
月面大范围探测功能需求分析及其研究现状
2020-10-31 06:48:02田亚骏
载人航天 2020年5期
田亚骏,张 明*,林 轻
(1. 南京航空航天大学大学飞行器先进设计技术国防重点学科实验室,南京210016;2. 上海宇航系统工程研究所,上海201109)
1 引言
在美国公布重返月球计划后,俄罗斯和欧洲航天大国相继提出载人探月和建立月球基地的计划,随后日本与印度也相继提出独立开展载人航天与探月计划。 随着各国载人航天计划由近地轨道向太空深处延伸,在未来的二三十年,载人探月将成为世界各航天大国竞争和角逐的热点。
中国探月工程近、远期规划分别为无人月球探测、载人登月和建立月球基地3 个阶段,其中近期阶段又分成绕、落、回三步走。 目前,前两步已经顺利完成,第三步也在有条不紊地进行[1]。 中国载人登月论证正处于探索预研阶段,现有的月面交通工具任务模式及活动形式较为单一,月面活动能力较弱,为配合后续月球基地建设方案论证,进一步扩大月面探测范围,急需进行月面大范围探测系统方案论证研究。
根据美国以往经验,在现阶段月面活动中,近距离采取航天员月面行走,远距离采取月球车移动方案,月面地形及月面交通工具能源等因素对月面活动能力和范围有着很大的影响和限制。 未来月球基地的建设及月球全面科考探测亦需要一种探测范围大、探测能力强且经济高效的月面探测系统。 月面探测能力直接决定了月表可达范围及月面活动时间,会相应影响科学探索的结果,因此高性能的月面探测系统对整个载人探月任务的成功以及获取更多科学回报关系重大。
本文对月面大范围探测任务进行功能需求分析,在此基础上对典型的Apollo 月球车和其他行星探测器进行对比分析,得出中国月面大范围探测的可取方案。
2 需求分析
2.1 任务需求分析
2.1.1 月面大范围探测需求
现有月面活动支持系统由于受各种因素约束,探测范围较小。 一般来说,探测的范围越大,获得的探测价值越多;月球科学研究亦有大范围探测需求,譬如月震仪的安装,多个月震仪安装基线距离越远,安装个数越多,对获取月震相关数据精确度有很大的提高。 因此需要研制一种探测范围较大的月面交通工具。
2.1.2 月球表面运输需求
未来月球基地可能将以分散化、多据点的模式建立,各月球基地间存在物资相互运输的需求,同时月球基地有转移或重建的需求,急需一种经济便捷、货物承载量大的大范围月面交通工具进行月面间货物运输。
2.1.3 月球特殊环境探测需求
月面特殊环境中最突出的便是月坑,月坑遍布月球表面,一般具有特殊科研价值和丰富的水冰资源等,因此月坑的探测在月面活动中具有现实意义。 大型月坑一般直径在50 km 以上,深度(月坑壁顶端到月坑底部垂直距离)在2 km 以上,高度(月坑壁到月面垂直距离)在1 km 以上,最大落差可达7 km;小型月坑直径一般不超过10 km,深度在1 km以上,高度为500 m[2]。 现已发现的最大月坑,直径长达1300 km,对各种月坑进行全方位科研探索,现有月球车很难满足要求,需要研制一种不受坡度约束的大范围月面交通工具。
2.1.4 月面紧急救援需求
航天员的安全是月球探测任务的重中之重,航天员外出执行任务需要紧急撤回基地,各月球基地之间需要抢险救援等,急需研制一种快速反应的大范围救援月面交通工具。
2.2 功能需求分析
根据2.1 节任务需求的分析,初步可以得到月面大范围探测系统需要完成各项任务所需具备的功能。
2.2.1 千公里级的大范围探测能力
未来载人探月需要对月球资源和地质调查进行大范围的探测,同时未来的月球基地可能是多点分布式建设(譬如月球探测前哨站等),因此需要一种具备大范围探测能力的交通工具。 但是,现有的月面交通工具探测范围只有几十千米量级,为了获得更多的月球探测价值,月面探测能力需要跨越式发展,将其探测范围扩大至103千米量级。
2.2.2 快速响应的强探测能力
很多月面探测任务、货运任务甚至救援任务有一定的时间强约束,因此要在一定时间内到达预定的位置,开展相应任务,需要月面大范围探测系统具有行程103千米量级、探测时间在小时量级内的快速、强探测能力。
2.2.3 具备多次可重复使用能力
从地球将物质运输到月球,运输成本极其昂贵,需要考虑月面探测系统的经济高效性,因此要求月面探测系统具备可重复使用能力:①月面交通工具应具备多次可重复使用性;②与此相配的地面支持及维修系统也应具备可重复使用性。
2.2.4 具备较强的载荷承载能力
月面探测系统主要用作月面物质运输和月面大范围探测,应当具备相应的载荷承载能力。 在月面大范围探测任务中,其主要承载探测载荷和相应的传感器等设备;在月面物质运输任务中,其主要承载一定质量的物质。
2.2.5 具备多用途扩展的能力
月面大范围探测系统的研究应具有远程操控能力,同时兼顾月面长期驻留、月球基地建造、应急救援等多样化的后续任务,并且应采用模块化设计,具备多用途扩展能力。
3 行星探测器研究及应用现状
月面103千米级大范围月面交通工具的研究一般从现有技术基础上发展而来,其功能性指标可参考载人月球车和火星飞行器的设计思路和技术特点。
3.1 Apollo 载人月球车
月球车是目前最为成熟的行星探测器,国内外对月球车的研究较多,本文对最具代表性的Apollo 载人月球车进行详细综述,此外还有许多其他的典型月球车可供参考,如ATHLETE 载人月球车[3]、DMLRV 双模式月球车[4]、好奇号火星车[5]、Chariot 载 人 月 球 车[6]、 LUNAR TRUCK CONCEPT 月球车[7]。
上世纪70 年代初,美国Apollo 月球车执行了3 次载人登月任务,属于一个具有基本配置和功能的经典月球车,能在3 h 左右时间内进行最大距离为30 km 左右的探测任务,最具有借鉴价值的是其折叠展开方式和车轮结构,如图1 所示。Apollo 的车轮直径为81.3 cm,宽度为22.9 cm,主要由盘形轮毂、内外轮毂和丝网胎面构成。 车轮在轮毂处的退耦装置可以在牵引驱动系统发生故障时,通过退耦操作使其变为从动轮。 其车体分为3 段,最大限度增加了轮轴距,提高了车辆稳定性。 此外,折叠时只涉及车轮,不涉及车体承载的操控分系统、天线、相机和有效载荷,相对容易实现[8-11]。
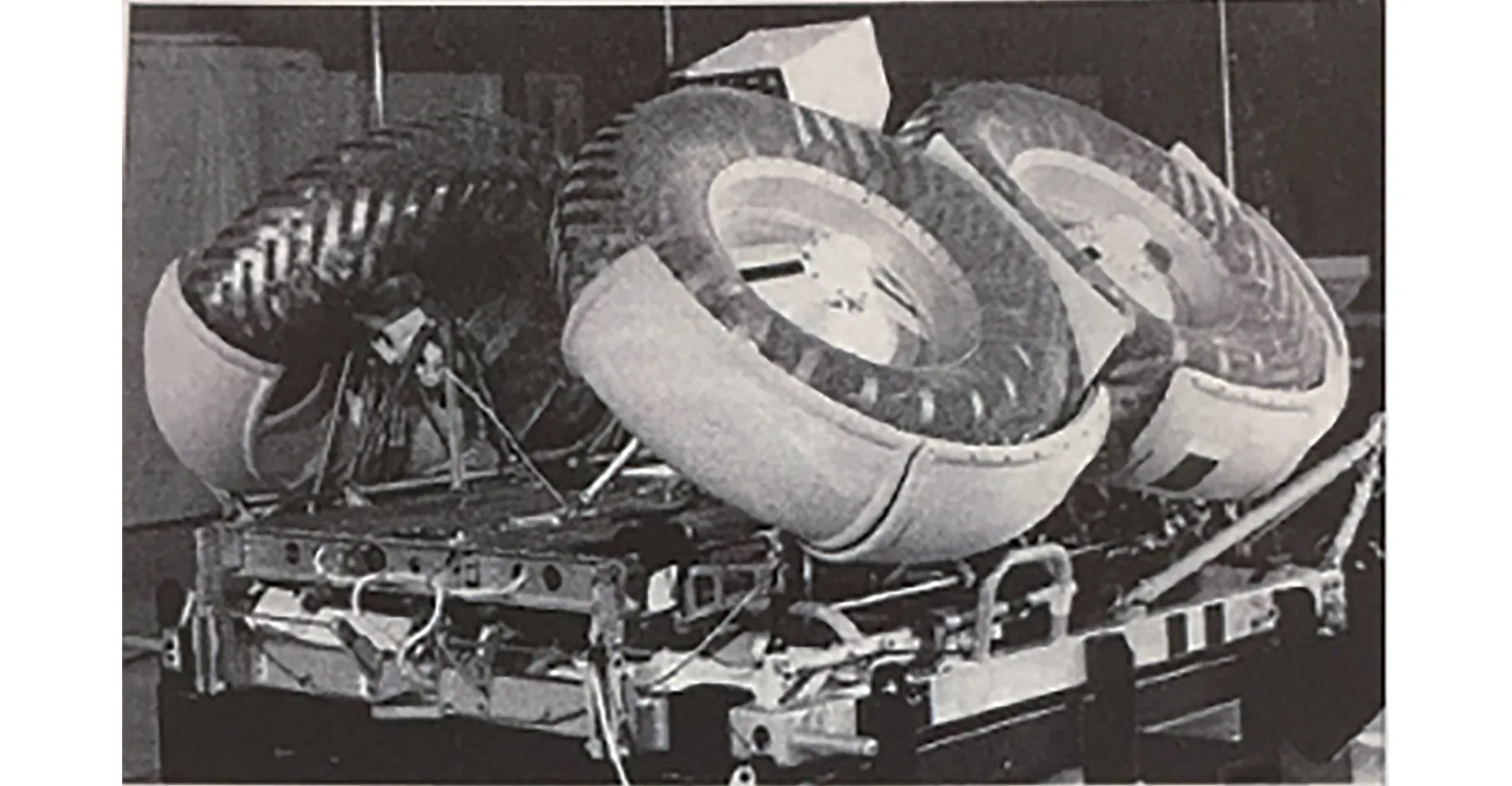
图1 月球车折叠状态Fig.1 Lunar rover in folding state
但Apollo 载人月球车主要存在以下缺陷:
1)Apollo 月球车采用了后背式的生命保障系统,这样容易使航天员产生身体疲劳,且探测范围较小,一般限制在距离登月舱5 km 的范围内。
2)Apollo 载人月球车的可携带载荷较少,一般可搭载2 人,车身质量约为270 kg,其他负载约为670 kg,车体较为笨重,设备相对简陋,传输能力和运载能力较差。
3)由于月壤较为松软[12],且月球的重力加速度约为地球的1/6,所以Apollo 载人月球车在月面环境下行驶速度不能超过16 km/h,当速度接近14.4 km/h 时,若遇到冲击,车轮会离开地面,导致月球车失控。
4)由于Apollo 载人月球车的结构设计较为简单,执行任务时会导致月壤黏在车轮表面,甚至进入月球车的构建内部,造成零部件磨损损坏,且会降低车辆散热性能,寿命较低。
3.2 火星飞行器
3.2.1 火星直升机
NASA 喷气推进实验室在2014 年首次公开了一款概念型的小型无人火星直升机,如图2 所示。 这种直升机外形近似立方体,边长为10 cm,整机质量约为1.8 kg,采用双旋翼共轴串列布局,长为1.2 m,旋翼轴的转速为2800 r/min。 最新的原理样机已于2017 年底成功进行了火星大气环境模拟试验,设计的飞行次数不超过5 次,每次可飞行600 m 左右,在飞行过程中能定位许多值得研究的目标[13]。 这种低空侦查直升机可以对火星车进行领航,为火星车的移动探测提供最佳路线。 2018 年美国已正式宣布将该项目纳入到火星2020 探测器项目任务中。

图2 NASA 火星直升机[13]Fig.2 NASA mars helicopter[13]
3.2.2 空中区域性环境探测(ARES)火星飞行器
2004 年美国提出了空中区域性环境探测计划(Aerial Regional-scale Environmental Survey),并进行了原理样机的地面验证试验。 由于火星表面大气稀薄,故采用火箭发动机为动力源,以克服相关难题。 以飞行的方式可以到达一些极端复杂区域进行探测,对火星实现较为全面的覆盖。 得益于翼身融合技术和较大的展弦比,ARES 飞行器拥有良好的气动特性,可在火星表面完成较大范围的一次性探测任务。 通过其携带的高分辨率摄像机,可以在飞行过程中得到高分辨率图像数据。飞行器以Li-SO2电池为电子设备供电,以双组元液体火箭发动机为动力装置,故不可重复使用。飞行器由进入舱携带进入火星大气,在离地8 km处同进入舱分离并减速下降,并在离地2 km 时进入巡航飞行状态,巡航速度为145 m/s,飞行时间约为1 h,航程最大可达600 km[14-16]。 ARES飞行器的飞行效果和总体任务路线如图3 所示。
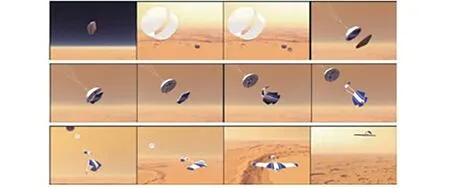
图3 ARES 飞行效果和总体任务路线[14-16]Fig.3 ARES flight effectiveness and overall mission route[14-16]
3.2.3 火星滑翔机
NASA 阿姆斯特朗飞行研究中心计划在2022~2024 年火星任务中搭载一种小型滑翔机Prandtl-m,如图4 所示。 受到回旋镖和鸟类的启发,这种滑翔机是在100 多年前德国工程师Ludwig 提出概念的基础上进行研发的。 它没有方向舵,机翼微微扭曲,有助于减小空气阻力,使效率最大化,在火星大气上空释放,在降落的过程中收集数据。 其翼展为61 cm,质量为0.45 kg,在进入火星大气后高度为600 m 时开始滑翔,航时10 min,航程为32 km[17]。 NASA 希望能在即将到来的Mars2020 任务中发射这种滑翔机。
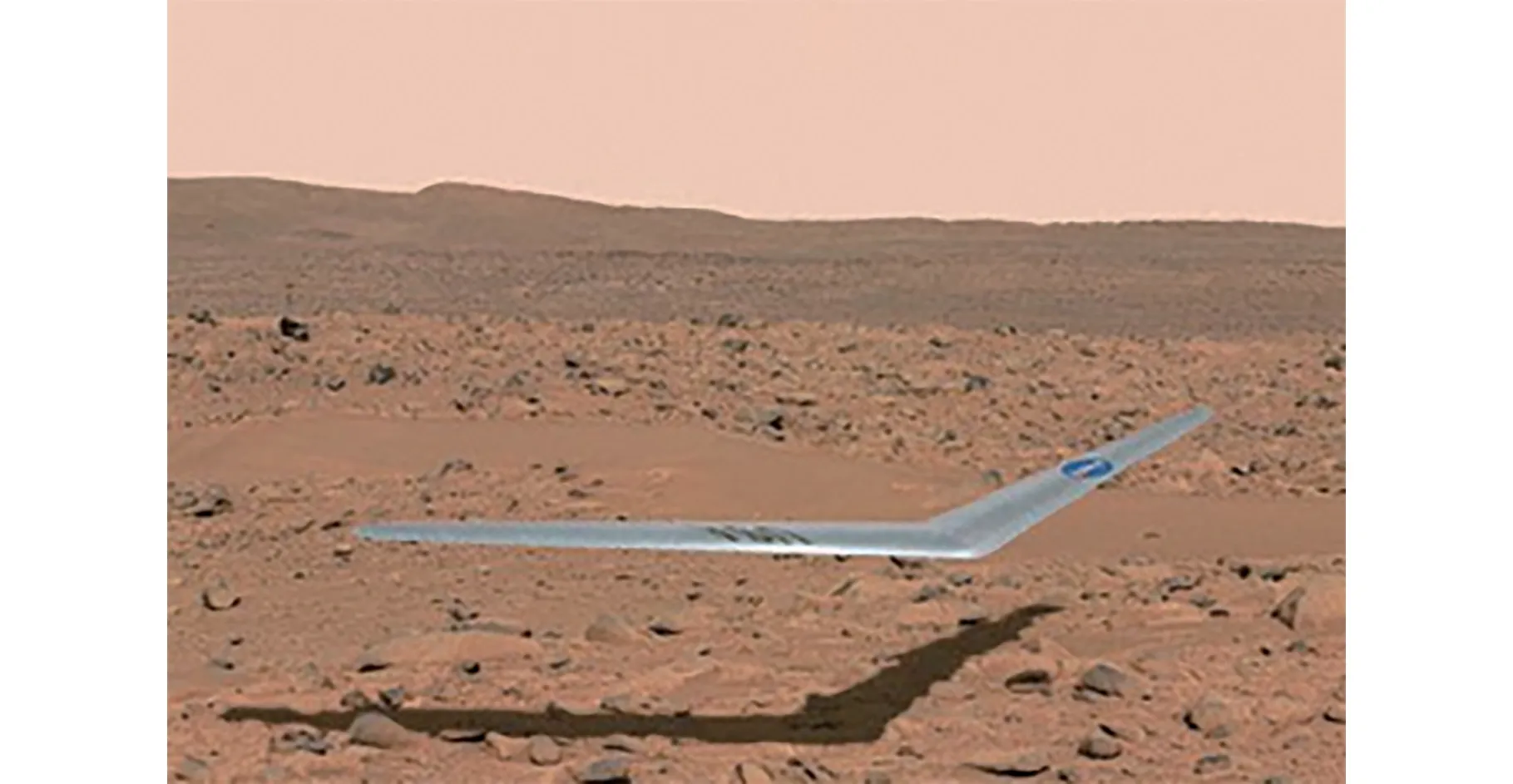
图4 火星滑翔机[17]Fig.4 Mars glider[17]
3.3 其他方案
3.3.1 风滚火星探测器
NASA 在1998 年就已经开始了风滚火星探测器的研究工作,如图5 所示。 这种火星探测器不需要任何引擎,只需要风力就可进行移动。 主要用于火星飞行器和火星车难以到达的沟壑和峡谷处探测,预计质量为20 kg,直径在6 m 以内,速度为20 m/s,所需的科学仪器位于球内部,如果需要停下来进行测量,可以使球体部分泄气[18]。目前,NASA 已经在地球上顺利测试了风滚火星探测器原型机。
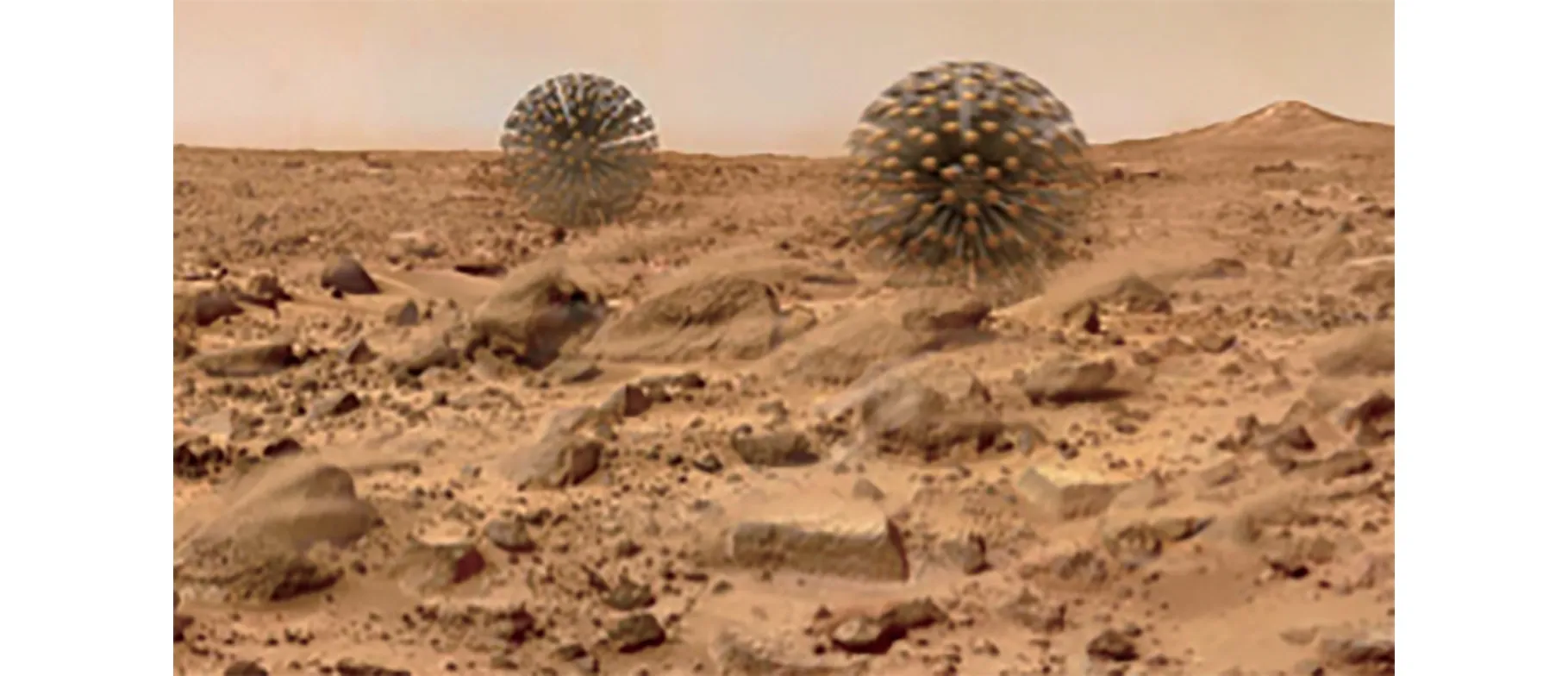
图5 风滚火星探测器[18]Fig.5 Wind rolling Mars probe[18]
3.3.2 跳跃式探测器
以色列的SpaceIL 团队参加Google 月球X 大奖的跳跃式探测器方案较为出众,如图6 所示。探测器高为1.5 m,直径为2 m,质量约为600 kg。SpaceIL 的月面移动方案未使用履带式或轮式车辆,而是计划使用火箭推进,并利用弹跳装置在月球表面移动500 m, SpaceIL 的着陆器在着陆后将使用水平与垂直方向的助推火箭进行短距离飞行,完成在月面移动500 m 的比赛要求[19]。 此项目原计划2017 年年底使用SpaceX 公司的猎鹰9火箭运输登陆器前往月球,最终以2019 年坠毁于月球表面宣告失败[20]。

图6 SpacelL 着陆器原理样机[19]Fig.6 Principle prototype of SpacelL Lander[19]
3.3.3 月面电磁发射
1970 年末,NASA 的研究就已经明确表明,相比于传统化学火箭运输,基于月球基地的电磁发射技术是最佳技术选择途径,如图7 所示。 在技术条件成熟的情况下,这种电磁发射的方法具有极大的优势,可以做到快速连续发射、无废气、维护成本低、无危险燃料[21]。 虽然电磁发射技术还不成熟,但是各国对电磁弹射的研究从没有中断过,将飞行器以电磁发射方式入轨,无论是探测还是货物运输,都具有着不可替代的优越性。
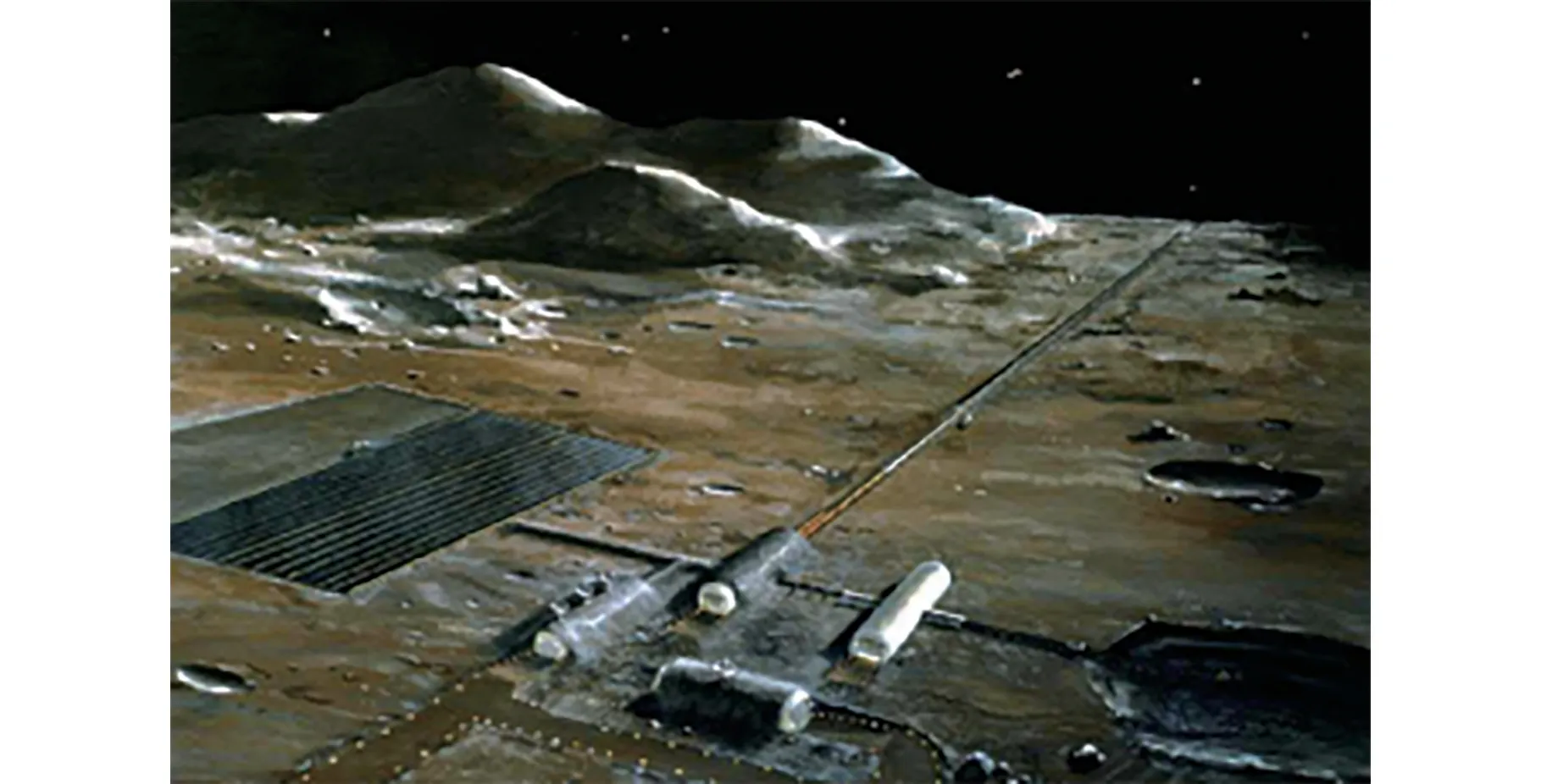
图7 月球电磁弹射想象图[21]Fig.7 Imagination map of electromagnetic lunar launch[21]
4 月面大范围探测方案
4.1 技术途径分析
根据月球车、火星飞行器以及其他方案的研究现状,归纳出可采用的技术途径分为2 类:①采用月球表面移动技术,典型的譬如月球车方案;②采用月面低空飞行技术途径,典型的如飞行器方案。 典型月面探测技术途径如图8 所示,对4 种典型技术途径优缺点对比见表1。
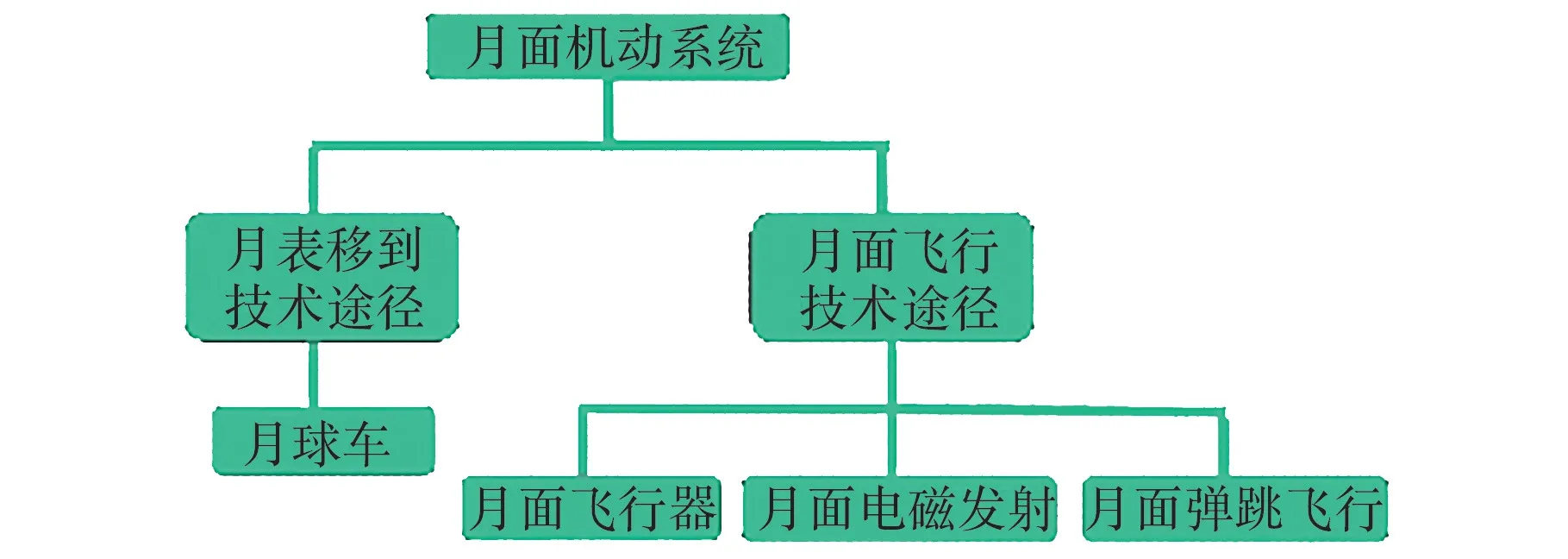
图8 典型月面探测技术途径Fig.8 Typical approaches of lunar surface detection
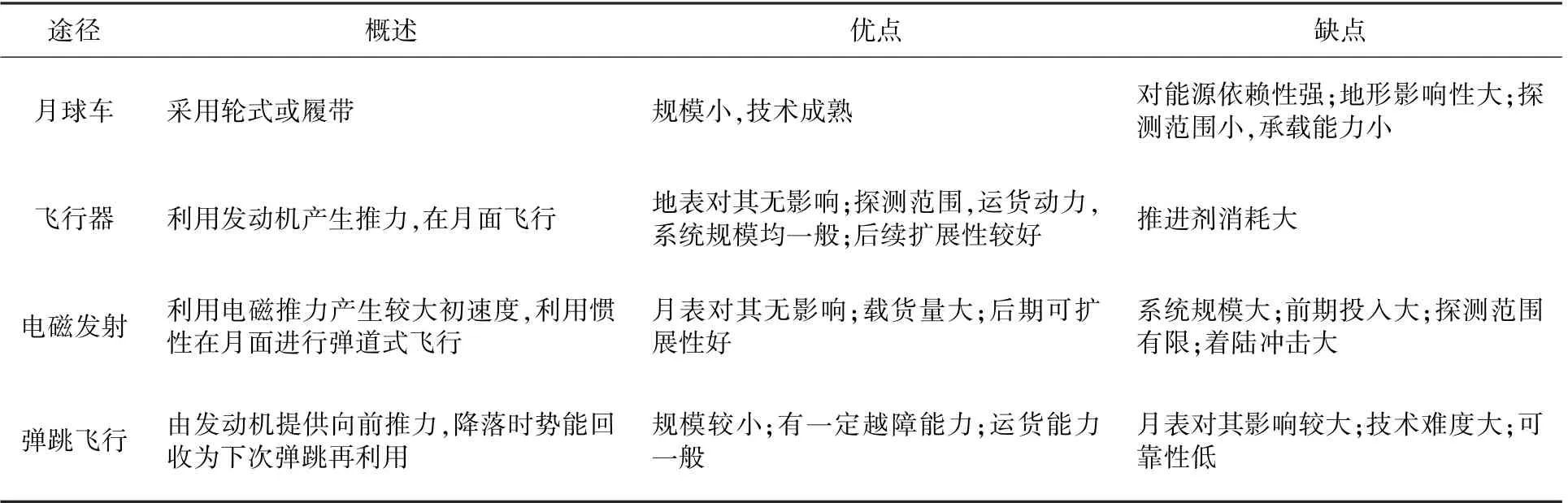
表1 技术途径概述与优缺点对比Table 1 Overview of technical approaches and comparison of their advantages and disadvantages
其中,月球车方案技术最为成熟,已有多种不同类型和型号的月球车用于月球探测,但月球车在月球表面行驶且速度较慢,探测范围一般为几十千米,运输能力一般为几百千克,可扩展性较差。 对月面特殊环境探测一般要用到多种不同功能与形态的月球车,单一月球车难以满足;火星与月球最大不同在于火星表面存在稀薄大气,火星探测器可依靠大气作为动力对其进行探测,如火星直升机、火星滑翔机、风滚火星探测器等。 但月球表面近乎真空,这种飞行方式在月面不可实现,实现月面飞行必须依靠类似火箭发动机的动力源来实现,如空中区域性环境探测火星飞行器。 飞行器方案的飞行速度较快,具有较好的快速响应能力和紧急救援能力,装备起落装置后,具备可重复使用性。 运载能力和探测范围可根据需要综合分析,配备满足条件的发动机和推进剂。 同时考虑模块化设计和起飞质量优化问题,可扩展性较好,可采用子母机的方式对一些特殊区域进行探测,如沟壑或峡谷等;电磁发射方案的难度较地面发射低,月球重力加速度约为地球的1/6,且无气动影响,使得月面磁悬浮电磁发射可行性更高,同时电磁发射系统可以大幅提高飞行器的初始速度,以增强飞行器快速响应的强机动性;弹跳飞行方案的技术实现途径较为新颖,每次弹跳距离有一定限制,可通过多次弹跳的方式实现大范围探测,但技术难度过大,目前为止还没有成功样例,需要进一步的技术积累与验证。 由于其自身的特殊结构,其他性能一般。 各技术途径特点见表2。

表2 各技术途径特点Table 1 Characteristics of various technical approaches
由上述可知,4 种典型技术途径各有优缺点,根据需求分析,结合中国载人探月相关任务规划以及对未来载人行星探测的技术带动,综合比较,月面飞行器方案和月面电磁发射方案能够满足大范围探测的任务和功能需求。 飞行器方案相较电磁发射方案系统规模较小,实现难度较低,货物承载量小,可在月球基地前期,未完成月面电磁发射系统建设之前使用。 完成月面电磁发射系统建设后,可利用月面电磁发射系统为飞行器提供初始速度和动能,从而减少推进剂消耗量,提高货物承载能力。 因为电磁发射时加速度过大,已超过航天员承受过载,所以电磁发射技术途径是无人货运的最优方案。 综上,月面大范围探测的最优技术途径为月面飞行器方案。
4.2 飞行器方案
4.2.1 方案概述
飞行器相比于传统行星探测器,拟采用低空飞行方式,飞行器配备有起落滑跑装置、矢量火箭发动机、应急救援设备等,兼具有人与无人远程控制2 种操作模式,并采用模块化设计,可通过增挂推进剂储箱实现103千米级大范围探测。 月面飞行器假想图如图9 所示。

图9 月面飞行器假想图Fig.9 Imagination map of lunar aircraft
采用低空飞行方式,可以对月面的各种复杂情况实施大范围探测;起落滑跑装置可保证飞行器可重复使用性,同时具备月球车的相关功能;矢量火箭发动机可保证飞行器具有良好的动力与承载能力,为其提供优越的机动性和操作性,使其拥有快速响应能力;应急救援设备可以最大限度地保障航天员的生命安全,并可执行应急救援任务,应对多种突发情况;多种操作模式可以提高飞行器的可靠性,扩展不同任务需求;模块化设计可以为多型号、多任务扩展提供基础,使飞行器具有良好的可扩展性。
4.2.2 任务流程
月面大范围探测任务由月球基地出发,对月面进行大范围探测,探测范围103千米级,探测过程中不进行推进剂补给,由飞行器全程携带推进剂,任务流程如图10 所示,具体如下:

图10 任务流程图Fig.10 Diagram of mission flow
1) 月球基地处,由月面后勤保障人员和相关机器人完成对月面低空飞行器的推进剂装填和货物装载。
2) 航天员穿戴好航天服,进入月面低空飞行器,月面低空飞行器开启发动机升空,发动机主要提供抵消飞行器月球重力的推力和飞行器向前飞行的动力,由于月面没有大气阻力,飞行器达到最优平飞速度以及预期飞行高度后,发动机主要提供抵消月球重力的推力即可。.
3) 月面低空飞行器飞行接近至月面探测区,水平减速和姿控发动机开机工作,进行水平方向减速和调姿,而后软着陆于月面探测区域。
4) 航天员在探测区域进行月球科学探测或执行相关任务,期间航天员可利用月面低空飞行器轮式机构进行月面小范围移动,同时可以在探测区域卸载物资,建立月球前哨站或在探测区域进行应急救援任务。
5) 完成任务后,月面低空飞行器根据预期弹道先进行上升段飞行,返回月球基地A 处。
6) 月面低空飞行器飞行接近至月球基地A处,水平减速和姿控发动机开机工作,进行水平方向减速和调姿,而后软着陆于月球基地处。
采取月面飞行器方案可以满足大范围探测的功能需求,能够达到具备103千米级大范围探测能力、快速响应的强探测能力、可重复使用能力、较强的承载能力和多用途扩展能力等,并且可完成大范围探测任务、运输任务、特殊环境探测任务、紧急救援任务等。
5 结论
1)月面飞行器方案可以满足月面大范围探测的要求,多任务扩展能力好,该方案是月面大范围探测的最优方案。
2)结合电磁发射的技术特点,在后期月球基地建立的基础上,电磁发射方案为货运任务的最优方案。
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
工业工程设计(2021年3期)2021-06-30 12:15:04
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年9期)2016-07-12 10:00:05
太空探索(2016年9期)2016-07-12 10:00:02
太空探索(2016年6期)2016-07-10 12:09:06
太空探索(2015年1期)2015-07-18 11:02:13
中学科技(2015年7期)2015-07-03 05:44:32
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00
