基于LoRa通信的空冷凝汽器监测系统设计
2020-10-19 10:00胡佳佳李志斌杜敏荣
仪表技术与传感器 2020年9期
胡佳佳,李志斌,韩 祥,杜敏荣
(上海电力大学自动化工程学院,上海 200090)
0 引言
直接空冷技术相比于湿冷技术,具有节约用水,经济效益高等优点,在富煤缺水地区的火力发电厂中得到广泛应用[1-2]。空冷凝汽器利用冷空气将热蒸汽冷凝成水,在冬季气温较低的北方,由于设备直接暴露在大气环境中,冷凝水冻结造成散热管束破裂的事件屡有发生,严重影响机组的运行,造成经济损失,并且维修成本高。
空冷凝汽器系统规模庞大,现场情况复杂,采用传统的热电偶、热电阻等有线测温方式,存在布线供电复杂,安装困难,测量精度不高,造价高、维护困难等问题,很难大规模灵活的监测空冷凝汽器的温度场。针对上述问题,为有效的预防冻结现象,设计了基于LoRa无线通信的空冷凝汽器监测系统。
1 系统整体方案设计
基于LoRa通信的空冷凝汽器监测系统主要有数据采集节点、数据汇聚节点、网关节点和监测界面等部分组成,其系统框图如图1所示,数据采集节点主要通过传感器采集空冷岛A型塔的温度、风速、风向等信息,数据经过处理后通过LoRa无线发送装置短距离发送到汇聚节点。数据汇聚节点与采集节点进行组网,接收所在区域内的节点数据,对数据进行整理后,透传到网关节点。网关节点接收LoRa汇聚节点发送的数据后,再通过TCP/IP协议上传到上位机。同时扩展RS485接口,可通过ModBus协议接入电厂的DCS系统。上位机实时显示空冷凝汽器A型塔的温度场信息,根据工作人员设定的温度阈值进行防冻预警,便于巡检。
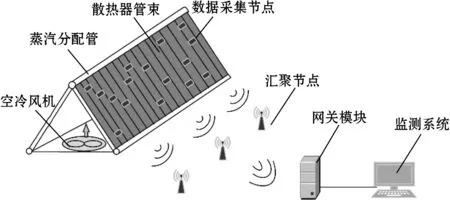
图1 系统总体设计框图
2 硬件设计
本系统的硬件分为3部分(数据采集节点、数据汇聚节点和网关节点),具体硬件框图如图2所示。
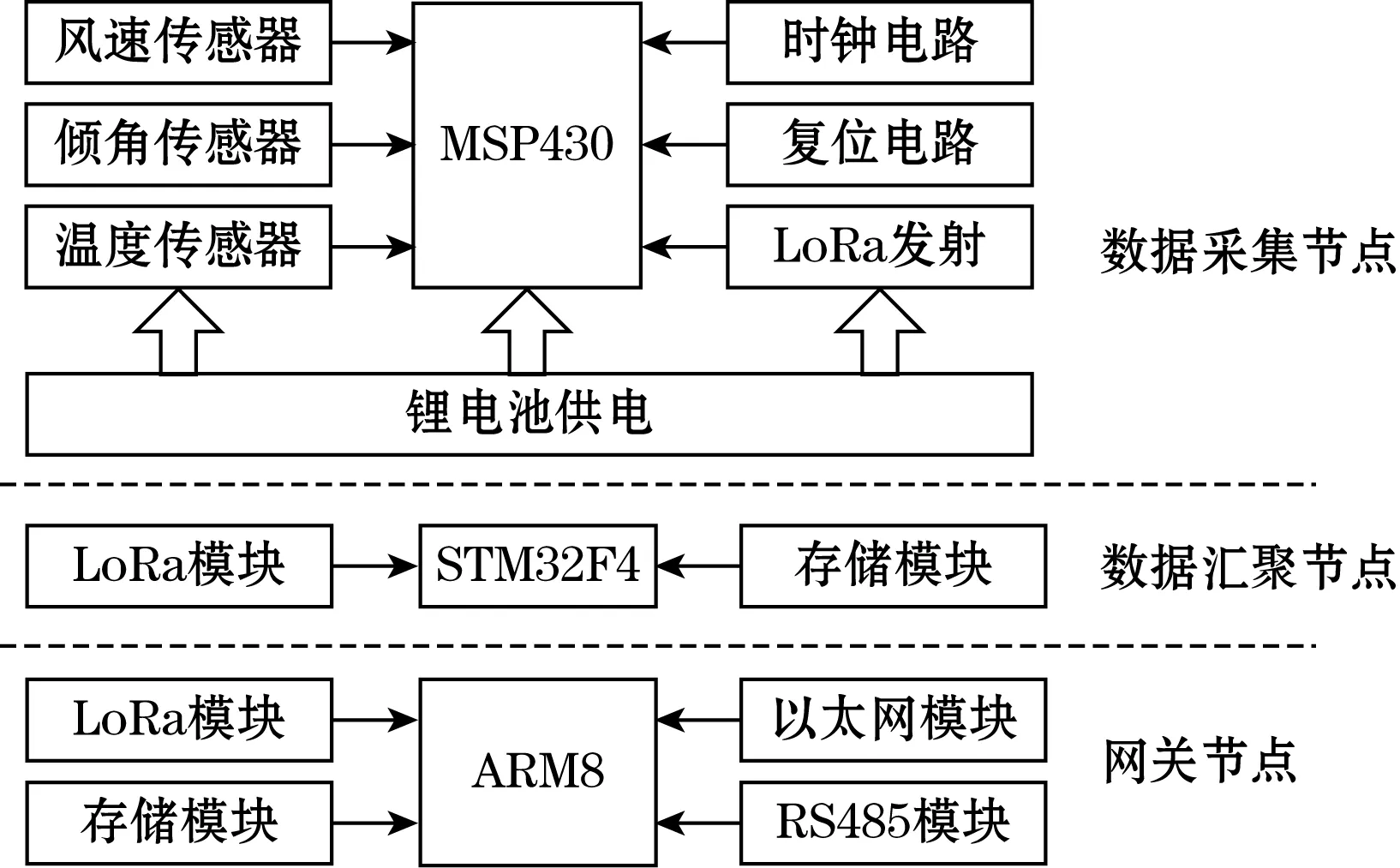
图2 系统硬件框图
数据采集节点主要包括控制器MSP430、SX1278LoRa模块、STS35-Dis温度传感器、MPU6050倾角传感器、HSTL-FSX03风速风向传感器、电源供电模块。数据采集节点最主要是温度节点,采集空冷凝汽器上温度信息、通过LoRa无线方式发送数据。考虑空冷凝汽器的空中运行安全问题,采用倾角传感器MPU6050监控它的摆动倾角。风速及风向是影响空冷机组的运行的重要因素,采用HSTL-FSX03风速风向传感器进行测量。系统采用5 V锂电池供电,设计时充分考虑的控制器、传感器以及电路设计的低功耗。
数据汇聚节点采用STM32F4为主控芯片,通过LoRa接收和发射模块接收数据采集节点的数据信息,对数据进行处理,发送给网关节点。此节点带有数据存储功能,若遇到LoRa远距离无法上传数据问题时,可缓存数据,等待再次上传。
网关节点采用ARM8芯片,通过LoRa接收汇聚节点数据,并通过以太网发送至上位机。预留485模块,便于接入电厂DCS系统。
2.1 温度测量
空冷凝汽器监测系统主要考虑迎风面低温回流管束的情况,将在A型塔的冷却管束迎风面布置温度测点,测点要求有一定密度,但是体积不能太大,太大会影响散热管束的散热效果。在温度测量中,测量值要保证能最大限度的接近管束内流体温度,并安装在最容易结冰的区域,从而预防冻结事件发生。本系统选用的STS35-Dis温度传感器是一种高精度的数字传感器,体积小、功耗低,量程在-55~125 ℃,精度达到±0.1 ℃,满足系统需求,采用I2C接口,转换速度快,分辨率高。电路设计简单,与MSP430相连只需要2个管脚,节约IO资源。具体电路图如图3所示。
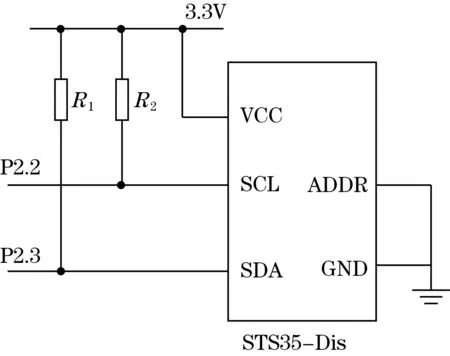
图3 温度测量电路
2.2 温度布点选择
空冷机组正常运行时,在汽轮机做功后,会将蒸汽送入空冷凝汽器的蒸汽分配管道,并由蒸汽分配管道向各冷却单元进行配汽。散热管束可分为顺流区和逆流区,管束内蒸汽流动过程如图4所示。空冷风机将冷空气自下往上吹,顺流区管束内蒸汽自上往下流动,与冷空气充分换热凝结成水,凝结水量在管束下方逐渐增多,在冬季环境温度较低的情况下,顺流区的蒸汽在管束下方完全凝结为水,极有可能发生冻结现象。逆流区管束内蒸汽从凝结水联箱自下而上进入,与冷空气继续换热,管束上方蒸汽量逐渐减少,由于管束上方存在夹带蒸汽不凝气体,在空气冷却能力较强时,会出现絮状结冰现象,严重时造成管束堵塞。
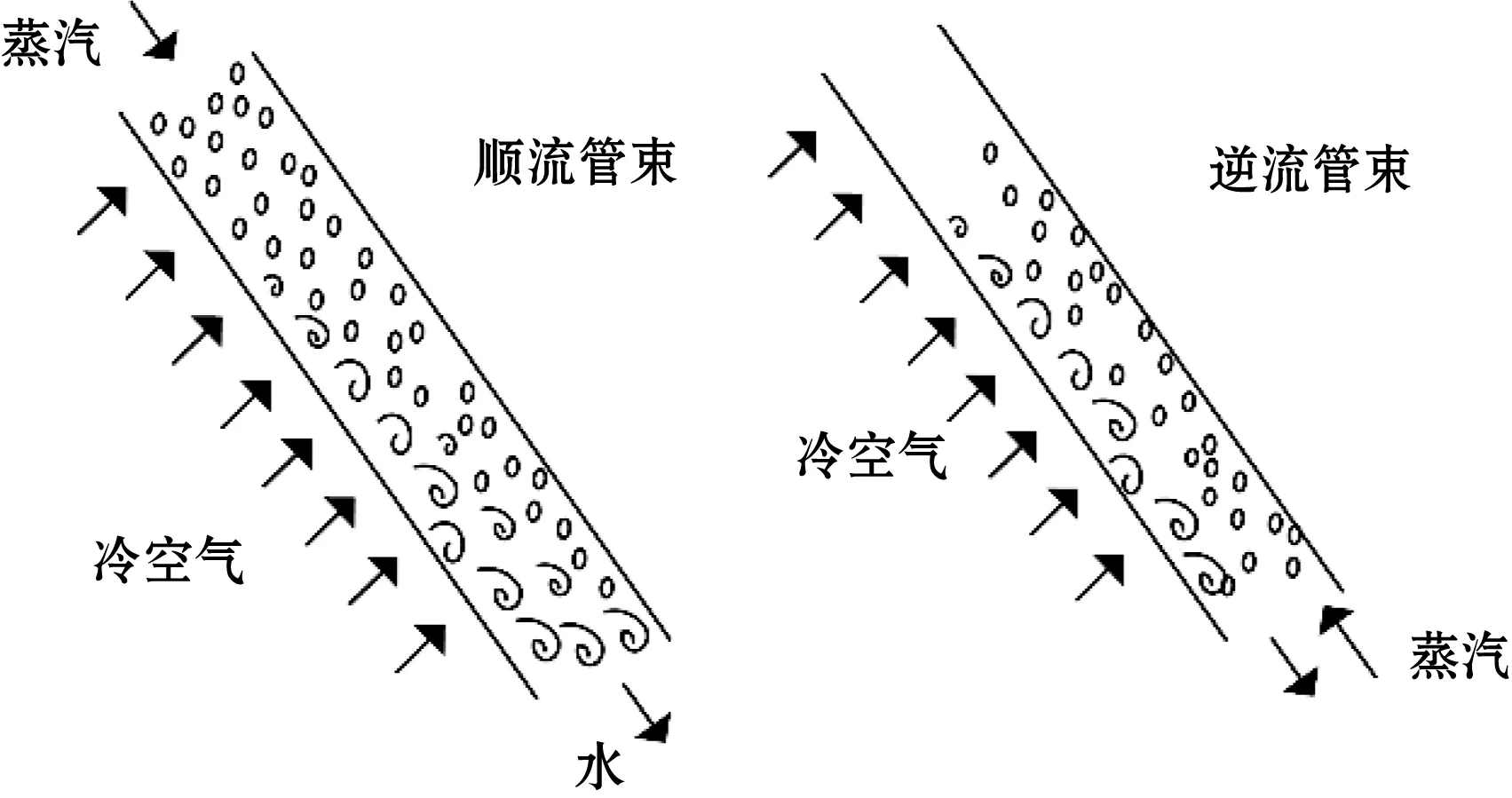
图4 管束蒸汽流动示意图
空冷凝汽器散热管束的表面温度客观反映了蒸汽分配不合理以及管束冻结等情况,所以在对其进行温度监测时,采用均匀布点和集中布点相结合的方法,对顺流区的下部以及逆流区的上部区域进行重点监测,具体布点图如图5所示。

图5 顺逆流区布点示意图
为准确采集散热管束内部温度,必须保证传感器与管束翅根接触面积尽可能大,STS35-Dis温度传感器体积为2.6 mm×2.6 mm×1 mm,可以直接伸入翅片内部与管壁贴合,从而实现准确测温。
2.3 LoRa无线传输
相对于WiFi和ZigBee等无线通信方式,系统数据的传输采用LoRa无线技术,传输距离更远,功耗更低。本系统选择高性能的SX1278系列射频芯片,多通道传输,接收电流为9.9 mA,可以达到-148 dBm的高灵敏度,抗干扰性强,最远通信距离长达15 km。系统采用星型网络拓扑结构,结构简单,组网快捷。考虑到距离过远的丢包问题,系统会在合适的距离增加LoRa汇聚节点,实现数据的透传。SX1278芯片具有256字节的FIFO,单片机MSP430可通过SPI总线控制SX1278的信道和使用频段,频段为433 MHz,当MSP430采集完传感器数据送入SX1278,由SX1278将数据上传到汇聚节点,具体电路如图6所示。
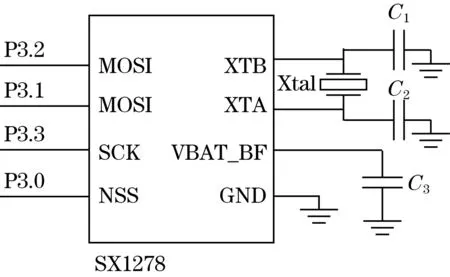
图6 LoRa无线传输电路
3 软件设计
空冷散热器的监测系统的软件系统主要由传感器数据采集节点软件、网关节点软件和上位机显示界面组成。
3.1 数据采集节点
数据采集节点通电后,对系统进行初始化,检查传感器和LoRa无线模块能否正常工作,每隔1 s采集传感器信息,对数据进行平滑处理,将数据通过LoRa无线模块发送定时到汇聚节点,具体流程图如图7所示。
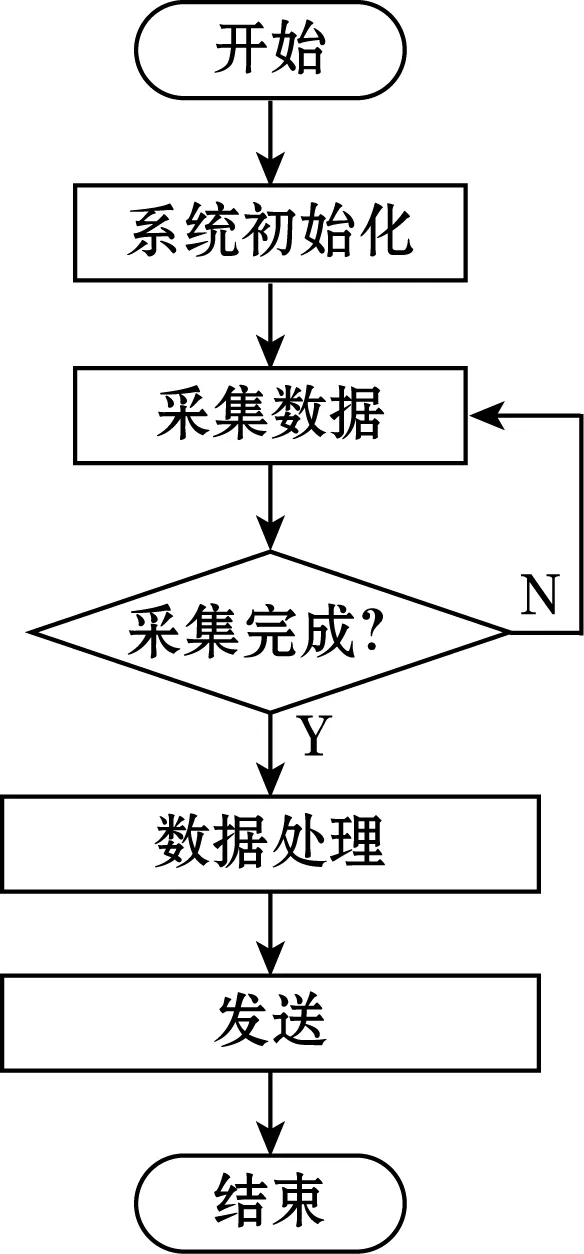
图7 数据采集节点软件流程图
3.2 网关节点设计
网关节点软件采用μC/OS-II小型操作系统实现任务调度,移植LWIP协议栈实现TCP/IP以太网传输协议。网关节点上电后,对系统进行初始化,检查LoRa模块并进行组网,组网完成后,实时接收汇聚节点的数据,将数据按照一定格式通过以太网转发给上位机。若要接入DCS系统时,则打开RS485通信模块,以MODBUS协议格式向DCS系统发送数据。具体软件流程如图8所示。

图8 网关节点软件流程
3.3 上位机设计
上位机采用C#语言编写,包括系统管理、监测界面、数据通信、记录查询等模块。系统结构图如图9所示。

图9 上位机系统框图
温度场显示模块采用不同颜色显示负温度、低温和正常温度,工作人员可以非常直观地判断疑似故障点,再进行现场的排查。在防冻预警模块中,每个区域可以人为设置温度阈值,当温度超出阈值范围时,会触发报警,警示工作人员进行相应的处理。数据管理采用MySQL数据库进行数据存储,将每个观测点的数据保存下来,为记录查询提供数据支持。
4 测试与实验
4.1 测温误差分析
温度采集节点在实际应用中必须防水防风,所以对STS35-Dis温度传感器进行了封装,为降低封装对传感器测温的误差,进行恒温测试,实验数据如表1所示。
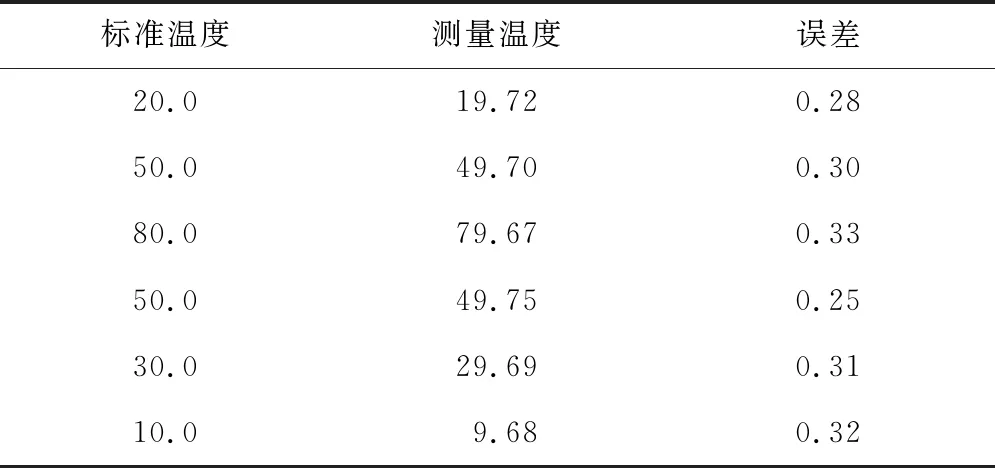
表1 测温数据表 ℃
将传感器节点放在恒温槽中,先进行升温测试,再进行降温测试。实验数据表明,误差稳定在0.3 ℃,对传感器进行误差补偿,测温精度得到提高。
4.2 LoRa通信测试分析
本文设计的基于LoRa通信的空冷散热器监测系统采用无线通信方式,保证系统传输信息的可靠性,稳定性尤为重要。温度采集节点每10 s向汇聚节点发送一次数据,通过改变采集节点与汇聚节点的安放距离,研究接收数据的丢包率和错误率,具体实验数据如表2所示。
由表2可知,LoRa无线传输数据过程中随距离的增大而不稳定,当距离超过2 000 m时,发生数据错误和丢包的现象。为保证其可靠性和稳定性,系统应在1 500 m以内的范围内进行数据传输。
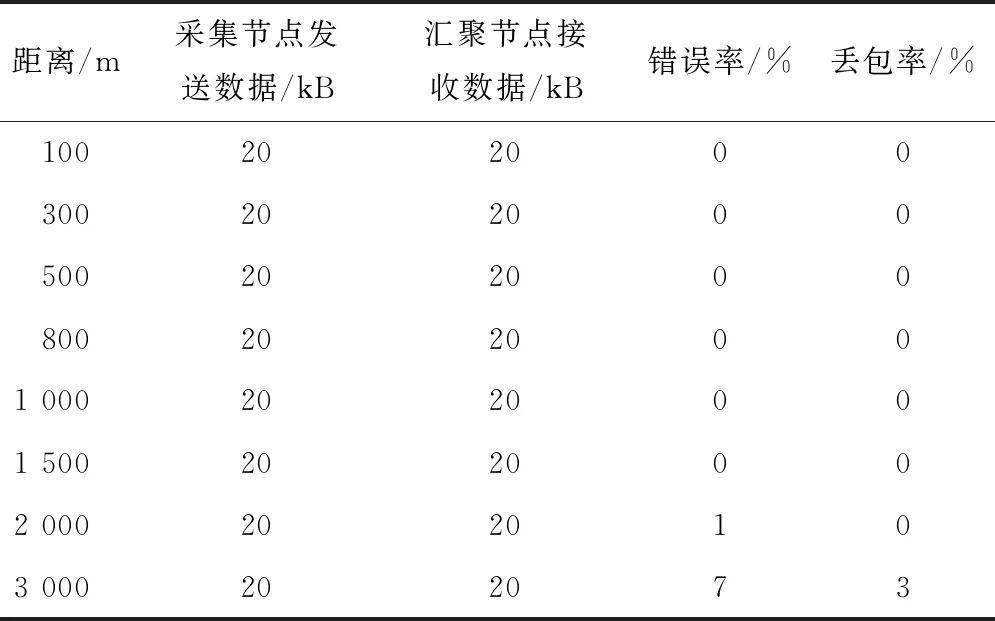
表2 LoRa传输数据统计表
5 结束语
本文所设计的基于LoRa通信的空冷凝汽器监测系统,摆脱了传统的有线测点,引入物联网无线技术,实现凝汽器温度场的信息交互,提高了系统的灵活性。利用高精度的传感器,准确采集温度信息,并形象
的描绘出空冷散热器的温度场,有利于工作人员了解空冷凝汽器的运行情况,预防冻结问题。实际实验表明,该系统采集精度高,实时性好,可靠性高,布点方便,维护高效简单。
猜你喜欢
水泵技术(2022年2期)2022-06-16
科学技术创新(2021年19期)2021-07-16
沈阳航空航天大学学报(2020年6期)2021-01-27
装备制造技术(2020年2期)2020-12-14
海峡姐妹(2019年6期)2019-06-26
中国特种设备安全(2018年11期)2019-01-08
中国特种设备安全(2018年10期)2018-12-18
军营文化天地(2017年6期)2017-06-28
智能系统学报(2017年1期)2017-06-01
中国工程咨询(2011年9期)2011-02-16