基于BAS-PID的直流电动机调速
2020-11-05 11:19:26乔永凤周晓莉冯志永
机械工程与自动化 2020年5期
乔永凤,王 凯,周晓莉,冯志永
(山西工程技术学院,山西 阳泉 045000)
0 引言
直流电动机调速是指电动机在一定负载的条件下,根据需要人为地改变电动机的转速。在电动机调速系统中,传统的PID控制器抗干扰能力较差[1],不能实现对参数的快速调整[2],本文采用BAS-PID方法来调速,首先利用BAS算法寻优,将寻优后的值赋给PID三个参数,实现对电机平稳、快速的调速。
1 直流电机数学模型及参数求取
由直流电机的电气性能和机械特性确定其数学模型[3-5]为:
(1)
其中:Ω为电动机角速度;Ua为电机电枢电压;Tm为电气时间常数;Ta为机械时间常数;Ce为电机电势系数。
直流电机传递函数具体表征为二阶无滞后惯性环节,根据其数学模型中参数的定义及经验公式可知电气时间常数Tm为:
(2)

机械时间常数Ta为:
Ta=La/Ra.
(3)
其中:La为电机电枢电感。
2 BAS算法
BAS算法,英文全称beetle antennae search,中文名为天牛须搜索算法[6-7]。该算法是研究人员在2017年提出的,其本质上就是生物启发式算法,是从天牛寻找食物中获得灵感的,其原理为:在天牛寻找食物期间,最初没有办法对食物进行定位,而是通过其嗅觉判断食物气味的强弱来锁定食物的位置,假如天牛左触角认为食物气味强度要高于右触角,则意味着天牛要朝着左边前进,反之朝右边行进。就是依据这种算法,天牛便能够对食物的位置进行判断,并定位食物。
与遗传算法、粒子群算法等算法原理相同,BAS可以在不用确定函数和梯度形式的情况下就能够主动地对问题予以优化,而且只要进行少量的运算,就可以快速地找到最优解。BAS建模步骤[8]如下:
(1)随机创建天牛须的位置和朝向并做归一化处理:
(4)
其中:rands()为随机函数;k为空间维度。
(2)确定天牛左/右须空间坐标:
(5)
其中:xri为第i次迭代时天牛右须位置坐标;xli为第i次迭代时天牛左须位置坐标;xi为第i次迭代时天牛质心坐标;d0为天牛两须的距离。
(3)选取适应度函数f(x)计算左、右两须的函数值,并比较f(xl)和f(xr)的大小决定天牛的前进方向,天牛往适应度值小的方向移动。
(4)根据天牛前进方向迭代更新天牛的位置:
xi+1=xi-δ·b·sign(f(xri)-f(xli)).
(6)
其中:δ为迭代步长因子,取[0,1]之间靠近1的数。
从当前国内市场的肥料产品来看,主要还是以传统的肥料居多。从生产水平来讲,国内的肥料生产水平除了资源性匮乏的几个品种,其他的肥料产品生产工艺和制成技术并不差,甚至好多产品技术和产量都位居世界前列。既然如此,以进口高端肥料为优势的外资化肥企业如何继续服务国内的农业生产?《中国农资》记者采访了欧化农业贸易(深圳)有限公司董事总经理丁振军,听听他对目前外企立足市场的相关思考与见解。
3 PID控制规律
在线性连续控制系统内,PID控制器是一种比较常用的且技术成熟的控制手段之一。PID控制器的输入e(t)为系统输入r(t)和输出c(t)的差值,即e(t)=r(t)-c(t),控制器的输出u(t)对被控对象进行控制。PID是比例、积分、微分三种典型环节的并联组合,其动态方程为:
(7)
其中:Kp为比例系数;Ti为积分参数;Td为微分参数。
4 BAS-PID调速系统设计
BAS-PID就是利用BAS算法对PID控制器的三个参数Kp、Ti、Td进行整定。将BAS算法的空间位置信息设置为3后进行寻优,寻优后的结果赋值给PID的三个参数,然后控制被控对象达到性能要求。在给定的搜索空间范围内,天牛会根据左、右须位置的适应值不断调整位置方向,即更新下一次的位置来逐渐逼近最优目标。其控制过程如下:
(1)首先初始化天牛的位置以及天牛须的朝向,分别计算其左、右须的适应度值,确定天牛的运动方向。
(2)更新天牛的位置和朝向。根据计算出的当前位置下左、右须的适应度值,确定下一步的运动方向。
(3)BAS算法把当前位置信息赋值给Kp、Ti、Td,并驱动被控对象,将系统产生的误差代入适应度函数中计算适应度值。
BAS-PID直流电机控制系统结构如图1所示,其控制流程如图2所示。

图1 BAS-PID直流电机控制系统结构
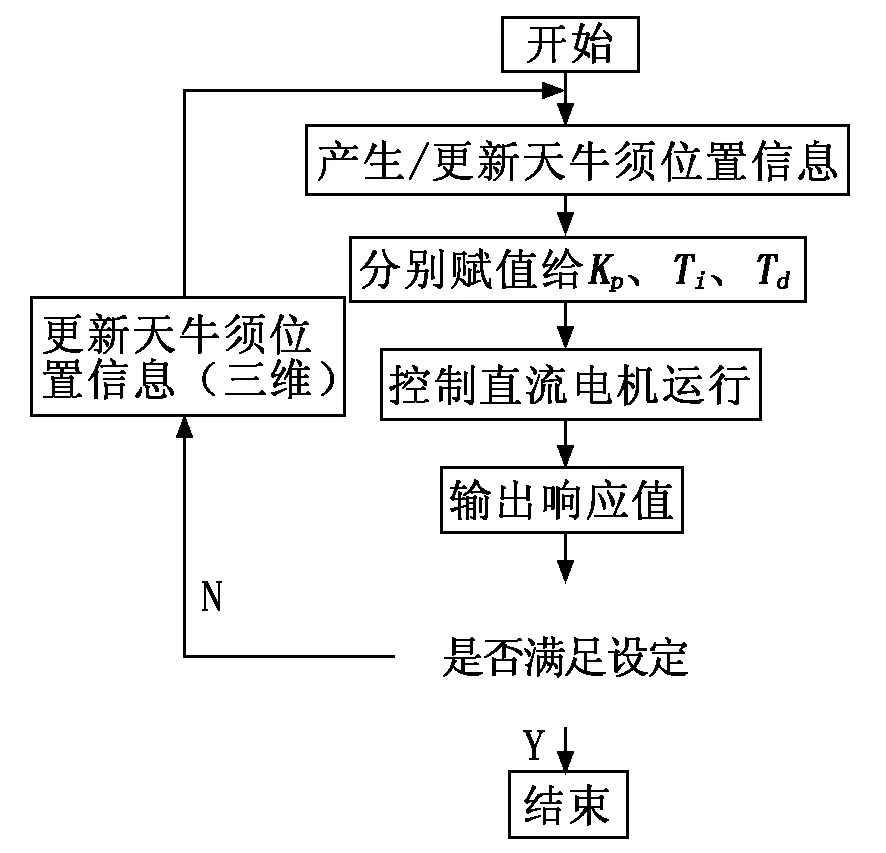
图2 BAS-PID直流电机控制系统控制流程
5 仿真分析
仿真中所用直流电机的铭牌参数见表1。由计算可得:Ra=1.812 Ω,Ce=0.56 V·s/rad,La≈0.235 H,Me=5.3 N·m,Ct=0.51 Nm/A,Ta=0.012 9 s,Tm=0.13 s。将Tm、Ta、Ce代入公式(1),得到直流电机的传递函数:

表1 直流电机铭牌参数

(8)
利用MATLAB/Simulink构建相关模型,并且予以仿真分析。依据对系统调速的要求,以时间与绝对误差积分性能指标ITAE作为适应度函数,即:

(9)
BAS算法仿真参数设置如下:两须之间距离d0=2,最初步长step=5,步长因子δ=0.95,迭代100次,设定的最小适应值为0.1。
BAS-PID控制直流电机仿真模型如图3所示,传统PID和BAS-PID控制的电机响应曲线如图4所示。
从图3可以看出:BAS适应度达到0.004,此时PID的三个参数分别为Kp=25.582 1,Ti=11.587 0,Td=1.711 1。
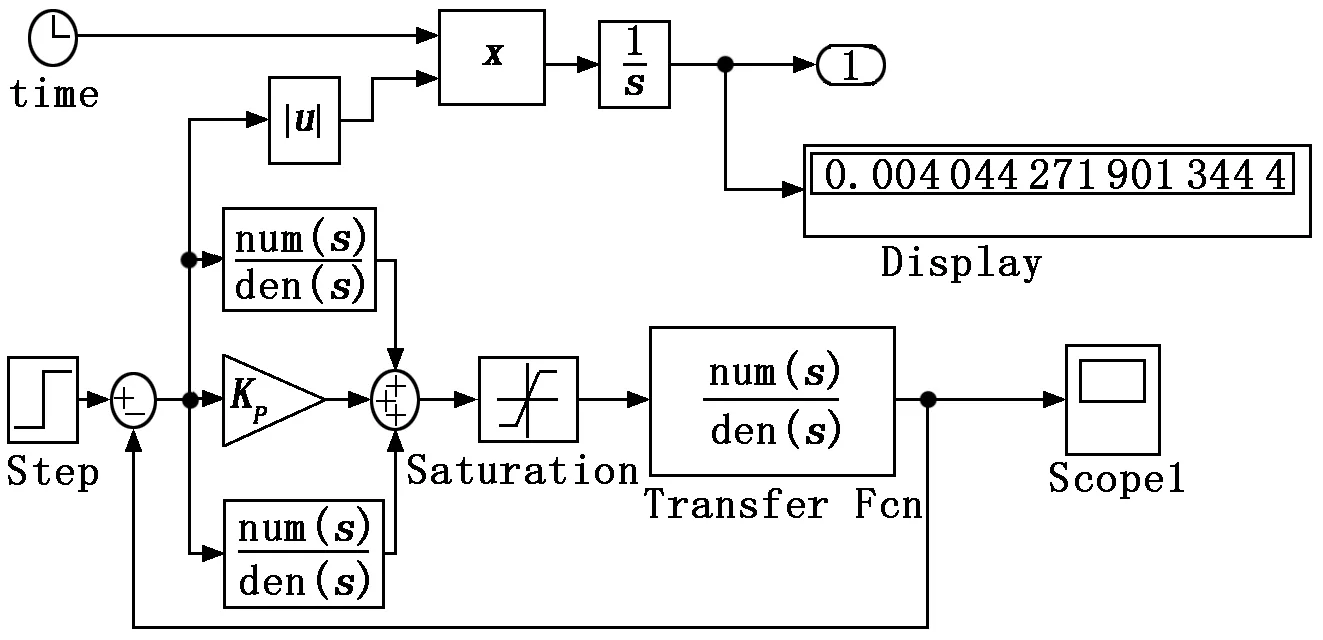
图3 BAS-PID控制直流电机仿真模型
由图4可知:BAS-PID控制直流电机调速,其性能要比常规的PID控制方式优越,调节时间快,无超调,平稳调速,且由于BAS能够自动寻优,计算量几乎没有。
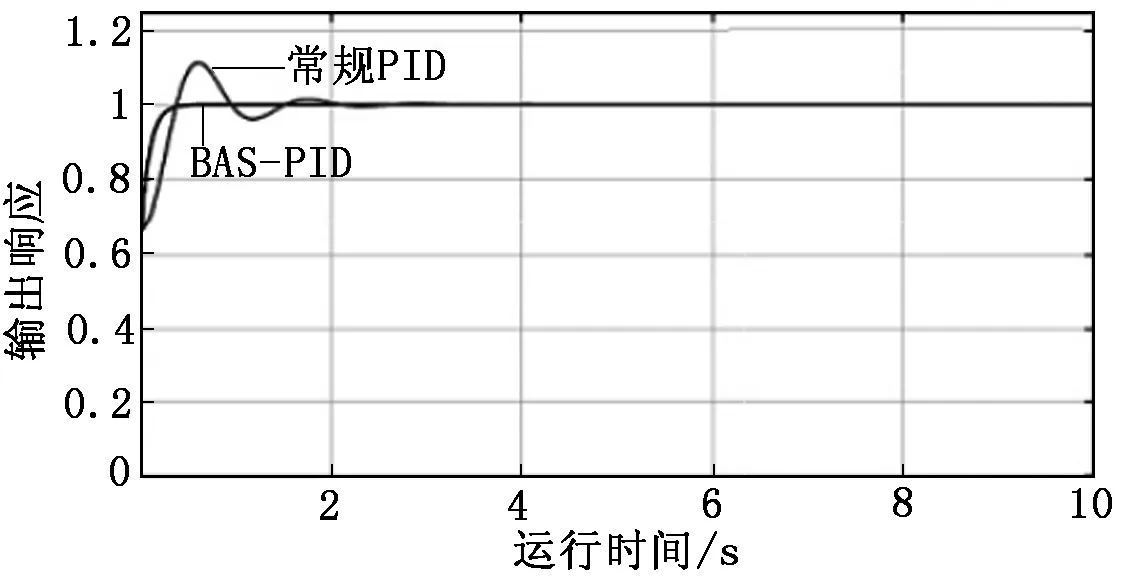
图4 传统PID和BAS-PID控制的电机响应曲线
仿真中发现,BAS寻优过程中,初始步长的设置和最小适应值有关,最小适应值小,初始步长也应该取得小一些。
6 结语
本文提出了一种新的BAS-PID控制直流电机调速方法。用BAS算法根据设定条件进行优化,优化后的值分别赋给PID的三个参数并对直流电机进行调速控制。经由仿真软件MATLAB/Simulink验证得出,BAS-PID能够对直流电机进行平稳调速。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
小哥白尼(野生动物)(2021年1期)2021-07-16 08:02:52
重型机械(2019年3期)2019-08-27 00:58:52
小学生必读(低年级版)(2018年10期)2019-01-04 10:30:56
故事作文·低年级(2018年10期)2018-10-25 20:56:52
电子制作(2017年1期)2017-05-17 03:54:12
作文与考试·小学低年级版(2015年11期)2015-07-17 01:02:16
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
物探化探计算技术(2014年1期)2014-06-27 01:32:50