基于PP-RTX 技术的机载POS 定位精度分析
2020-10-22 01:13:30杨国柱王和平叶剑锋
导航定位学报 2020年5期
杨国柱,王和平,邹 彪,胡 伟,刘 宁,叶剑锋
(国网通用航空有限公司,北京 102219)
0 引言
事后实时扩展( post-processed real-time extended,PP-RTX)技术是基于美国天宝(Trimble)公司实时差分扩展技术(real-time extended, RTX)[1]开发的1 种高精度后处理RTX 处理方法,该方法采用安置在运动载体上的单台全球卫星导航系统(global navigation satellite system,GNSS)双频接收机,接收GNSS 数据,任务完成后从实时轨迹中派生出压缩轨迹上传至RTX 服务器中,检索下载1 组精确的卫星改正数据(轨道、时钟和系统偏差)组成的数据集,基于非差载波相位观测值对动态载体进行高精度定位。
定位定姿系统(positioning and orientation system, POS)[2]集GNSS 定位、惯性测量技术于一体,可直接获取航摄相片的外方位元素,能大幅降低航测外业控制点[3]。当前,POS 后处理主要基于流动站和基准站[4]间的差分,其定位精度与流动站和基准站之间的距离有关,当站间距离增大到一定程度后,站间的各项误差源不能保证空间上的相关性,导致定位精度下降[5]。在我国一些偏远地区、无人区,布设地面GNSS 基站较困难且耗时费力,造成了这些地区地理空间数据更新速度较慢。
PP-RTX 对GNSS 数据的解算不需要地面基站的支持,而且定位精度均匀,可解决POS GNSS 载波相位差分技术中需要架设基站成本高、流动站与基准站间距离增加导致定位精度降低等2 大问题,为大范围高精度的事后航摄定位解算提供新的解决方法。
本文在中国不同地域进行直升机航摄实验,通过获取的航迹信息对比分析PP-RTX 和多(单)基站差分定位精度,为航摄生产实践提供参考。
1 基于PP-RTX 技术的POS 系统定位原理
1.1 PP-RTX 技术
1.1.1 美国Trimble 公司的RTX 技术
Trimble RTX 实时差分扩展技术是Trimble 公司开发的1 种定位技术,是1 种创新的多频GNSS定位技术,它将基于参考站的差分全球卫星导航系统的高精度与全球卫星校正的高效广域覆盖相结合,能够在不采用基准站、电台或网络参考站的情况下,实现厘米级精度的GNSS 定位服务[6],技术原理如图1 所示。

段图1 Trimble RTX 定位原理
Trimble RTX 监测网络由分布在全球的大约100 个高性能GNSS 接收机组成,Trimble RTX 跟踪站分布如图2 所示。这些接收机记录全球定位系统(global positioning system, GPS)、格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)、北斗卫星导航系统(BeiDou navigation satellite system, BDS)、伽利略卫星导航系统(Galileo navigation satellite system, Galileo)和日本准天顶卫星系统(quasi-zenith satellite system, QZSS)的卫星导航数据。网络中各站点的数据不断传输到Trimble 公司全球各地的数据处理中心。处理中心持续监控全球参考站的运行状况,并在检测到问题时自动重新配置网络;然后,网络处理器以1 Hz 的速率为地球上的任何位置生成精确的轨道、时钟和系统偏差数据;最后,将压缩测量记录(compact measurement record,CMR)格式精确数据,通过卫星和互联网实时传输,并将其记录到数据库中,以供后处理应用程序使用。
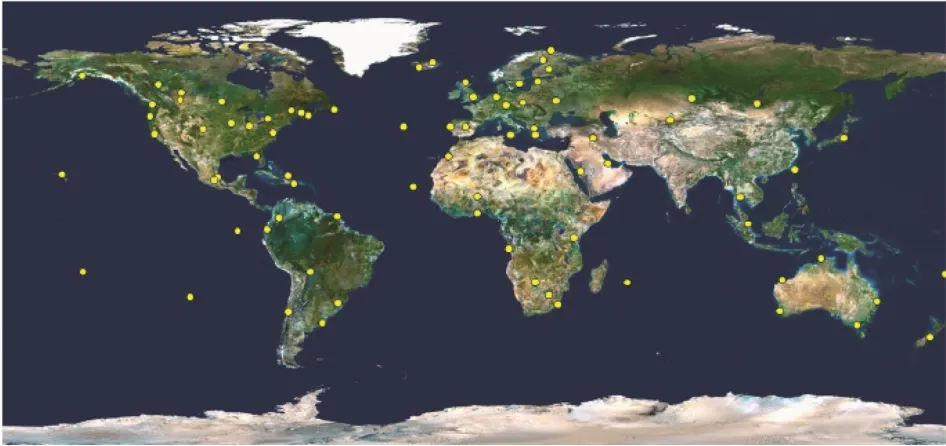
图2 Trimble RTX 跟踪站分布
1.1.2 PP- RTX 技术原理
PP-RTX 技术是利用GPS、GLONASS、BDS和QZSS 等系统卫星的双频伪距和载波相位测量计算得到最终结果。接收机到指定卫星的双频伪距和载波相位测量计算简易方程[7]为:
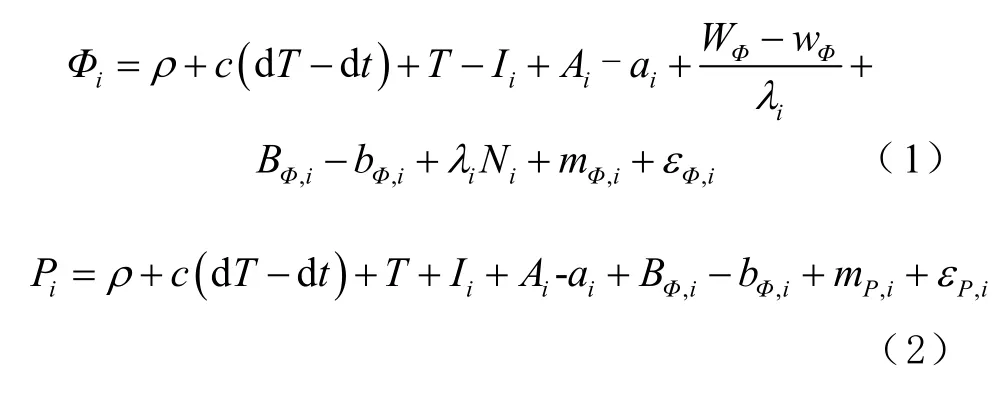
式中: Φi为载波i 测相伪距观测值,单位为m; Pi为载波i 的测距码伪距观测值,单位为m;ρ 为卫星到接收机间的真实的几何距离,单位为m;c 为真空的光速,单位为m/s;dT 为接收机的钟差,单位为s;dt 为卫星的钟差,单位为s;T 为对流层延迟; Ii为载波i 的电离层延迟; Ai为载波i 的接收机位置偏移; ai为载波i 的卫星位置偏移; WΦ为接收机天线相位叠加;wΦ为卫星天线相位叠加;BΦ,i为接收机载波i 的相位偏差; bΦ,i为卫星载波i的相位偏差; λi为载波i 的波长; Ni为载波i 的整周模糊度;mΦ,i为载波测相多路径效应;εΦ,i为载波测量误差及残差; mP,i为伪距测量的多路径效应;εP,i为伪距测量误差及残差。
从RTX 服务器接收精确的卫星时钟和轨道信息,用于消除卫星钟差和卫星位置误差,在计算卫星时钟、轨道以及定位时使用卫星和接收机天线校正、固体潮、海潮加载效应、相对论修正、相位叠加、卫星编码和载波相位偏差高精度的模型,以进一步减少相位测量中的误差。
在应用精确时钟、轨道和模型数据后,测量中的误差分量主要是电离层和对流层延迟、接收机时钟误差、接收机偏差、多路径效应、相位整周模糊度。PP-RTX 定位处理器使用卡尔曼滤波计算模糊度,计算和减小接收机钟差和接收机偏差;通过载波的“电离层自由”组合消除定位中的1 阶电离层延迟误差;通过对流层延迟预报模型减小对流层延迟误差;在卡尔曼滤波器中建模和估计观测时存在的温度、压力和水蒸气等因素导致的残差,用经验数据集优化误差模型以实现高精度的机载动态测量。
改正以上误差后,根据当地电离层模型的可用情况和可观测数据的质量,PP-RTX 定位收敛到最终正确的模糊度时间从不到1 min 到超过15 min不等。然而,由于PP-RTX 通过正向和反向计算,最终输出是2 者的结合,只要任务本身超过45 min且没有丢失卫星信号(如在飞机上的应用),最终的解决方案是完全收敛的。
1.2 POS 定位
POS 集惯性导航与卫星导航技术于一体,记录动态载体空间位置及姿态信息,并采用多信息融合技术分别对POS 数据进行实时与事后处理,获得高精度定位定向信息[8]。
卫星导航技术是基于无线电导航定位系统,具有持续提供高精度定位、速度和时间信息,基本不受地域、时间限制的优点,但存在数据采样率低、抗干扰能力差、信号遮挡等缺点。惯性导航基于微型惯性测量装置(miniature inertial measurement unit,MIMU),利用惯性元件(陀螺仪、加速度计)测得移动目标的位置、速度和姿态,但存在使用前初始对准时间较长、随时间积累传感器定位误差发散等缺点。POS 集卫星导航和惯性导航优势于一体,实现GPS/IMU 组合,使整体性能远远优于各自独立的系统。
1.3 PP-RTX 与POS 数据融合
PP-RTX 服务通过访问互联网,从实时轨迹派生出的压缩轨迹上传到RTX 服务器中,用于检索1 组RTX 服务的轨道、时钟和局部附加偏差信息组成的数据集(飞行任务结束1 h 内可获得),然后与POS 数据结合进行紧耦合解算,PP-RTX 与POS 数据融合工作流程如图3 所示。
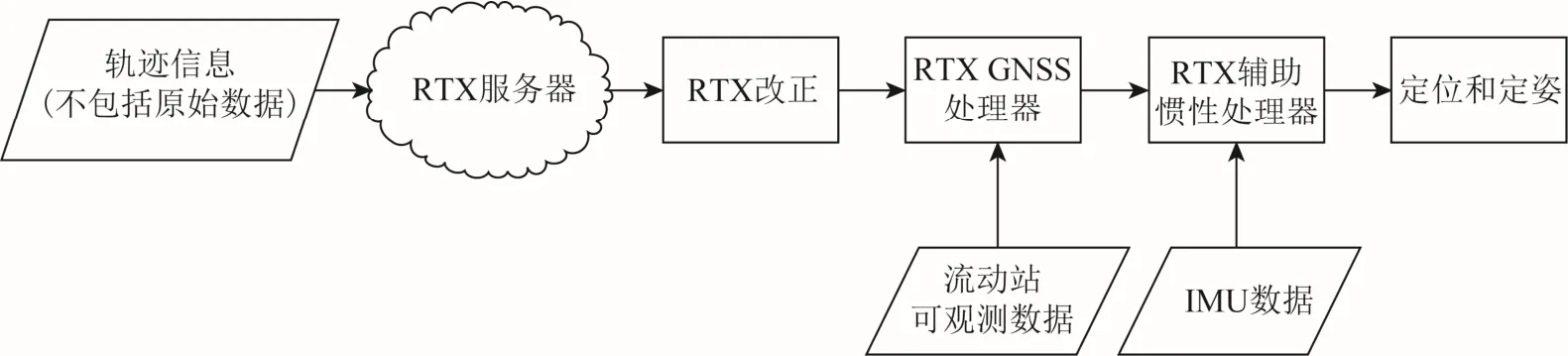
图3 PP-RTX 与POS 数据融合工作流程
2 实验与结果分析
2019 年2 月—6 月,在吉林省、甘肃省、新疆维吾尔自治区、安徽省、湖南省、福建省、四川省等7 省区进行9 个架次的直升机航摄实验,对POS得到的GNSS 数据进行PP-RTX 和多基站事后差分定位解算分析。
2.1 测区概况
实验区分布在我国东北、西北、中部、东部、南部,地形以丘陵和山区为主,地势起伏较大;基准站选用均匀布设且覆盖整个实验区的省级连续运行参考站。实验时GNSS 信号采样频率为2 Hz,采样卫星高度截止角为10°。图4 为甘肃省某1 架次的飞行轨迹及连续运行参考站(continuously operating reference stations, CORS)站分布图,其中曲线为飞行航迹,空心圆为该架次基准站分布位置。
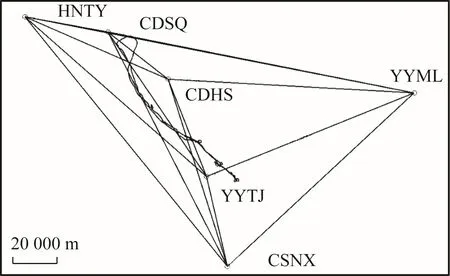
图4 甘肃地区飞行轨迹及基准站布设
2.2 惯导系统
实验采用的是Trimble 公司的AP60 惯性导航系统,参数如表1 所示,GNSS 接收天线为Trimble AV-37,GNSS 信号采样频率为2 Hz,采样卫星高度截止角为10°,IMU 采样频率为200 Hz。
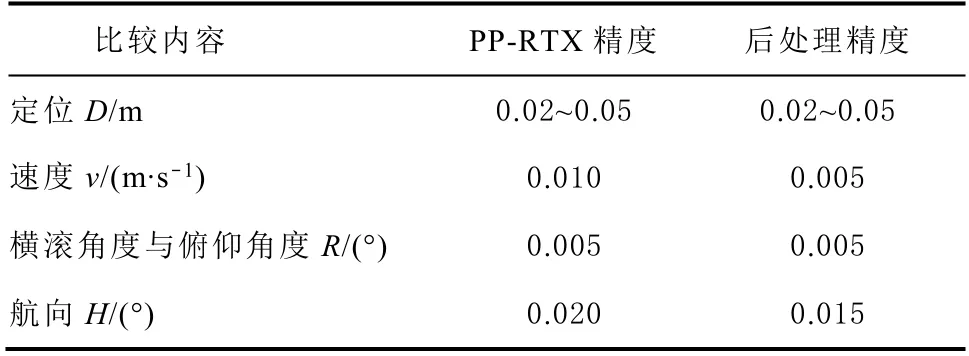
表1 AP60 系统参数
2.3 数据解算环境
轨迹解算采用阿普拉尼克斯(Applanix)公司的POSPac MMS8.1 软件。多(单)基站事后差分解算采用该软件SmartBase(SingleBase)解算模式,所需数据采用国际GNSS 服务组织(International GNSS Service, IGS)提供的各架次当天的广播星历、各架次当天及前后1 d 的最终精密星历文件、系统性偏差文件、采集的连续运行参考站记录的数据;PP-RTX 解算采用POSPac 软件;坐标转换为2000国家大地坐标系(China geodetic coordinate system 2000,CGCS2000)坐标系时,采用POSPac 软件。
2.4 PP-RTX 定位精度分析
将PP-RTX 和多基站差分解算后的轨迹数据,按采样间隔2 Hz 输出CGCS2000 坐标系下的点位坐标,坐标系具体为6°带的高斯投影,高程为椭球高。本文以多(单)基站事后差分解算数据作为真值,多(单)基站事后差分在站间距离小于70(30)km 时,定位精度在3~10 cm[9-14],对比同1 个历元PP-RTX 与多(单)基站解算的点位坐标在北(N)、东(E)、高程(U)差值平均值、标准差、均方根差,结果如表2 所示。
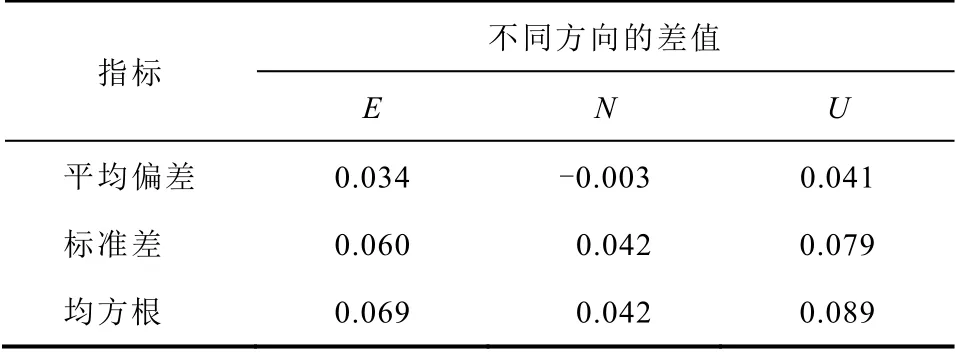
表2 P-RTX 与多(单)基站事后差分在 N、E 及U 方向上的差值 单位:m
图5 为9 架次每个历元PP-RTX 与多(单)基站事后差分解算结果在N、E、U 方向上的差值;图6 为9 个架次采用多(单)基站时,航空器各个历元距基站距离;图7 为9 个架次各个历元所观测到的卫星数及其所对应的位置精度衰减因子(position dilution of precision, PDOP)值,除第9 架次航空器落地后,PDOP 较大外,9 架次观测期间观测卫星个数及卫星几何图形强度均能满足观测要求。
对比同1 个历元2 种定位模式解算坐标,在我国不同区域不同地势环境下,基于PP-RTX 技术的机载POS 定位相对于多(单)基站事后差分定位解算结果,在水平方向、高程方向可以达到9 cm以内的精度,空间定位精度在12 cm 以内。
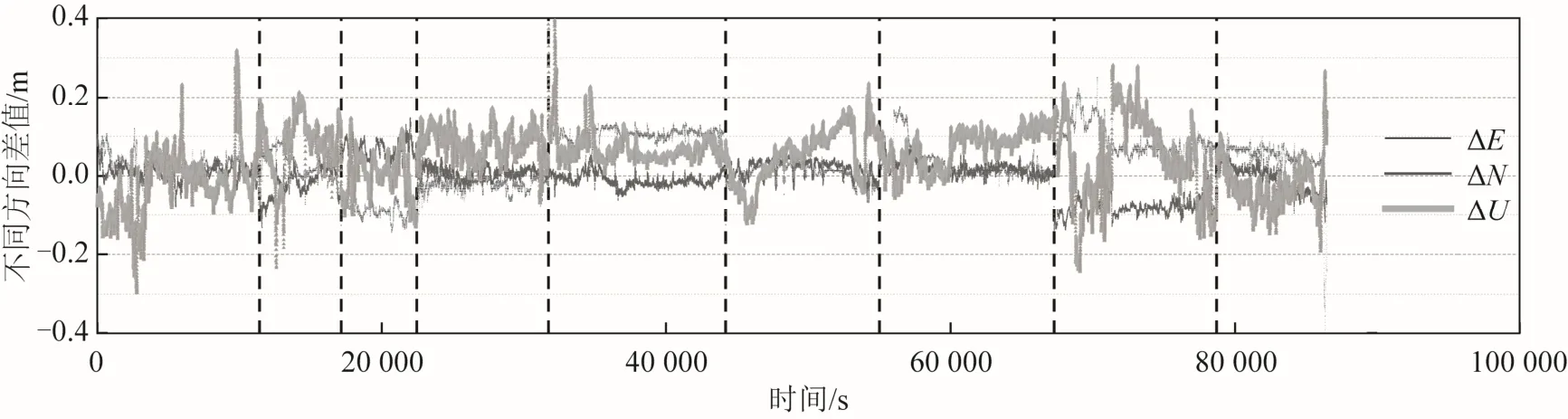
图5 PP-RTX 与多(单)基站事后差分解算结果在N、E 及U 方向上的差值
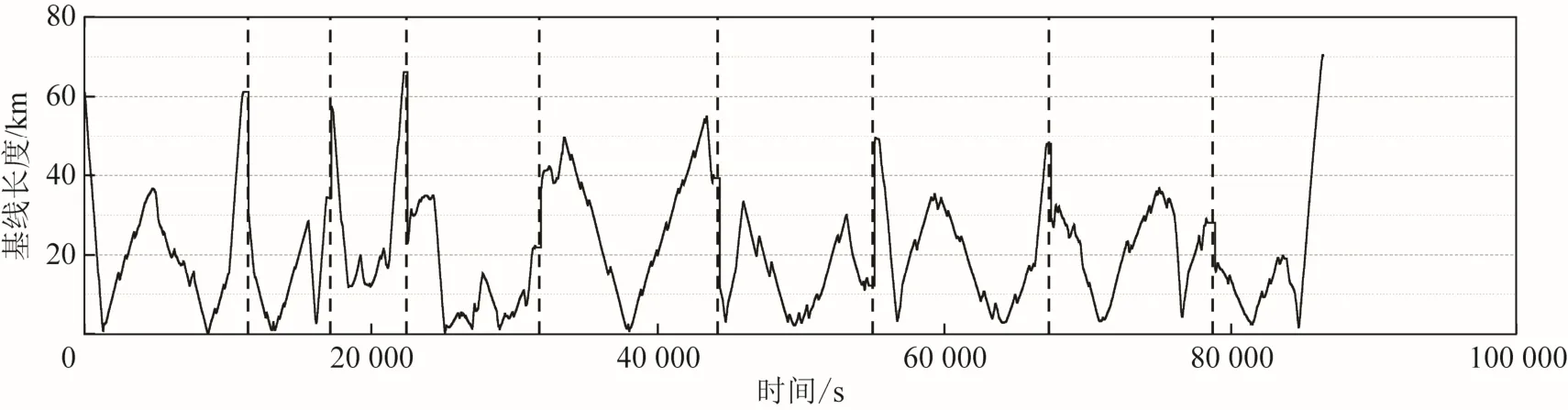
图6 航空器距基站距离
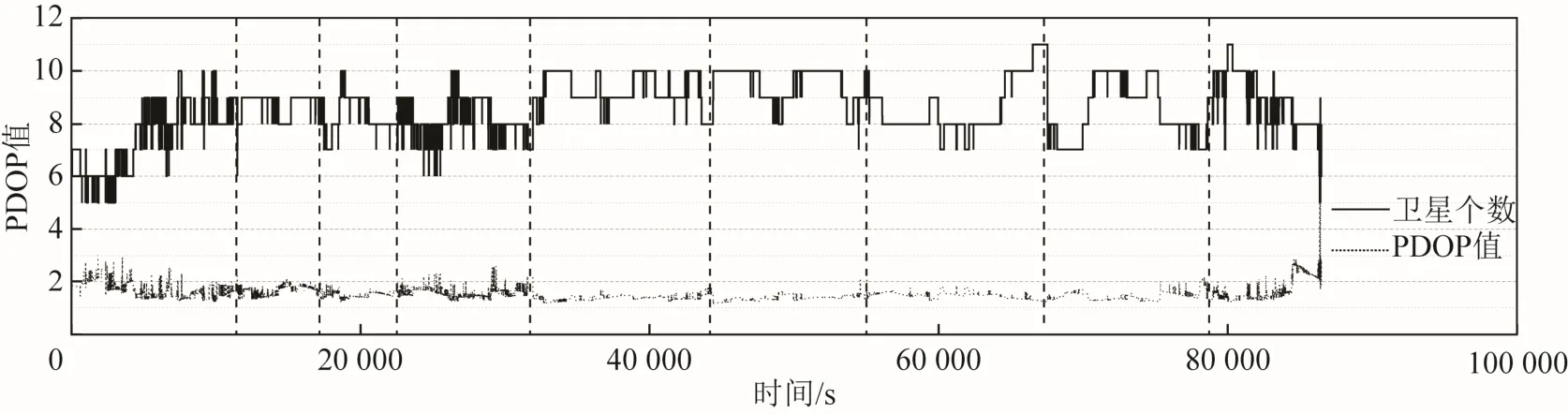
图7 观测卫星数及对应的PDOP 值
当流动站距基站距离超过30 km 时,2 种模式同1 历元坐标差值明显增大;由此可知大范围区域作业时,PP-RTX 稳定性更可靠;当使用基站时,随流动站与基准站之间距离增加,定位精度降低,超过30 km 时,站间的各项误差源不能保证时间和空间上的强相关性。
3 结束语
随着POS 系统快速发展,快速、高精度地进 行事后解算是其中需要解决的1 大难题。当使用基站进行事后差分时,解算精度与流动站、基准站之间的距离有关,当站间距离增大时,解算精度降低。通过基于PP-RTX 技术和多(单)机载POS 定位试验,对比同1 个历元2 种定位模式解算坐标,可以得出PP-RTX 技术能满足大范围航摄定位精度的要求,在航摄结束后即可进行航摄后处理解算,大大提高了时效性,为大范围、无地面基站航摄事后定位解算提供了参考。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年6期)2018-11-25 09:50:18
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
西部广播电视(2015年10期)2016-01-18 04:01:45
电测与仪表(2014年15期)2014-04-04 12:05:32
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49