作业,还可以提供安全保障[4]。
1 工业机器人智能运动控制方法的意义
工业机器人的出现是工业生产存在特殊性的产物。传感器、控制器、机械运动部件、伺服驱动装置共同组成了工业机器人。工业机器人被广泛应用于一些高难度、高精密度的工业领域作业,并且取得不错的成绩,工业机器人的应用,改变了传统手工作业效率低的问题,满足了一些高危行业的应用需求。
工业机器人智能运动控制方法让工业机器人实现了智能化,其意义主要表现在以下几个方面:
1.1 提升工业机器人的生产环境适应性
工业机器人应用于工业生产中,需要其具备与人工作业相匹配的技能。传统的自动化生产设备体积偏大,生产程序繁杂,机器不是很灵活,无法满足特定工业生产的发展需求。工业机器人智能运动控制方法不仅让工业机器人的体积变小,而且更加灵活,工业机器人的生产环境适应性也更强,工业机器人能够模仿人工操作。工业机器人智能运动控制方法使工业机器人的机械结构与人体结构相似,手臂、关节、头部都是按照人体结构来设计的。因此工业机器人在从事生产作业时才能拥有与人工相似甚至更高的精准度,让工业机器人对生产环境有更高的适应性。
1.2 提升工业机器人的兼容性
传统机器人无法从事精密度高的工业生产作业在于未使用智能运动控制技术,传统机器人在从事特定生产作业时,无法根据生产需求灵活转变。工业机器人在应用智能运动控制方法之后,能够灵活变通使用也更加方便,只需要更换运动系统部件,工业机器人就可以应用于其他工业生产领域。因此智能运动控制技术让工业机器人的兼容性更强,可以为不同的生产作业提供服务,实用价值更高。
1.3 提升工业机器人性能,降低生产风险
应用智能运动控制技术的工业机器人从事工业生产,让工业机器人实现了智能化,增加了机器人的灵活性和便捷性。智能运动控制技术的应用,提升了工业机器人的性能,工业机器人智能运动控制就是让机器人模仿人工从事工业生产作业,一些高危行业和作业需要通过机器人来完成,降低人工操作的风险。
2 改良传统PID控制的意义和方法
传统PID控制有很多问题需要改进,曾有相关人员提出实现非线性PID控制。非线性PID控制器的优势在于可以按照系统的实时状态灵活变通,其实就是PID增益系数的另一种表达方式,也就是非线性函数,这样就实现了控制器的灵活变通。研制非线性PID控制器的基本步骤:是通过示范为机器人采集信息,这样可以获取对点数据,将对点数据输入之后,让机器人的动力学方程更加简单明了,以此来推导出机器人多个时刻的多关节传递函数表达式,便可以获取PID增益系数,PID增益的非线性变化有一定的规律,选定之后可以拟合,采用的方法为最小二乘法。对关联内容建立表达式,这就是完整的非线性PID控制器研制步骤。
3 工业机器人智能运动控制方式方法
3.1 提升机器人关节模型算法
拟人运动法是工业机器人的唯一智能运动方法。设计工业机器人的初衷就是让工业机器人来代替人工完成工业生产作业。这就需要工业机器人有一定的灵活性,提升工业机器人关节模型算法可以满足这一要求。让算法更加简单、有效且匹配度高。提升机器人关节模型算法不仅提高了工业机器人的运作效率,还让工业机器人变得更灵活,对于精密度较高的生产作业也可以更好的适应。提升机器人关节模型算法优化了工业机器人的关节摆动灵活度,让工业机器人智能运动控制技术得到提升。
3.2 优化机械传动结构
工业机器人智能运动方法其中包含的主要内容有机械传动结构,工业机器人从事工作生产作业时,通过优化机械传动结构可以增加协调性,机械传动的效率也更高,有助于提升工业机器人的工作效率。机械传动结构的准确性、灵活性、稳定性是设计机械传动结构重点考虑的问题。由于工业机器人的应用领域非常广,因此在优化机械传动结构时,要以满足工业机器人的用途为前提,机械传统结构布局要按需调整。
3.3 完善DNA计算
有一种刚问世不久的计算思维模式叫DNA计算。DNA计算融合计算与有关生物知识的一种全新计算思维模式,这种计算思维模式可以让工业机器人对信息数据更好的分析和处理。DNA计算的不同之处在于混合了数据信息,与核酸分子杂交有相似之处。经过筛选的混合数据会出现可利用的串联数据。DNA计算作为一种全新的计算思维模式,可以帮助工业机器人找到PID最优增益系数。
3.4 提高软件程序设计水平
工业机器人在设计之初,系统程序设计如果存在问题就会影响工业机器人的运动灵活度,设计出来的工业机器人一般在运动方面无法满足需求。也就是说设计者在程序设计时,对工业机器人的使用效率没有充分的考虑。一般来说,设计软件程序时,要以工业机器人的实际用途为设计出发点,程序设计的功能结构要有清晰的区分。设计的软件程序要满足不同的结构功能需求。软件程序的设计能力,是工业机器人智能运动控制的发展保障。
4 机器人运动控制模块
综合应用Windows操作系统和C#高级编程语言,机器人通过编程完成了关节非线性PID控制、神经网络模型控制、免疫克隆PID控制和DNA—PID控制,这四种控制策略最终都与控制系统软件融合(见图1)。

图1 四种控制策略程序流程图
非线性PID要求控制系统设定一个关节角采样时间,并在第一时间获取到的信息传输到程序,程序会按需给出PID增益值,程序会为PID控制器下载PID增益值,机器人运动控制得以实现。与此相近的,在神经网络模型输入设定时间内采集到的关节角位置信息和角速度信息,程序按需给出PID值,并实现PID控制。免疫克隆PID控制和DNA—PID控制第一步就是为程序输入采集到的关节角位置、角速度与对应的设定值,成功辨识被控对象参数,采用与之相对应的DNA算法和免疫克隆算法,获取PID增益值。DNA算法和免疫克隆算法在应用过程中,用户按需选择控制策略,控制系统也会给出相应的控制模块。
5 机器人运动控制实验
分别实验了已知和未知情况下的机器人关节非线性PID控制算法与神经网络PID模型和机器人自适应免疫控制与DNA控制算法。实验结果是Windows XP操作系统运行控制系统程序,对计算机处理器的要求是速度在2.4GHz,512MB内存。控制机器人在设定好设计点坐标的轨迹运动,对比采获的当前点坐标和期望点坐标,可以看出当前运动轨迹出现的偏差(见图2)。
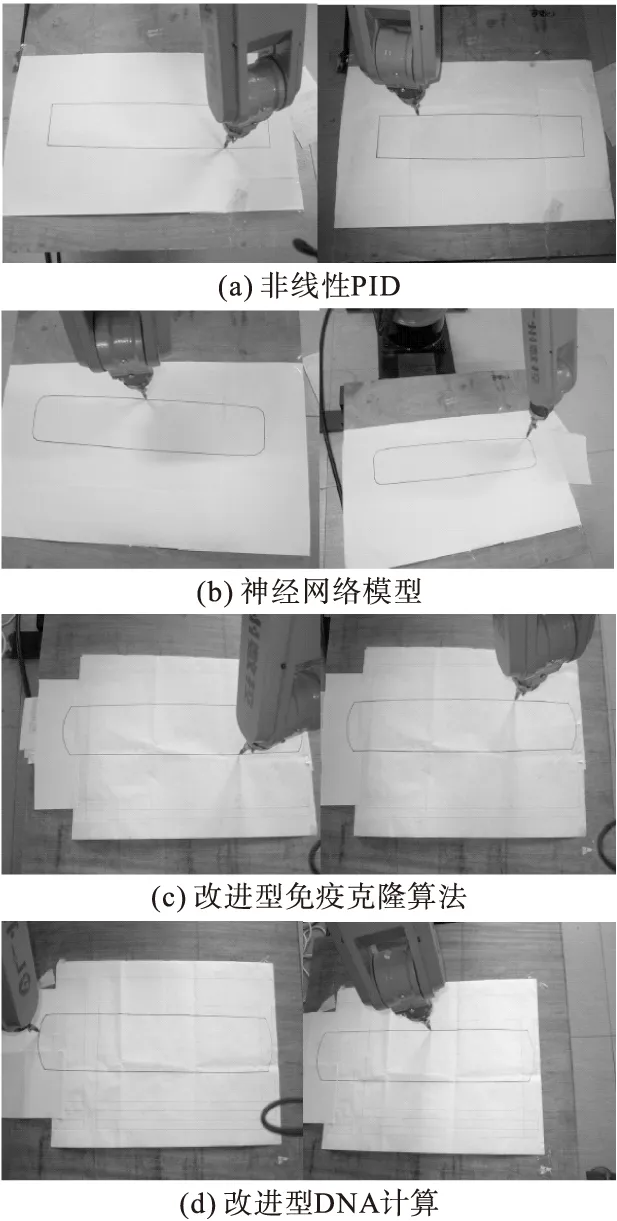
图2 最终的机器人运动控制实验
6 工业机器人的发展前景
工业机器人可以代替人工从事工业生产作业,不仅提高了生产效率,也降低了人工操作的风险,尤其是对于精密度高的工业生产而言意义重大,可以帮助企业完成转型升级。发达国家已经普及了工业机器人,工业机器人不再局限于机械电子制造、汽车制造等领域,采矿、农业生产、物流、军事等领域也开始大规模应用工业机器人,而且使用成果有目共睹,因此还推动了综合国力的提升。但是目前我国的工业机器人数量缺口还很大,应用领域有一定的局限性,这也证明了工业机器人在我国还有很大的发展空间,且潜力巨大,在未来不久的日子,我国一定会实现工业机器人的广泛应用,完成发展目标。
7 总 结
工业机器人在各行各业都有很高的应用价值,对于我国而言,可以通过工业机器人的应用,让更多从事高强度、高难度、高危险的工作人员得到解放,提高产品的质量和产量同时还能提供安全保障。但是目前我国工业机器人的应用发展还有许多问题亟待解决,而工业机器人智能运动控制方式方法的研究是唯一高效的解决办法,因此相关技术研发人员和工作人员要不断提升专业素养,付出更多的努力和汗水研究相关学术知识,让工业机器人能够广泛应用于我国各生产领域,为国家和人民做出贡献。
猜你喜欢
石油沥青(2021年2期)2021-07-21 07:39:48
湖北农机化(2020年9期)2020-01-08 07:40:51
电子测试(2018年9期)2018-06-26 06:45:54
黄河之声(2018年5期)2018-05-17 11:30:01
时代农机(2016年3期)2016-09-06 06:28:21
现代工业经济和信息化(2016年7期)2016-05-17 05:36:45
Coco薇(2015年10期)2015-10-19 12:51:50
机械制造文摘(焊接分册)(2014年6期)2014-03-20 13:57:48
江苏高职教育(2014年4期)2014-02-28 11:40:45
河南科技(2014年8期)2014-02-27 14:07:48
