自动驾驶技术避障策略及新技术的融合
2020-10-20 06:20雷先华戴安妮陈宇奇
汽车与驾驶维修(维修版) 2020年9期
关键词:前景展望
雷先华 戴安妮 陈宇奇

关键词:自动驾驶技术;避障策略;技术融合;前景展望
0 引言
自动驾驶车辆,即不依赖于驾驶者进行人为控制,主要通过传感器技术及设备等来获取道路环境信息并以此为依据采取相应举措,从而实现对其运动自动控制的智能车辆。其所运用的自动驾驶技术不仅能保障行驶的稳定性、动力性,同时也能控制车辆足够精确地行驶于期望路径[1]。
随着人工智能和车辆技术的应用与发展,路径控制问题作为自动驾驶技术的关键难点,由于其复杂性和重要性,成功吸引了学术界与工程界人士的广泛重视[2]。优良的避障路径规划能够引导自动驾驶车辆安全平稳地避开障碍物、具有较高的体验舒适性 [3],自动驾驶技术助力于改变人们的出行生活方式,使其携同专业化、智能化、人性化兼具发展。
本文主要对自动驾驶技术的相关避障策略进行分析,同时对自动驾驶新技术的融合现状进行总结,最后阐述了自动驾驶技术所面临的挑战及前景。
2 避障策略分析
2.1 多传感器的信息融合
多传感器信息融合是指通过优化处理来自各个传感器的数据信息,从而得到最佳数据参考结果的过程。由于一个传感器只能反映有关车辆某一方面的状态信息,所以只利用单个传感器所提供的数据信息是浅薄片面的,其准确性与可靠性都不高,而这也可能会极大地影响自动驾驶车辆的控制性能。所以说,多传感器的传导作用会使车辆获得更为周全可靠的控制信息,进而使得整车驾驶系统的控制性能得到强化、升级。
传感器包含有3 种层次的信息融合,分别是数据级融合、特征级融合以及决策级融合[4]。其中数据级融合旨在对所采集的原始信息进行直接的数据融合分析,其处理内容最为广泛具体,能获得最为详尽的路面信息,而特征级融合及决策级融合则主要基于各类信息的提取、分析操作来实现信息融合。
2.2 模糊控制系统理论
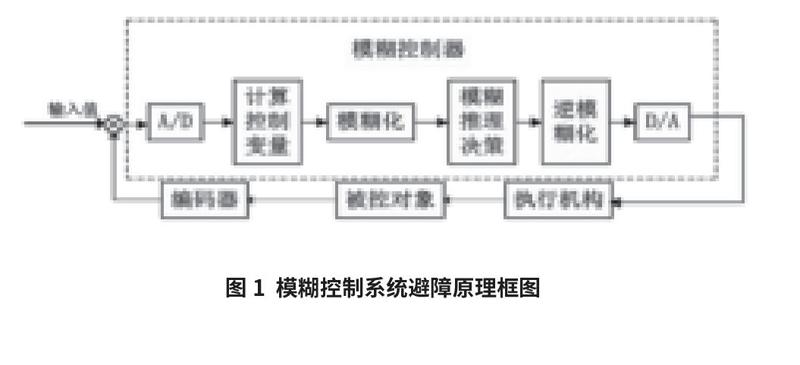
模糊控制系统主要是由输入接口、输出接口、模糊控制器、检测装置、执行机构及被控制对象等组成,其基本思路是利用模糊数学相关知识对系列传感器的综合反映进行判断和甄别,最后通过获得的参数实现控制并作用于被控制对象或道路环境。主要流程首先对于输入数据进行筛查与提取,以此获得符合要求的有效输入量;其次将符合相应标准的输入量进行尺度转换,利用完成尺度转换后的输入量确定其模糊量对应的模糊语言,并由此选出合适的隶属度函数;最后通过依据相应规则得到的输出变量模糊值实现对象控制[5]。其模糊控制系统避障原理如图1所示。
2.3 有关避障行为的分析
由于遭遇障碍物的类型存在差异,对应采取的避障行为也不尽相同,应当依据现实生活中车辆实际的避障行为进行优化设计,使其避障行为更具人性化、智能化。在现实生活中,车辆实现避障的主要形式有停车避障、跟车避障和超车避障3种[6]。
跟车避障即当智能驾驶车辆于道路上行驶时,如果受到前车阻碍且无法超越时,则只能跟随前车行进。此时如果车流量很大,车辆行驶间距较小,自动驾驶车辆的速度将受到前车车速的制约,且只能依据前车所反映的信息进行感应控制、调整车速,使自身行驶车速在前车车速附近摆动以避免碰撞事故。
此外,为了保证安全驾驶,在一定车速下应与前车之间保持相应的距离,以防出现突发事件。若前车突然减速制动或道路上突然出现其他障碍物时,车辆的检测控制系统则会及时做出制动停车避障反应。
无论是停车避障还是跟车避障,如果假设前车在t1时刻有减速行为,自动驾驶系统反应时间为t2,那么跟随车辆将在(t1+t2)的时间内做出相应的减速行为,因此两车之间的纵向距离成为驾驶行为是否安全的重要衡量指标的同时,也是避障设计不可或缺的重要参考。
研究表明,同向行驶车辆间的安全距离要求为:当车辆在一般公路上行驶时,车辆的纵向间距应当不小于30m;当车辆在市区道路上行驶时,车辆的纵向间距应当不小于20m;当车辆在繁华地带行驶时,车辆的纵向间距应当不小于5m,以此来保证行驶安全。而当车辆行驶中,如果前方车辆行驶状态良好且速度适宜时,主车辆可保持跟随状态行驶;如若遇到拥堵排队、前方发生事故或前车速度过小等情况时将产生超车需求,当邻近车道没有其他车辆干扰,便可以驶入邻近车道完成超车动作。
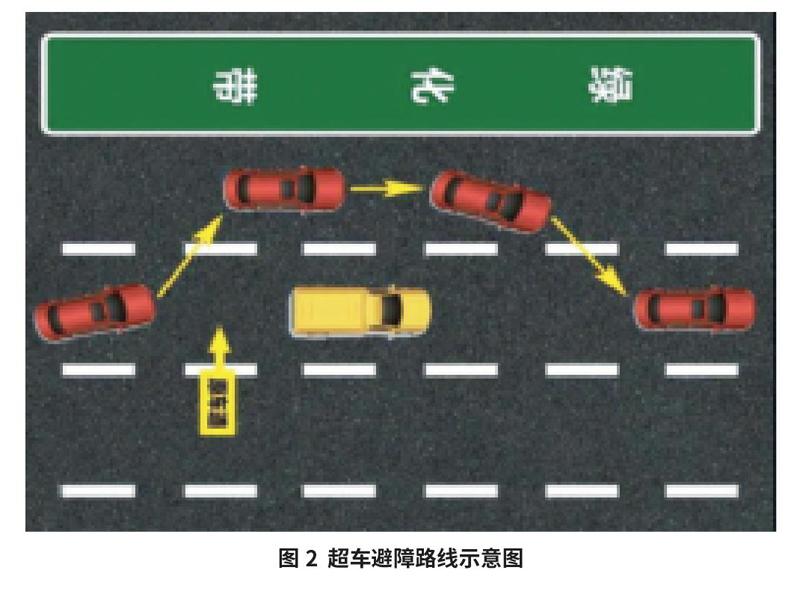
避障超车过程中,自动控制装置的反应时间、车辆速度、加速时间、两车之间的纵向间距(当车速大于或等于40km/h时,纵向车间距应大于或等于80m;当车速小于或等于30km/h时,纵向车间距应大于或等于35m)及横向安全距离等,都是影响安全性的重要因素。一般研究中,将车头时距作为分析跟随避障行为的重点,当车头时距大于4s/辆时,车辆的速度选择有很大的自主性;车头时距为3s/辆时,则跟随状态良好;若小于2s/辆时,后车速度将极大受到限制,开始提高车速,向前车的左侧靠近,进行超车以实现避障目的[7]。其超车避障路线如图2所示。
3 自动驾驶新技术的融合现状
3.1 自动驾驶技术与城市数据大脑融合
城市数据大脑被定义为一个服务于政府和大型企业之间、进行智慧城市治理的大型信息共享平台。就城市交通方面而言,城市数据大脑可以融合一个城市的数十万条交通信息,包括实时交通状态、行人出行信息以及公交车运营信息等。基于大數据和人工智能技术,城市数据大脑有能力预测未来1小时的交通情况变化,甚至有能力掌握城市交通运行规律[8]。
2016年城市数据大脑在萧山进行初步实验,道路车辆平均通行效率提升3%~5%,试点路段更是提高11%[9]。随着现代化信息技术的发展与应用,城市交通拥堵治理的策略将得到进一步优化升级。这对于自动驾驶技术而言,无疑是极其重要的协同助力。
3.2 自动驾驶技术与5G网络融合
通讯技术和智能车辆的融合随着国内5G网络的成熟而走上了快车道。通过在实验室的模拟数据实验得出的结论来看,5G相比于以前的DSRC其可靠性和稳定性进步是惊人的,对于汽车行业而言,5G将会使得联网车辆实现从0到1的质变。其在自动驾驶车辆的安全性能方面表现得尤为突出,此时车辆、行人和道路并不再是独立的个体,他们在各种传感器和交通基础设施的协助下收集信息,再利用高效的5G网络传输信息,这使得曾经的零散个体变成了城市运行的集聚细胞(图3)。
他们的互相作用、互相配合对于城市中行驶的自动驾驶车辆而言,综合反映信息能提前了解危险的存在,从根本上阻遏了相当一部分行车紧急情况。虽然车辆的使用环境将要面临更多的困难和风险,如互联网车辆需要更高标准的配套设施、合理设计的城市交通线路以及区域覆盖完备的5G基站等,但5G时代的到来使车辆持续稳定地连接网络成为可能,并获得逐步发展。
3.3 自动驾驶车辆的实体应用
目前车辆企业将自动驾驶发展思路定位在一个固定场景的问题解决之中。从最简单的单个动作,如高速下制动场景的控制、高速公路或地面标线清晰路面的车道控制,到拥堵路段自动驾驶,再到上海洋山港无人码头实现小区域内的全部自动驾驶,表明运用信息互联互通的自动驾驶技术已然初具雏形。
近些年来,我国汽车行业面向革新,智能化发展趋势明显,行业发展动态日新月异。如2018年7月,图森未来(TuSimple)无人集装卡车队经过超百天的试运营实验最终证明,其具备了在白天、夜晚以及雨天等特殊天气下的完全商用能力。
2020年4月,京东物流集团自动驾驶首席科学家孔旗在疫情防控新闻发布会上宣布,在当前疫情的影响下,京东物流将采用L4级别的自动驾驶快递车进行快递的配送工作。其基本流程是快递员将自动驾驶车辆进行清理消毒、放置快件、线路选取并点击出发后,车辆将按照预定路线行驶,在到达目标地点时会通过短信、电话的形式通知并等待客户取件。
随后如此往复可实现整条线路取件点的递送服务,在工作任务完成后快递车将自行返回始发配送站点(图4)。在此过程中,将大大减少人员接触情况,能更为便捷、安全地完成业务活动。值得注意的是,京东智能快递车是全球行业内首次L4级别自动驾驶技术的落地应用,这表明技术发展源于生活同样也服务于生活。
4 自动驾驶技术的挑战及前景
就目前而言,虽然自动驾驶技术在多个方向皆有探索发展,但是其普及应用仍然面临诸多挑战。
首先是法律责任的归属问题。如果自动驾驶车辆发生事故,驾驶员和乘客会认为,所有行驶的判断都是车辆做出的,那事故责任也应该由车辆厂商承担,而站在车辆厂商的角度则并非如此。虽然很多国家对于自动驾驶相关法律法规的制定有所准备与推进,但是时至今日都没有真正意义上的行业法规颁布实施。
其次是自动举措的伦理道德观问题。2018年,麻省理工学院媒体研究人员经过2年名为“道德机器”实验的研究,他们得出的结论是,自动驾驶车辆采取措施的选择判断标准是由使用地的政治、文化环境所共同决定的。在不同环境的影响下,其行为选择将大相径庭。对于车辆在遭遇紧急情况时,优先保护驾驶员侧或副驾驶侧、优先保护车内人员或道路行人等问题,自动驾驶相关技术发展仍有待商榷与探索。
第三是安全隐患问题。电子信息产品并非绝对的安全,随着自动驾驶车辆的普及使用,如若车辆控制系统被黑客入侵致使大范围自动驾驶车辆无法行驶或行为失控,在这种情况下所造成的后果无疑是十分严重的。本该服务于人类的智能助手成为了不法分子的犯罪新工具,由此衍生新的安全問题将在极大程度上不利于自动驾驶行业的持续健康发展。
即便自动驾驶车辆面临诸多瓶颈,但其发展与普及形势不可逆转。据美国电气和电子工程师协会(IEEE)预测,本世纪中叶前,自动无人驾驶车辆将占据全球车辆保有量的75%[10]。此直观数据的实质暗示着,车辆交通系统概念将迎来前所未有的新的变革,交通规则、基础设施建设甚至社会生产环境等,都将或多或少的随着无人驾驶车辆的不断进化而产生质变。高级别自动化驾驶是人类追求智能出行的技术基石,它将成为网络化、信息化和智能化时代发展成果的智慧结晶。
猜你喜欢
中国经贸(2016年21期)2017-01-10
合作经济与科技(2017年1期)2017-01-03
商情(2016年43期)2016-12-26
电子技术与软件工程(2016年20期)2016-12-21
中国市场(2016年23期)2016-07-05
商(2016年20期)2016-07-04
现代经济信息(2016年6期)2016-05-31