
充液式无源变色锚杆轴力监测传感器
2020-11-02 08:27:42翟文明梁义维
煤矿安全 2020年10期
翟文明,梁义维
(太原理工大学 机械与运载工程学院,山西 太原030024)
锚杆支护作为煤巷掘进常见的支护手段,可显著提升围岩的完整性和稳定性。在长期支护过程中,深部围岩与破碎围岩应力发生变化,使锚杆受载状态无法准确测定,因此对锚杆支护质量进行实时、准确监测是减少顶板坍塌事故的重要手段[1-2]。目前对锚杆支护质量检测方法有液压法[3],通过观察压力表监测锚杆支护,但无法远距离监测;另有应变片法[4]、应力波法[5]、和光纤光栅法[6]判断锚杆轴力情况,但都需特定信号传输和数据收集,易受干扰且需电源供电,存在一定安全隐患。此外蒋雪洋[7]利用多种色剂变化对锚杆轴力进行监测,但易受温度影响;朱纬亚[8]提出了利用条纹法监测锚杆轴力,但颜色不均,条纹不易分辨。因此提出了一种可远距离监测、不受环境影响、易于分辨的无源式锚杆轴力传感器。
1 理论分析及结构原理
1.1 理论分析
锚杆轴向力充液式无源变色传感器是通过颜色变化监测锚杆轴力变化,必须保证显色光路的搭建。当自然光(矿灯)垂直入射到偏振片形成平面偏振光,当偏振光入射到敏感材料产生双折射光效应时,沿入射点主应力的x 和y 方向分解为2 束平面偏振光E1和E2,由于在敏感材料内的传播速率不同,通过后成为E′1和E′2,产生相应的相位差α,这2 束平面偏振光经反光材料逆反射作用后原路返回,到达人眼[9]。由于光矢量由同一光源产生,从而暂时产生干涉效应,当敏感材料受力后,相位差α随主应力发生变化,其颜色随之变化。
第一主应力σ1、第二主应力σ2与相位差α 的关系可根据光弹性原理推导得出:

式中:λ、R、c、d 分别为光的波长、光程差、敏感材料常数和厚度。
当敏感材料只承受压力时,忽略σ2,因此:

由于σ1与锚杆轴力F 成线性相关,则:

式中:F 为锚杆轴向力;k 为比例系数。
由式(2)、式(3)联立可得:

可知相位差α 与锚杆轴力呈线性关系,在白色光源下,可根据颜色变化确定锚杆受力详细状况。
1.2 传感器的结构及原理
锚杆种类繁多,以樟村煤矿φ20×2200/335 型螺纹钢锚杆为例,其最大破断为200 kN,初锚力为60 kN,取破断力的80%作为警醒状态,破断力的110%作为传感器强度极限。其对应的传感器结构如图1。
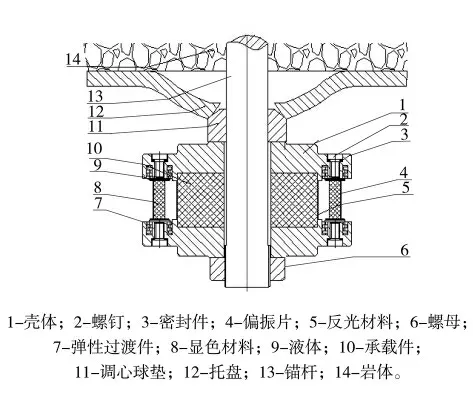
图1 传感器结构模型图Fig.1 Model diagram of sensor structure
传感器整体由均载机构、支撑机构、和显色机构3 部分构成。均载机构由壳体和弹性过渡件组成,其间留有液体腔,有纠正误差和消除显色机构受力不均的作用,壳体与过渡件之间通过环氧胶胶结,壳体外缘处设有注液孔,内有密封件密封液体;支撑机构处于上下壳体之间保持稳定, 通过标定好的支撑机构与显色机构线性压力分配关系,二者共同承担锚杆轴力;显色机构的光路搭建由反光材料、显色材料(显色环)和偏振片组成。当锚杆轴力发生变化时,显色机构所受压力也随之变化,通过均载机构将力均匀传递到显色环上,通过传感器呈现的不同颜色图谱判断锚杆轴力。
2 传感器整体仿真分析
在保证传感器强度特性前提下,通过应变片试验标定颜色-显色环应力关系,根据受载情况进行流固耦合力学仿真[10],考虑中高压状态下流体近似不可压缩,ANSYS 模型对应材料及参数见表1。
表1 ANSYS 模型对应材料及参数Table 1 Materials and parameters of ANSYS model
2.1 传感器可行性分析
由于结构为环状且上下对称,对传感器进行1/2 的三维模型建立,为减少计算时间,忽略圆角与注液孔。然后设置相应单元类型与材料参数,流体单元选择fluid80,弹性件单元选择壳单元shell181,节点相互耦合,承载体、显色环、壳体通过Glue 粘接。
在壳体上端施加警醒力即160 kN,下端施加对称约束,传感器整体轴向应力云图如图2,显色环位移云图如图3。
由图2、图3 可知显色环轴向应力为14.3 MPa;位移为0.094 mm,相应不同轴力下显色环应力与位移见表2。由表2 可知,随着压力增大,显色环轴向应力不断增加,呈线性关系,该传感器设计可行。
2.2 显色环多节点空间颜色均匀性分析
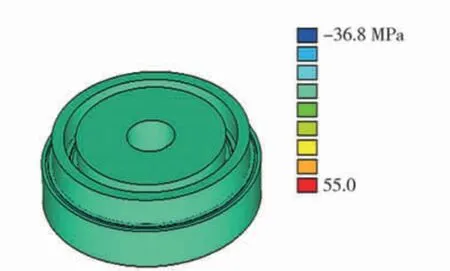
图2 传感器整体轴向应力云图Fig.2 Overall axial stress nephogram of sensor

图3 显色环位移云图Fig.3 Displacement nephogram of color ring

表2 不同轴力下显色环应力及位移变化Table 2 Stress and displacement change of color ring under different axial forces
显色均匀度作为该类传感器研究的重难点,可分为轴向与周向显色均匀。轴向显色均匀要求在轴向高度颜色均匀;周向显色均匀要求在环形360°颜色均匀,轴向显色均匀可根据第一主应力σ1与第二主应力σ2差值变化大小判断;周向显色均匀可根据第二主应力σ2与第三主应力σ3差值变化大小判断,根据对显色环加压试验可知,在低于2 MPa 时可满足显色均匀要求。因此需着重分析显色环单元多节点受力状态,以保证传感器轴向与周向显色均匀,不同轴力下多节点内部σ1-σ2应力关系如图4,不同轴力下多节点内部σ2-σ3应力关系如图5。
由图4、图5 知显色环在轴力为160 kN 时,差值节点达到最大,轴向为1.069 MPa,周向为0.421 MPa,满足试验要求,该传感器颜色均匀。
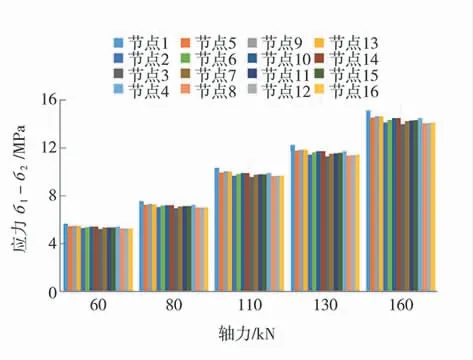
图4 不同轴力下多节点内部σ1 -σ2 应力关系Fig.4 σ1-σ2 stress in each joint under different axial forces

图5 不同轴力下多节点内部σ2 -σ3 应力关系Fig.5 σ2-σ3 stress in each joint under different axial forces
3 试验测试
3.1 轴向力-颜色试验
通过液压式手动压力机对传感器进行压力-颜色试验,流程为:将传感器置于压力机中心位置处,通过液压泵手动持续加压,在维持压力表压力恒定后,观察压力值与颜色关系,利用数显千分尺得出显色环位移变化,传感器压力-颜色试验结果见表3。

表3 传感器压力-颜色试验结果Table 3 Test results of sensor pressure-color
由表3 及颜色显色图谱(图略)可知传感器在锚杆破断前0~160 kN 范围内有6 种不同的图谱产生,层次明显,颜色均匀。加载至60 kN 时,颜色变为紫红色,预紧完成;紫红,蓝,蓝白感知锚杆的不同轴力,表明支护正常;当达到160 kN 时,颜色变成金黄色,即为预警信息,支护进入危险期,需要补强。
3.2 监测传感器影响因素
1)温差对灵敏度影响。由于材料属性与液体热膨胀系数不同,使得传感器的灵敏度受温差影响较大。温差对传感器灵敏度的影响试验具体为:将传感器分别加热到30 ℃和50 ℃,并持续1 h,以保证完全受热,然后立即对传感器进行加压试验,观察压力值与颜色关系,不同温度下压力-颜色见表4。表4 试验结果表明:在温差为20 ℃的情况下,灵敏度变化不明显,误差范围处于0~10 kN 之内,可靠性高。

表4 不同温度下压力-颜色Table 4 Pressure-color relationship at different temperatures
2)偏载对传感器均匀性影响。传感器颜色是监测锚杆支护的重要手段,其颜色单一性至关重要。由于井下锚杆受力复杂,传感器受载无法达到预期理想状态,因此对传感器进行偏载实验尤为关键,根据传感器结构设计,可控制锚杆偏载距离为5 mm。为得到具体均匀性状态,将传感器分别置于偏离压力机中心位置1 、3 、5 mm 处进行加压试验,在压力表压力稳定后观察传感器显色状态,偏载情况下颜色变化情况见表5。由表5 可知,偏载距离为5 mm 以内时颜色单一性未发生变化,对传感器均匀性无影响。
4 结 语
针对锚杆轴力的实时监测,设计了一种基于双折射原理无源变色的监测传感器,对传感器进行了仿真分析与试验。结果表明:传感器设计可行,颜色均匀,可对锚杆轴力进行监测; 传感器颜色过渡明显,可先后产生6 种不同颜色,明显且易于观察;温差为20 ℃时,该传感器在不同压力下显色灵敏度无明显变化,误差在0~10 kN 之间,可靠性高;在液体弹性垫均载下,传感器颜色均匀性好,偏载对传感器的均匀性不产生影响。

表5 偏载情况下颜色变化情况Table 5 Color change under unbalance load
猜你喜欢
施工技术(中英文)(2023年22期)2023-12-17 13:52:08
建材发展导向(2022年18期)2022-09-22 07:12:32
水泵技术(2021年5期)2021-12-31 05:26:40
水道港口(2020年2期)2020-06-08 04:41:12
复杂油气藏(2018年4期)2019-01-16 11:23:54
制造技术与机床(2018年12期)2018-12-23 02:41:12
铁道勘察(2016年3期)2016-08-01 07:20:14
煤炭学报(2015年10期)2015-12-21 01:55:44
中国铁道科学(2015年4期)2015-06-21 06:46:12
制造技术与机床(2015年10期)2015-04-09 07:05:48
