城市道路平面交叉口公交优先智能信号控制系统研究
2020-10-21 08:45:44薛艳青
交通工程 2020年5期
薛艳青
(临沂市规划建筑设计研究院,临沂 276000)
1 问题的提出
城市道路交叉口是交通车辆不断地分流、合流及交叉的场所,是交通网络中的瓶颈,交通拥堵问题突出.通过提高公共交通在交叉口处的运行效率,可提高整个交叉口的通行能力、缓解城市道路交通拥堵问题.
城市平面交叉口也是一个比较复杂的车辆排队服务系统.在道路结构条件一定的情况下,如何采用信号配时智能控制的方法,提高交叉口的通行效率,一直是城市交通领域关注的课题.
基于公交优先信号控制策略,利用VB编程,建立了基于交叉口四相位控制的公交优先智能交通信号控制系统仿真模型,并进行了交叉口处时间通行权公交优先系统仿真实验.在实验中利用计算机模拟技术[1],建立了包含有车辆跟驰模型、车辆检测模型和信号控制模型等微观交通仿真模型,并采用VB编程设计开发了仿真实验软件系统.在相同的车辆和道路条件下,分别进行公交优先的智能交通信号控制方式以及定时信号控制方式的仿真试验并进行结果分析.结果表明:在交叉口处利用信号控制实现时间通行权的公交优先,对于减少交叉口处的公交车辆延误以及提高公交车到达的准时性具有显著的作用,对于提高信控路口的通行能力,缓解城市交通压力具有显著效果[6].
2 信号控制策略
城市道路平面交叉口公交优先技术一般有2种类型,一是在交叉口布设公交专用道来实现空间上优先通行权;二是在交叉口设置公交优先信号配时实现时间上优先通行权[6].本文主要是采用公交优先信号控制策略,来实现时间优先通行权的公交优先[2].在交叉口处让公交车优先通行,提高公交车的到达准时性,在其他社会车辆利益稍有损失的基础上,实现交叉口人均社会利益最大化.
结合我国交叉口的信号控制特点,本文采用主动优先控制模式.即通过优先车辆检测装置识别分析公交车辆运行情况,检测到公交车即将到达后,采用绿相位调用策略,主动适应、合理确定信号配时.若公交车在红灯状态时到达,这时缩短当前绿灯时间,使公交车到达交叉口时显示绿灯,可顺利通过,并设置合理的最小绿灯时间,保证公交优先的同时又能实现系统的优化.
主动式公交优先信号配时控制模式主要由公交车辆检测、优先决策判断、优先信号配时方案执行等3个功能模块组成[3].具体工作流程如图1所示.
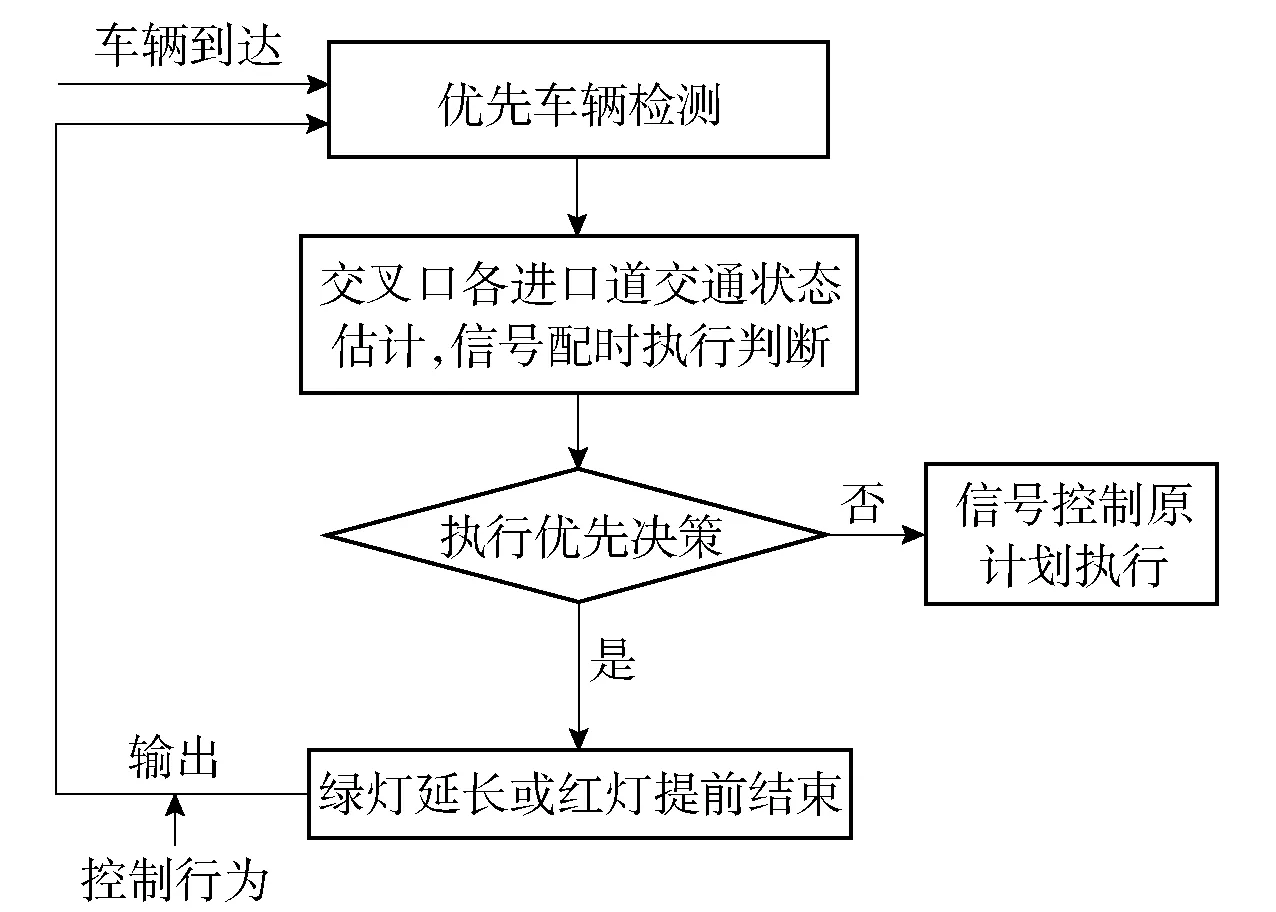
图1 主动式公交信号优先控制流程[4]
3 智能信号控制系统的构架
四相位信号配时方案:第1相位南北左转,第2相位南北直行,第3相位东西左转,第4相位东西直行,所有右转车辆均不予控制,其信号配时方案如图2所示.
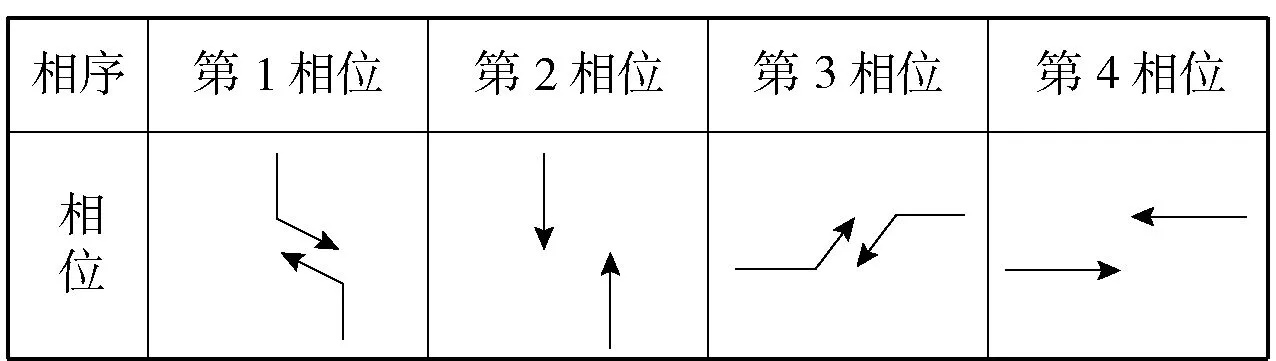
图2 四相位控制方案
交叉口四相位控制的智能信号控制系统包括车辆检测器、公交车辆检测与定位系统、智能交通信号控制器、通信系统和控制中心等5部分[7-8].
3.1 车辆检测器
在交叉口各进口车道上设置环形线圈车辆检测器,对交叉口范围内所有车流量进行检测.设置于停止线处的线圈检测到车辆通过停止线后,进口车道排队车辆数减少一辆;设置于停止线前100 m处的上游感应线圈检测到车辆进入交叉口范围内后,进口车道排队车辆数增加1辆.由此计算出各进口车道上的排队车辆数,作为智能决策模块的输入信息,用于交叉口信号状态的实时决策[10].
3.2 公交车检测与定位系统
公交车的检测与定位主要包括公交车上的车载移动单元(即信号发射装置)和设置于公交站点处、路段间隔处以及临近交叉口范围处的固定单元(即信号标杆).其具体工作流程如图3所示.

图3 公交车检测与定位系统工作流程
3.3 智能交通信号控制器
智能交通信号控制器的预处理模块对不同时刻的车流量信息和公交优先级信息进行处理,分别获得绿灯的转换度和红灯的急切度,然后将此信息输入模糊推理系统,通过推理得到1个输出:延长绿灯或提前结束红灯时间.当绿灯启动时,信号控制器确定一个能满足刚起步的机动车以及非机动车和行人顺利通过交叉口的最小绿灯时间.即将结束最小绿灯时,控制器进行决策操作,获得切换的相位状态,或者下一刻的绿灯延长时间.其工作过程如图4所示.
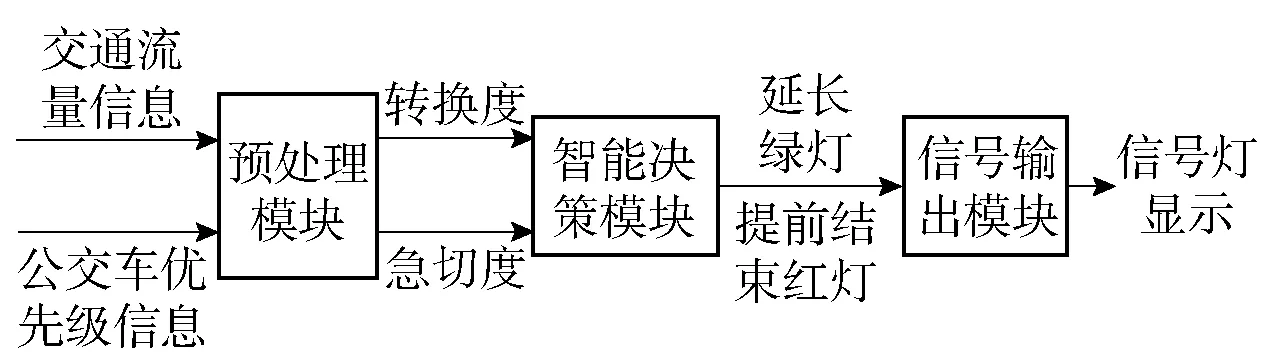
图4 智能信号控制器工作流程
3.4 通信子系统
通信子系统通过有线(电缆或光缆)或无线通信网链路实现子系统与子系统以及控制中心与子系统的通信.
固定单元与控制器单向通信:固定单元将处理后的公交车辆的相关信息发送给控制器.
固定单元与控制中心双向通信:①固定单元向控制中心发送处理后的公交车辆的相关信息;②控制中心向公交站的固定单元发送已经处理后的公交车位置信息,该信息以电子站牌的形式显示.
控制器与控制中心双向通信:①控制器向控制中心发送路口的交通流量信息以及实时信号相位控制信息;②控制器更新数据通过控制中心来完成.
3.5 控制中心
控制中心是整个信号控制系统的大脑,子系统与子系统实现集成,与其他公共系统建立了联系与集成.控制中心通过对固定单元对车辆的识别信息的查询实现对车辆的准确定位,根据对同一车辆接收不同数据包的时间信息,判别得到最新的数据,并不断地对车辆定位信息进行更新.
交叉口公交优先智能信号控制系统的实现原理如图5所示.

图5 交叉口公交优先智能信号控制系统工作原理
4 实例仿真分析
以青岛开发区阿里山路无公交转弯的交叉口为例,进行了系统仿真实验与分析.利用vb编程语言设计交通仿真系统,利用计算机模拟技术,建立仿真模型.模拟相同的交通流量、不同配时方案(定时控制和公交优先智能控制)条件的交通状况,由此来判断公交优先控制系统能否真正意义上实现时间通行权上的公交优先.
4.1 问题描述
仿真交叉口路况:各进口道共3条机动车道,其中直右车道1条,直行车道1条,左转车道1条,各车道宽度均为3.5 m,无中间分隔带,一般路段限制速度为40 km/h,信号配时方案采用四相位.根据现状交通量调查统计,各进口道车辆组成比例如表1所示,高峰小时各转向交通流量如表2所示.
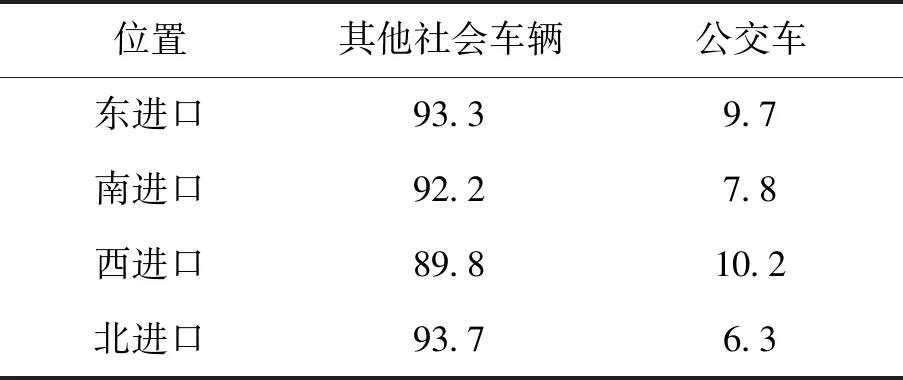
表1 各进口道车辆组成 %
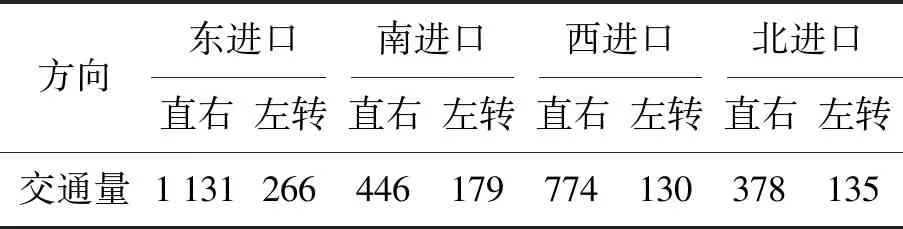
表2 各进口道高峰小时交通量
4.2 交通仿真建模
4.2.1 车辆检测模型
车辆检测模型主要完成对所有车辆的检测以及对公交车的检测.
对所有车辆的检测主要通过安装于每个进口车道的环形感应线圈检测器来实现,环形感应线圈分别设置于各进口车道的停止线处以及设置于上游距离停止线100 m处,车辆检测线圈的具体设置如图6所示.
交叉口每个进口车道的仿真区域为上游检测器至停止线范围,详见图6所示的矩形区域.仿真的开始点为上游距离停止线100 m处的线圈检测器处,每检测到该断面通过1辆车,进口车道排队数增加1辆;仿真终止点为停止线线圈检测器处,每检测到该断面通过1辆车,进口车道排队数减少1辆.
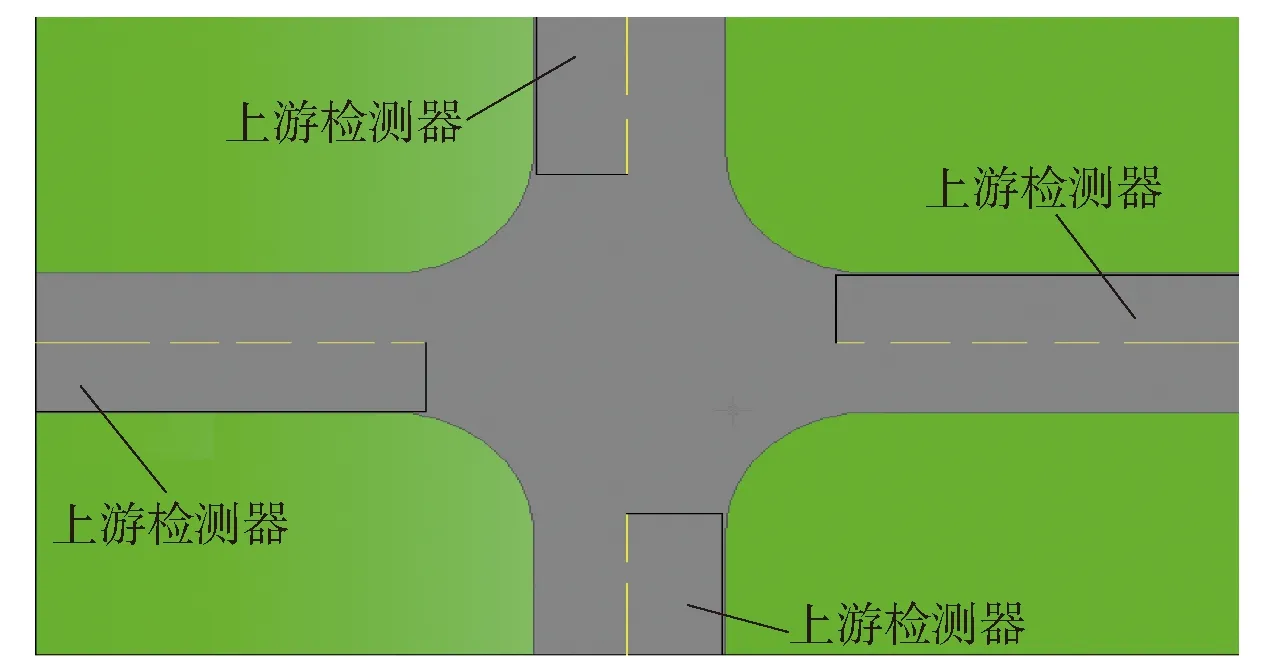
图6 检测器安装位置
为了简化仿真模拟过程,公交车优先级预先设定完成,将控制器第1步预处理计算进行了省略.同时,由于只针对1个交叉口进行仿真,公交车的位置对仿真的影响不明显,所以省略了对公交车的定位模块,只保留了公交车的检测模块.
4.2.2 车辆跟驰模型
在交叉口范围内,车辆跟驰主要包括减速停车过程、车辆启动加速过程以及匀速行驶过程,主要完成对车辆排队和消散过程的动态模拟.
在跟驰模型中,为了简化计算假设所有车辆交叉口范围均以30 km/h(即8.3 m/s)的速度行驶.减速停车时,假设车辆总是以最大减速度-0.5 m/s2从8.3 m/s的车速一直减到零;启动时,假设车辆总是以最大加速度0.5 m/s2加速至8.3 m/s,再以该速度匀速行驶.
1) 减速停车过程
由实测可知,进口车道排队车辆平均间距约为1.5 m.红灯或黄灯时,车辆先确定减速开始位置,该位置前车辆匀速行驶,经过该位置后,车辆以-0.5 m/s2的减速度开始减速,直至速度为零.
2) 启动加速过程
绿灯初期,进口车道排队车辆按顺序依次启动,第1辆排队车辆在刚启动绿灯时即刻启动,以最大加速度加速至8.3 m/s后匀速行驶.由于后车受前车的影响,后车司机需要有足够的反应时间以及后车在足够的时间内才能启动,因此会产生启动延迟.在仿真过程中,启动延迟采用伪随机数动态分配延迟时间,取0.8~1.6 s.
3)匀速行驶过程
绿灯期间,进口车道无排队现象,车辆以8.3 m/s的速度匀速畅通行驶,直至驶离仿真区域.
4.2.3 交通信号控制模型
系统中设置了定时信号以及公交优先智能交通信号控制器,用于不同信号配时方案情况下的交通分析.
方案1,四相位定时信号控制方案:信号周期为110 s,全红时长为2 s,黄灯时长为3 s.相位1:南北向左转,绿灯时长为13 s;相位2:南北向直行,绿灯时长为17 s;相位3:东西向左转,绿灯时长为20 s;相位4:东西向直行,绿灯时长为40 s.
方案2,四相位公交优先智能信号控制配时方案:仿真交叉口无转弯公交车,绿灯时间实时调整,控制器按照实时交通流量以及公交优先信息对直行绿灯时间进行延长或提前结束红灯.在延长绿灯时间时,最长绿灯时间假设南北直行30 s,东西直行50 s;在缩短红灯时间时,最短绿灯时间假设为15 s.
4.3 仿真程序设计
运行仿真过程:①仿真前:选择信号控制配时方案,设定仿真演示速度以及总的仿真时间;②仿真程序运行中,可通过运行、继续、暂停等按钮控制仿真过程;③通过退出按钮结束仿真程序.
仿真中,仿真步长设置为0.1 s.每个仿真时间步长内主要完成以下任务:①相位信号处理:判断什么时刻进行仿真相位切换,或者判断什么时刻进行下一次延长绿灯,并执行相关操作;②车辆扫描:按照对每个车道上车辆的扫描情况以及该信号状态下的跟驰动作的执行情况,实现对0.1 s后每辆车的位置进行定位;③动画显示:显示车辆新的位置,显示信号灯更新后的状态以及相应的时间.程序对每个仿真时间步长的动作不断地进行重复执行,直至仿真结束或暂停或停止.
仿真程序的用户界面如图7所示.

图7 交通仿真程序的用户界面
仿真开始前,设置相关的仿真参数,设置参数及红绿灯信号配时方案如图8所示.
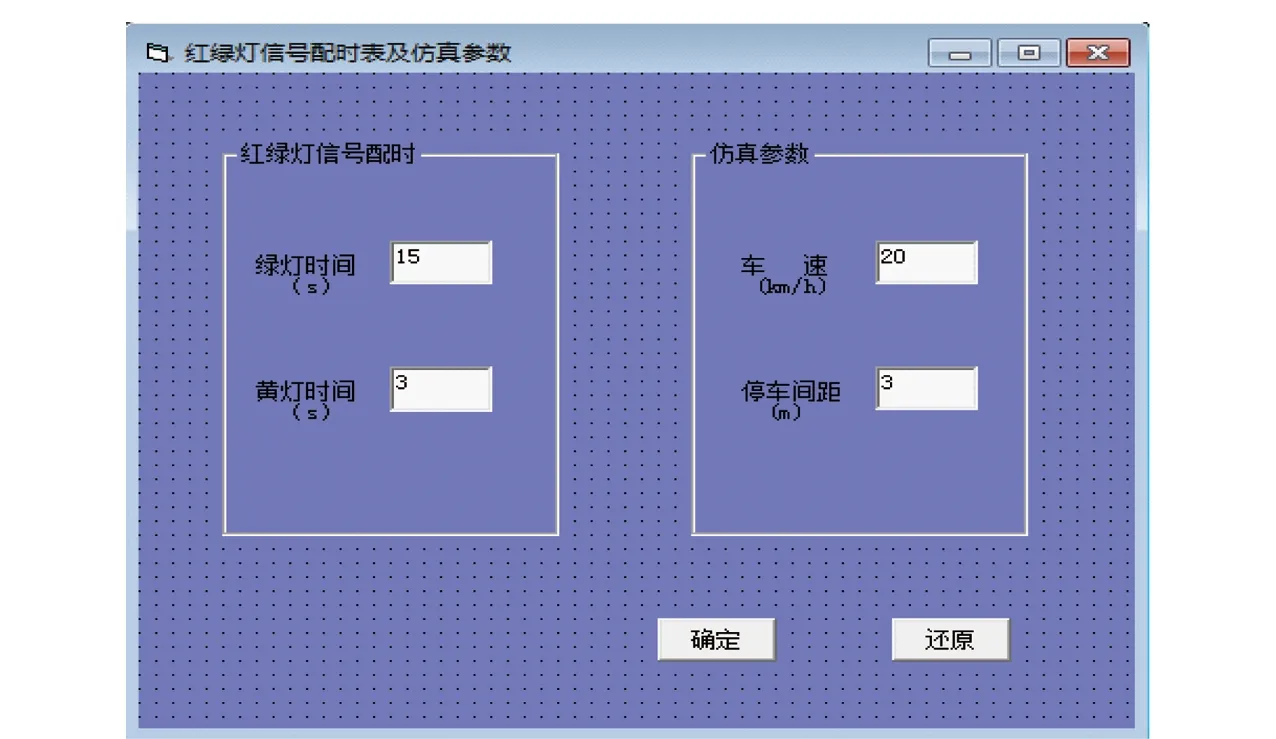
图8 信号配时及仿真参数表
4.4 仿真实验
分别对以上2种信号控制配时方案进行仿真实验[5].由于仿真初始阶段交通流不稳定,因此需要采用一个较长的仿真时间用于提高仿真精度,本次仿真时间设定在20 min以上.
4.5 结果分析
为了提高仿真的精确度,仿真运行时段为0~2 000 s,其中路网初始化时间为200 s,数据采集时段为200~2 000 s.
在仿真过程中,当检测到公交车时,通过延长绿灯时间或缩短红灯时间来实现公交车时间通行权的优先.2种方案的仿真分析结果如表3所示.

表3 交叉口公交优先实施前后仿真结果汇总
从表3可看出:实行公交优先的智能信号控制方式后,公交乘客平均延误时间减少28.26%,所有车辆的平均延误时间减少12.83%,交叉口平均排队长度减少22.41%.由此可见,交叉口处的公交延误明显降低,提高了公交车辆调度的准时性.
5 结束语
通过对不同信号控制方式的仿真结果分析,交叉口公交优先智能信号控制配时方案实现了公交车时间通行权的优先,提高了公共交通的通行效率,降低了公交车的延误以及交叉口处的排队长度.将交叉口的交通组织渠化设计与智能信号控制方式相结合,能大大提高交叉口的通行能力,缓解城市道路的交通拥堵问题.
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
商周刊(2018年25期)2019-01-08 03:31:08
传媒评论(2018年5期)2018-07-09 06:05:26
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
中国卫生(2016年12期)2016-11-23 01:09:52
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01
小说月刊(2014年12期)2014-04-19 02:40:08
河南科技(2014年14期)2014-02-27 14:12:02