
电液伺服系统自适应位置控制方法的设计与仿真
2020-10-22 02:57肖小春陈智才
卫星电视与宽带多媒体 2020年19期
关键词:神经网络
肖小春 陈智才

【摘要】为了提高电液伺服系统对目标位置的跟踪效果,本文设计了电液伺服系统自适应位置控制方法。通过液压缸不同腔室的压力推到了系统的流量方程,采用活塞的位移,建立了液压缸的动力学方程,通过LuGre模型准确描述了系统工作过程中摩擦力的特性,进而推导出了系统的简化模型。采用神经网络方法获取电流与输出压力的关系,通过系统内部变量的观测值,构造了摩擦补偿因子,进而得出自适应滑模控制器。通过对目标位置的跟踪实验,对所设计方法的控制有效性进行了验证。验证结果显示,本文所设计方法能够控制电液伺服系统准确跟踪目标位置。
【关键词】电液伺服系统;位置跟踪;神经网络;自适应滑模控制器
【基金项目】江西省教育厅科技项目(GJJ191448)
中图分类号:TN92 文献标识码:A 文章编号:1673-0348(2020)019-053-03
Design and Simulation of Adaptive Position Control Method for Electro Hydraulic Servo System
XIiao Xiaochun Chen Zhicai
(Ji an vocational and Technical College, Jiangxi,ji an 343000)
Abstract: In order to improve the tracking effect of the electro-hydraulic servo system to the target position, this paper designs the adaptive position control method of the electro-hydraulic servo system. The flow equation of the system is deduced by the pressure of different chambers of the hydraulic cylinder. The dynamic equation of the hydraulic cylinder is established by using the displacement of the piston. The friction characteristics in the working process of the system are accurately described by LuGre model, and then the simplified model of the system is deduced. The relationship between current and output pressure is obtained by using neural network method. The friction compensation factor is constructed by observing the internal variables of the system, and then a self adaptive sliding mode controller is obtained. The effectiveness of the proposed method is verified by tracking the target position. The verification results show that the proposed method can control the electro-hydraulic servo system to accurately track the target position.
Key words: Electro hydraulic servo system; Position tracking; Neural network; Adaptive sliding mode controller
工業生产的高效化离不开自动化。为了使得生产更为高效,需要提高电液伺服系统的位置控制准确度。对此,电液伺服系统位置控制的研究具有重要作用。
文献中对电液伺服系统进行动力学分析后,采用PID算法设计了其位置控制策略,以实现对电液伺服系统的位置控制。文献中采用了基于反演控制方法的位置控制策略,对电液伺服系统的运动位置进行控制。由于其控制过程中缺乏对系统中摩擦力和外界干扰的控制,使得控制准确度不高。
对此,本文以神经网络控制方法为基础,通过系统内部变量的观测值构造摩擦补偿因子,构建了自适应滑模控制器,以实现对电液伺服系统进行自适应位置控制。
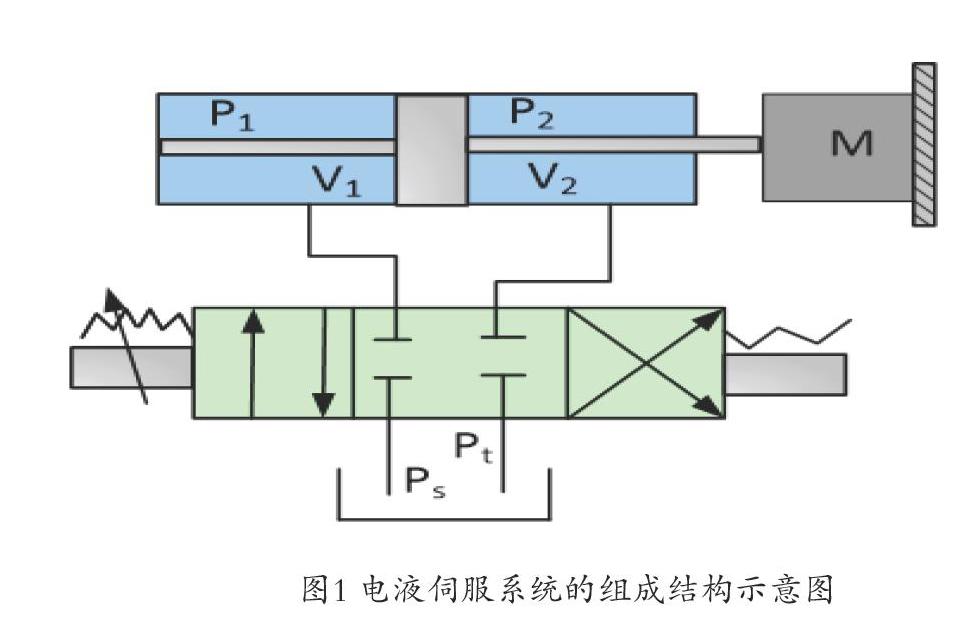
1. 电液伺服系统的模型分析
图1为电液伺服系统的组成结构示意图。从图1可见,其在结构上主要由液压缸、活塞等组成。
图1中,P1和P2为液压缸不同腔室的压力,V1和V2为其对应的容积。M代表外部负载,Pt和Ps分别代表供给和油箱压力。
在电液伺服系统中,由于P1和P2的作用,使得液压缸不同腔室产生了压差PL,此时系统的流量方程可表述为:
(1)
式中:qL为系统的流量,kd和分别为伺服阀的开口系数和面积梯度,sv为阀芯位移,为油品密度,sign(.)为符号函数,其表述为:
(2)
在腔室压差的作用下,腔室内的活塞将被推动,从而产生一定的位移sp,该过程液压缸的动力学方程为:
(3)
式中:B、K分别为负载的阻尼和弹性系数,Ap为活塞面积。
通过式(3)可得出系统流量方程的另一种表述方式:
(4)
式中:ep为系统泄漏系数,vt为液压缸总体积, 为体积模量。
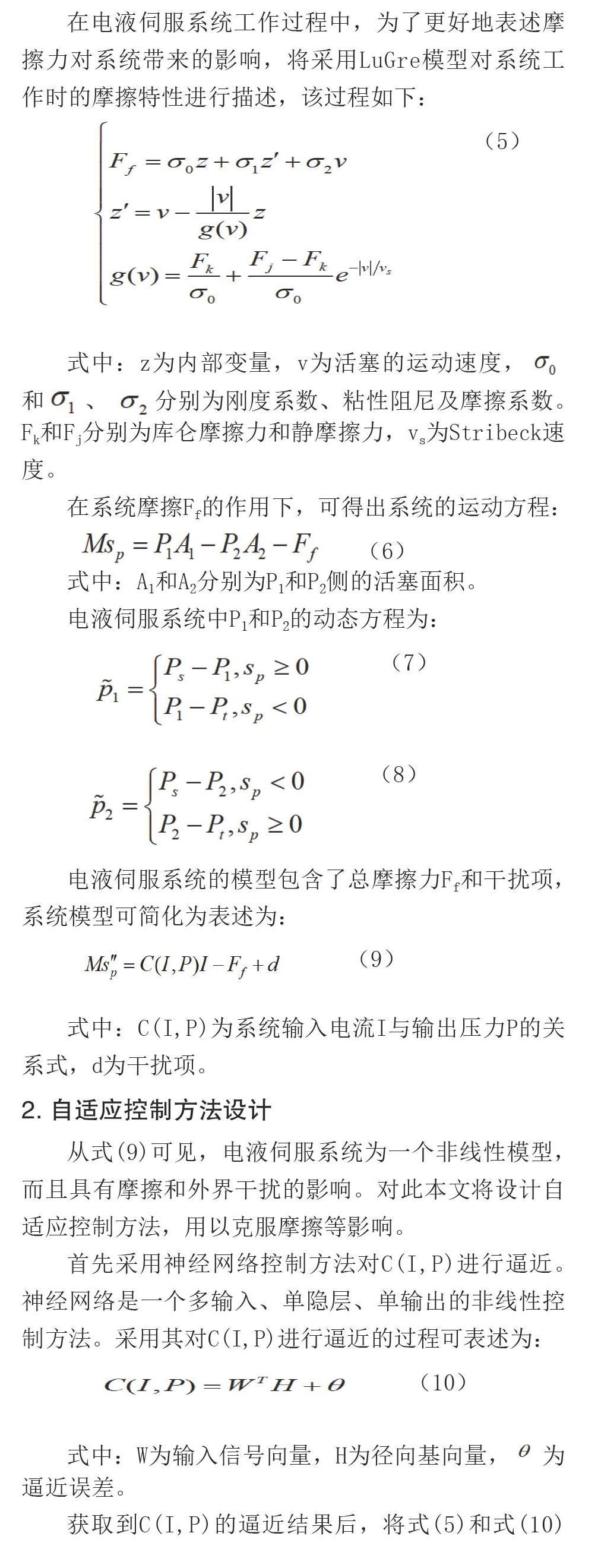
在电液伺服系统工作过程中,为了更好地表述摩擦力对系统带来的影响,将采用LuGre模型对系统工作时的摩擦特性进行描述,该过程如下:
(5)
式中:z为内部变量,v为活塞的运动速度,和、分别为刚度系数、粘性阻尼及摩擦系数。Fk和Fj分别为库仑摩擦力和静摩擦力,vs为Stribeck速度。
在系统摩擦Ff的作用下,可得出系统的运动方程:
(6)
式中:A1和A2分别为P1和P2侧的活塞面积。
电液伺服系统中P1和P2的动态方程为:
(7)
(8)
电液伺服系统的模型包含了总摩擦力Ff和干扰项,系统模型可简化为表述为:
(9)
式中:C(I,P)为系统输入电流I与输出压力P的关系式,d为干扰项。
2. 自适应控制方法设计
从式(9)可见,电液伺服系统为一个非线性模型,而且具有摩擦和外界干扰的影响。对此本文将设计自适应控制方法,用以克服摩擦等影响。
首先采用神经网络控制方法对C(I,P)进行逼近。神经网络是一个多输入、单隐层、单输出的非线性控制方法。采用其对C(I,P)进行逼近的过程可表述为:
(10)
式中:W为输入信号向量,H为径向基向量,为逼近误差。
获取到C(I,P)的逼近结果后,将式(5)和式(10)引入式(9)可得:
(11)
设计关于z的观测器:
(12)
式中:和为z的观测值,和为误差因子。
令为目标位置xe和实际位置x的差值,其表述为:
(13)
采用构造滑模函数:
(14)
式中:c为常数因子,且大于0。
采用和构造摩擦补偿因子:
(15)
联合滑模函数s和摩擦补偿因子Fbf构造自适应滑模控制器:
(16)
3. 仿真实验
采用MATLAB/Simulink軟件进行仿真实验。将本文设计的自适应滑模控制器与PID控制器用于对目标位置进行跟踪测试,以验证本文方法的优良性。
采用本文设计的自适应滑模控制器与PID控制器对随机目标位置进行跟踪,其结果如图2所示。
(a) PID控制器对随机目标位置的跟踪结果
(b)自适应滑模控制器对随机目标位置的跟踪结果
图2 自适应滑模控制器与PID控制器对随机目标位置进行跟踪结果
从图2(a)可见,PID控制器对随机目标位置的跟踪结果中,跟踪位置多次偏离了目标位置,且在目标位置产生变化时,跟踪位置就会出现较大的偏离,偏离后需要多次调整才能再次跟踪到目标位置上。从图2(b)可见,自适应滑模控制器对随机目标位置的跟踪结果中,虽然跟踪位置也会偏离目标位置,但偏离的次数较少,在产生偏离后,能够较快的再次跟踪到目标位置。由此可见,本文所设计自适应滑模控制器对目标位置的跟踪效果较为优秀。
4. 结论
本文根据电液伺服系统的特性,在神经网络控制方法的基础上,提出了电液伺服系统的自适应位置控制方法。通过位置跟踪实验可知,本文方法对目标位置的跟踪效果较好,为电液伺服系统实现准确的目标位置跟踪提供了保障。
参考文献:
[1]ZhangL,WangL,LiY.AnalysisandExperimentalStudyonClosed-loopStiffnessofHydraulicServoSystem[J].JournalofMechanicalEngineering,2018,54(16):170-177.
[2]ZhangBinglan.ApplicationofImprovedGeneticAlgorithmPIDControllerinElectro-HydraulicServoSystem[J].ProcessAutomationInstrumentation,2017,38(8):28-32.
[3]HaiBoYuan,HongCheolNa,YoungBaeKim.RobustMPC-PICforcecontrolforanelectro-hydraulicservosystemwithpurecompressiveelasticload[J].ControlEngineeringPractice,2018,79:170-184.
[4]ZhenghaiTang,ChengfengZhang,QiuyanWei.PositionTrackingControlLawforanElectro-HydraulicServoSystemBasedonBacksteppingandExtendedDifferentiator[J].IEEE/ASMETransactionsonMechatronics,2018,23(1):132-140.
[5]YangSiyang,HanJiang,ZhangKuibang.ARobustAdaptiveBacksteppingControlMethodforElectro-HydraulicPositionServoSystems[J].AppliedMathematicsandMechanics,2017,38(6):676-684.
[6]WangX,WangS.Newapproachoffrictionidentificationforelectro-hydraulicservosystembasedonevolutionaryalgorithmandstatisticallogicswithexperiments[J].JournalofMechanicalScienceandTechnology,2016,30(5):2311-2317.
猜你喜欢
客联(2022年3期)2022-05-31
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2021年2期)2021-11-10
西部交通科技(2021年9期)2021-01-11
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
