
自动化沉降观测数据处理研究
2020-11-06 06:54裴孟德
商品与质量 2020年39期
裴孟德
上海建科检验有限公司 上海 201108
传统沉降观测,由专业测量人员逐站(逐点)观测,虽然精度上满足沉降观测的要求,但仍然存在以下问题:①监测频率低,做不到实时监测;②受人员通行限制、地形通视、气候条件等影响,特定条件下存在人工沉降观测无法实施的情况;③人工观测效率低,人力成本较高。
在成本、精度、时效、可行性等方面,传统的人工沉降观测方法与新兴的自动化沉降观测手段相比逐渐失去优势。采用自动化方法,或自动化与人工观测相结合进行沉降观测,已经成为一种趋势。
鉴于传统人工沉降观测方法的一些不足,建立一套具有良好精度和时效性、合理成本的自动化沉降观测系统,已显得较为迫切。自动化采集的硬件设备已经比较成熟,开发与自动化沉降观测系统配套、准确可靠的数据处理软件是重中之重[1]。
1 自动化沉降观测原理
自动化沉降观测一般采用安装传感器采集数据的方法来实现,一般情况下多采用静力水准仪形成沉降观测系统。
静力水准仪是由液位传感器及储液罐组成,各个储液罐之间可以由连通管连接。基准罐设置在稳定的工作基点上,其他储液罐布设于标高大致相同的不同被测位置,当被测位置处储液罐相对于基准罐发生升降时,将引起该罐内液面的上升或下降。通过测量液位的变化,可以得到被测点相对工作基点的升降变形。静力水准系统主要由以下元件组成:静力水准仪传感器、静力水准仪储液罐、静力水准仪支架、静力水准仪通液管、浮子等。

图1 静力水准观测系统示意图
传统的静力水准仪采用机械原理,利用浮子的沉浮反应液面的变化;也有新型的静力水准仪采用超声波传感器测量液面的变化。
2 自动化沉降观测数据处理的难点
自动化沉降观测多采用静力水准自动化监测系统,高频次采集数据,数据采集频率一般可高至1min/次或更高。高频采集的大量监测数据中必然会因为振动、外界偶然荷载等客观因素产生少量异常数据。这些随机出现的少量异常数据,对于人工数据处理来说已经是海量,必须采用软件程序进行异常数据剔除。
除了振动、外界偶然荷载等因素会产生异常数据,精力水准传感器工作区域温度随昼夜温差的类周期性变化,也会导致监测数据的失真,需要进行修正[2]。
如何处理海量监测数据,并对上述引起监测数据误差的因素进行剔除和修正处理,提供准确可靠的监测数据,是自动化沉降观测的难点。
3 自动化沉降观测数据处理算法
在自动化监测的过程中由于传感器本身、电源电路及外界环境的影响,所测得数据不可避免会叠加一些噪声和温度干扰,因此数据处理平台需要内置一些滤波算法对数据进行智能处理,提升信噪比、修正温度影响。具体可以采用的数据处理算法有:
3.1 算数平均法
算数平均滤波法,把连续N 个采样值看成一个队列,队列的长度固定为N,每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据,再把队列中的N 个数据进行算术平均运算,作为本次采样的结果,这种滤波可以去除叠加在低频信号上的高频噪声[3]。
3.2 数字滤波器法
对于高频信号,应当根据信号具体频率,选用如巴特沃兹、切比雪夫等多阶数字滤波器,对信号进行处理。滤波器的截止频率、插入损耗等参数需设置合理,确保在降低噪声幅度的情况下,不影响真实信号。
3.3 限幅滤波法
对于自动化观测过程中常常出现的因偶然因素而引起的脉冲干扰,可以采用限幅滤波法,即根据经验预设两次采样之间允许的最大偏差阈值。每次检测到新值时进行判断,如果本次值与上次值之差小于该阈值,则本次值有效;如果大于该阈值,则本次值无效,放弃本次值,用上次值代替本次值。如果连续多次都大于阈值时,才确认该值真实有效,更新上次采样值。
3.4 3σ 准则法
高频次自动化监测中会收到海量监测数据,其中必然会产生一定比例的异常数据。针对异常数据采用3σ 准则法剔除,即统计单日监测数据均值为μ、标准偏差为σ,单个测量数据的偏差超过3σ 时,可认定该测量数据为异常数据,将该数据剔除后,对剩余数据继续求数据值偏差和标准偏差,直至各偏差小于3σ 为止。
3.5 移动平均法
高频次自动化监测数据是由真实值和随机噪声组成的,为了消除噪声干扰、获取真实值,需要对监测数据进行平滑处理。可以采用移动平均法,即从数据中逐项推进,分别计算含有N 项数据的均值,并采用移动平均值来代替原有数值,以此消除随机波动,得到数据的变化趋势。
3.6 温度补偿法
流体密度与沉降量值的对应函数关系,达到沉降测试的目的。而在日常监测过程中,昼夜温差必然会流体的体积造成一定影响,从而影响沉降监测精度。对温度数据进行处理是为了消除温度对仪器监测的影响。通过温度过滤算法,减少温差对沉降变形的影响,对高度进行温度补偿后,使得测量数据波动幅度明显减小。
静力水准传感器中可以设置温度补偿的电路设计,避免环境温度的影响。
3.7 自动化沉降观测数据处理示例
从多项数理统计模型和数据处理措施入手,在自动化监测数据处理软件中实现了对异常数据的处理和修正优化,示例如图2、3。
4 结语
自动化沉降观测系统在硬件上具有高分辨率、高精度、响应时间快等优点;配套开发与自动化沉降观测系统相匹配的数据处理系统意义重大,数据处理系统必须准确可靠,配套数据处理软件还应具有数据筛查、统计、分析、维护、发布以及报警预警等功能。可从多项数理统计模型和硬件处理措施入手,在自动化监测软件中实现对异常数据的处理和优化[4-5]。
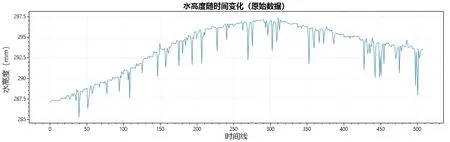
图2 静力水准测量原始数据

图3 静力水准测量滤波、温度修正后数据
猜你喜欢
建材发展导向(2022年10期)2022-07-28
心理学报(2022年4期)2022-04-12
防爆电机(2022年1期)2022-02-16
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
昆钢科技(2021年6期)2021-03-09
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
科技与创新(2016年4期)2016-03-16
中国高新技术企业(2015年3期)2015-03-26
