一种农田灌溉系统的智能发电系统设计与分析
2020-10-17 03:10:44杨媛媛
农机化研究 2020年1期
杨媛媛
(贵州电子信息职业技术学院,贵州 凯里 556000)
0 引言
随着农田灌溉技术的不断进步,新型化、智能化的机械设备相应投入其中,不间断地持续电源供应可保证智能灌溉设备的平稳高效进行。图1为某农田灌溉系统现场作业场景图。由图1可知:大型的灌溉组件在智能发电系统的支持下进行连续均匀灌溉,整体的农田灌溉系统通过供水系统的配合,加之土壤变送器等设施的实施监测,控制各灌溉回路的出水量,最终达到预先设定的土壤湿度目标值,实现自动灌溉。依据当前智能发电的技术原理,对应用于灌溉系统的发电装置进行了分析。
1 智能发电原理及组成
农田灌溉系统的智能发电系统原理:整体运行机构由机组控制系统向变流器的控制单元、执行动作单元及并网控制单元发出控制信号,经电子回路到达各变压组件及PMSG组件,进行电力电子变流和变压,当条件超过阈值范围,会从PMSG组件反馈至机组控制系统,进行调节发电。
农田灌溉系统的智能发电系统核心组件主要包含PMSG、电机侧转换器、电网侧转换器,以及信息采集与隔离电路等,在各组件的合理连接与布置下构成具有高效输送功能的智能发电装置,如表1所示。其中,电网侧转换器主要实现输出各功率的耦合控制,电机侧转换器主要实现减小发电系统原动机的转矩消耗,使得智能发电系统在最佳的效率下运作。
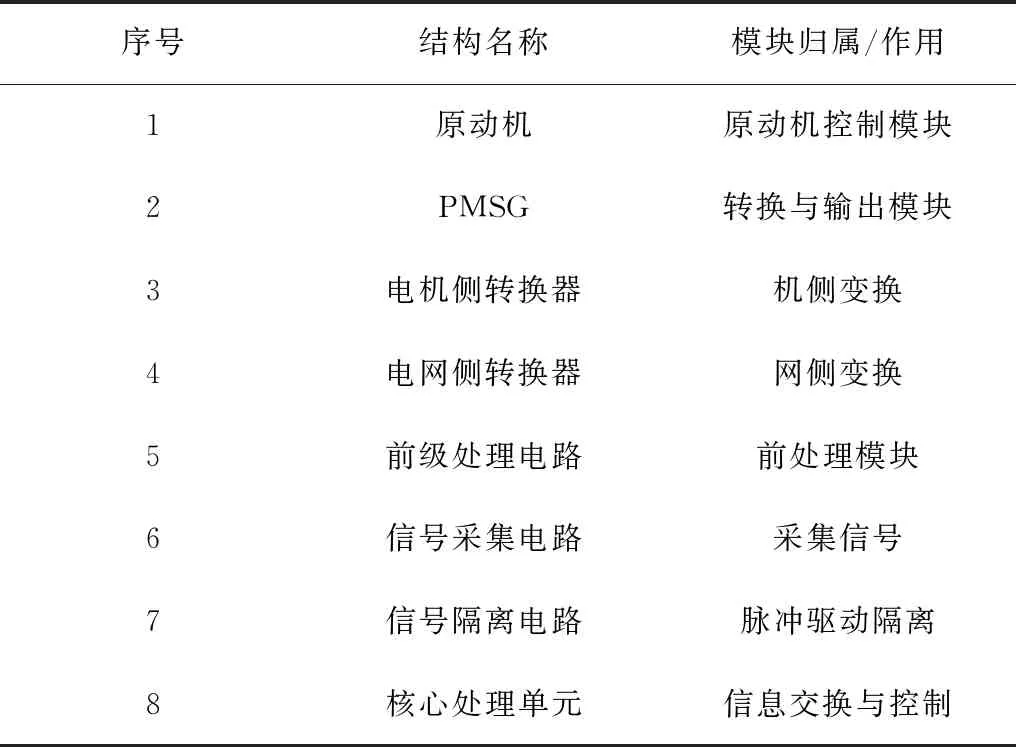
表1 农田灌溉系统的智能发电系统核心组件Table 1 Core components of intelligent power generation systems for farmland irrigation systems
2 智能发电系统设计
2.1 数学模型建立
以农田灌溉系统的智能发电结构及原理为基础,根据图2所示的发电系统绕组坐标系示意图,设q与d、α与β坐标下的绕组匝数相同,经数据处理,得出定子电压方程为
(1)
式中usd—d轴电压分量;
usq—q轴电压分量;
isd—d轴电流分量;
isq—q轴电流分量;
Rs—定子电阻;
Ld—定子d轴自感;
Lq—定子q轴自感;
ω—转子角速度;
ψ—转子永磁体磁链值。
推导出智能发电系统的转矩与功率关系,即
Te=p[ψisq+(Ld-Lq)isdisq]
(2)
(3)
Pe=Teω
(4)
式中p—发电系统电机的极对数;
Pe—发电系统电机的电磁功率;
PI—发电系统电机的输入功率;
PO—发电系统电机的输出功率;
pFe—发电系统电机的铁损耗;
pm—发电系统电机的机械损耗;
pcus—发电系统电机的铜损耗;
Te—发电系统的电磁转矩。
同时,该农田灌溉的智能发电系统参数平衡方程为
(5)
式中x′—执行部件位移;
fe′—发电系统电磁力;
p′—声波压力;
M—次级质量;
γ—机械阻尼;
k—弹簧劲度系数;
r—发电系统内阻;
R—负载电阻;
X—初级线圈绕组电抗。

图2 农田灌溉发电系统绕组坐标系Fig.2 Winding coordinate system with the irrigation power generation system
2.2 系统硬件优化
进行农田灌溉系统的智能发电装置硬件设计,如图3所示。将土壤湿度传感器、pH传感器及EC湿度传感器等多种传感装置安装在智能发电系统合理的位置,经多路信号识别处理后到达发电系统的转换电路,最终输送到核心处理控制单元;控制中心与计算机控制接口进行高度衔接,完成数据共享。另一方面,核心处理单元融合灌溉发电系统和转换电路的内容,经处理后分别传递给显示监控单元和关键管路的电磁阀控制装置,各类硬件设置形成良好的通信回路和体系。
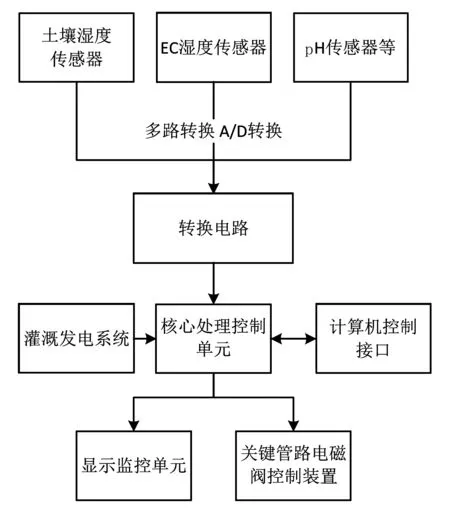
图3 农田灌溉智能发电系统硬件设计图Fig.3 Schematic diagram of hardware design of intelligent power generation system for the farmland irrigation
针对智能发电系统的核心装置进行结构分析,其主要结构形式如图4所示。设计性能良好的农田灌溉智能发电系统,发电装置的结构构成尤为重要。当直线发电机工作,推动活塞进行往复运动,此时谐振管、惯性管的内部体积发生变化,从而影响反馈管进行反馈,缓冲罐亦做出相应的动作反应。

1.反馈管 2.缓冲管 3.惯性管 4.谐振管 5.直线发电机 6.谐振弹簧 7.活塞 8.负载阻抗图4 农田灌溉系统的发电核心装置结构简图Fig.4 Schematic diagram of the power generation core device of the farmland irrigation system
2.3 系统软件控制
针对该智能发电系统进行软件程序设计,采用模块化控制,根据功能需求的不同,划分为主程序、中断服务、子模块控制及通信程序等。主程序主要负责实现变量和系统初始化的设置、储存变量,以及针对通用的等待与中断进行服务等;子模块控制是实质作业的装置,将电网侧的变换器控制与电机侧的变换器控制实现有序配合。当农田给出土壤湿度及pH等测量指标符合要求时,该智能发电系统进行定时自主中断,实现无人智能化灌溉。此处给出控制程序片段:
#define ADDRESS 0×01
…
sbit tr=P1.6;
void sevice-scrial(void) interrupt 6 using 1
{
uchar rs;
RI=0;
ES=0;
tr=0;
rs=SBUF;
if(rs=0×ff)
{
SM2=1;
ES=1;
return;
}
…
tr=1;
SBUF=ADDRESS;
while(TI=0);
TI=0;
tr=0;
…
}
针对灌溉发电系统的核心程序算法的变量进行规则设置(见表2),依据控制算法分割规则及隶属函数的要求,选取0.5为算法语言变量E的划分单元,定义出对应的语音值,分别为正大PL、正小PS、零值ZE、负小NS和负大NL,从而在语言程序的控制下,进行智能发电灌溉动作。

表2 灌溉发电系统核心程序算法变量设置规则表Table 2 Algorithm variable setting rule table of the core procedures for the irrigation power generation system
3 灌溉智能发电试验
3.1 系统配置
进行农田灌溉系统智能发电设计试验,首先进行智能发电系统的关键参数配置,具体参数值如表3所示。发电装置本体的参数符合相关要求后,为实现通信的准确迅速,选定物理层通信协议属性,设置如图5所示的智能发电系统通信协议执行流程图,主要针对接收数据的判定、发送及延时等相关动作进行控制。
图6为此次智能发电试验的装置布置示意图。土壤湿度是进行农田智能灌溉的指示性标志,选取1#、2#两个地块,首先通过土壤墒情的实时信息采集,经过网络控制及GPRS处理控制器进行装置运行情况的准确把控,智能发电系统的电路畅通与通讯环节保证实现智能发电灌溉的中心控制。

表3 农田灌溉系统的智能发电系统参数配置Table 3 Parameters configuration of intelligent power generation systems for farmland irrigation systems
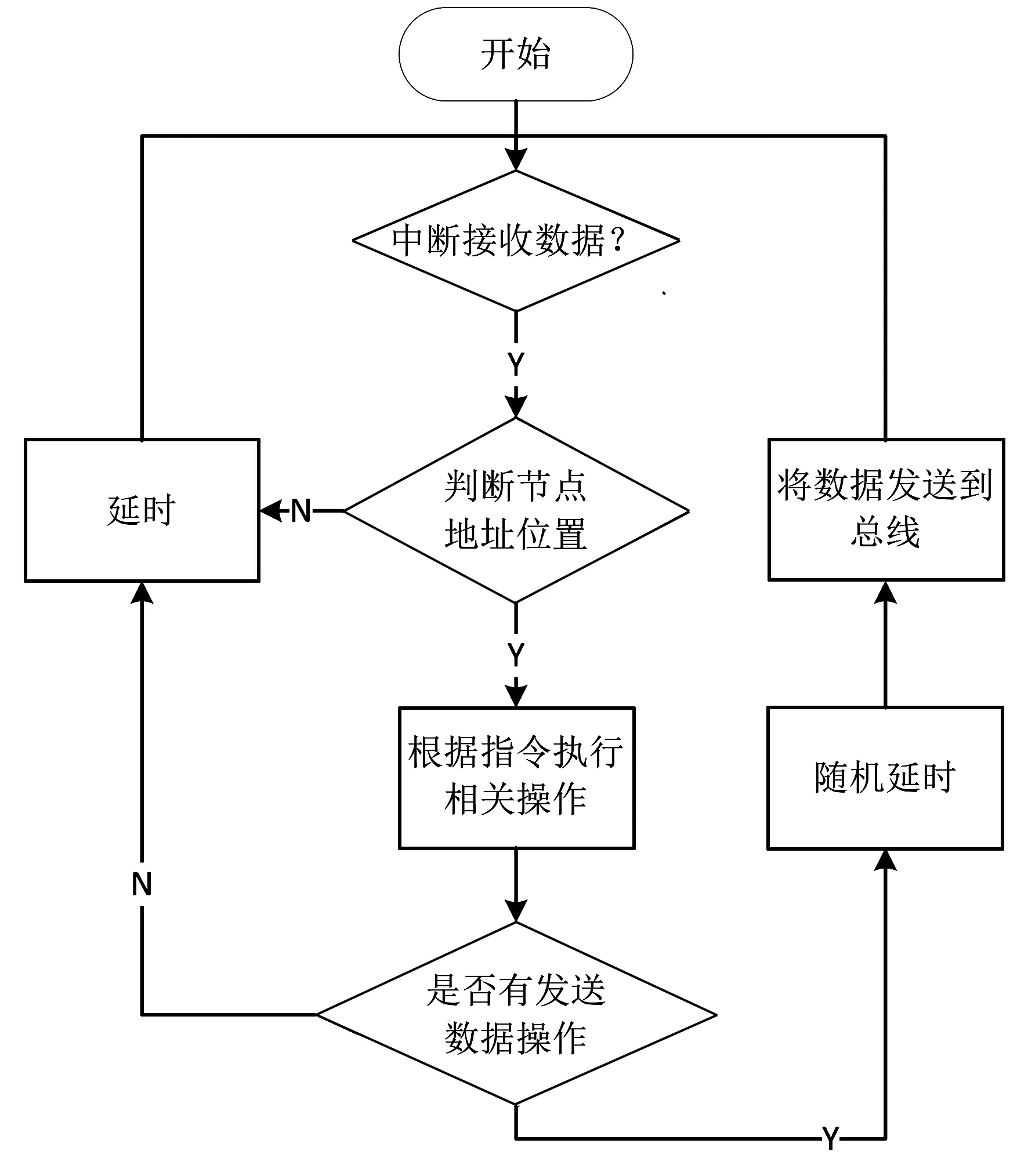
图5 智能发电系统设计通讯协议执行图Fig.5 Designed communication protocol execution diagram of the intelligent power generation system
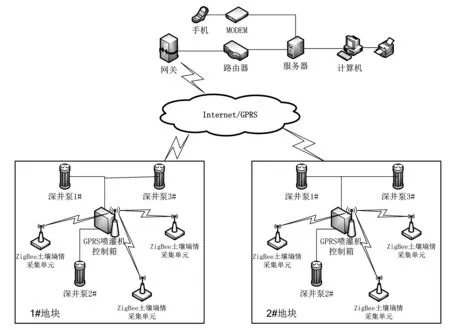
图6 农田灌溉系统设计试验装置布置Fig.6 Experimental device layout for the design on the farmland irrigation system
3.2 过程分析
通过数据处理后,给出图7 所示的发电装置关键部件处的影响表征对比图。选取工作部件(水轮机)的动力响应来反馈发电系统的设计效果,对下导轴承和转轮部位进行参数对比,以位移、频率f、旋转角速度Ω及横振速度(dX3/ dT、dX5/ dT)之间的关系为出发点,得到轴心轨迹、频谱及庞加莱分布状态。其中,X3、X5、Y3、Y5分别表示下导轴承和转轮在X、Y方向上的位移。轴心轨迹图表明,转轮处呈现出不规则的状态,且横振速度与位移的关系图呈现出多点,分叉现象明显。

(a) 轴心轨迹图 (b) 频谱图 (c) 庞加莱图图7 发电系统中发电装置关键部件处的影响表征对比图Fig.7 Influence characterization comparison diagram of the key components of power generation device in power generation system
4 结论
1) 通过对农田灌溉技术的研究,在了解农田灌溉智能发电机理的基础上,建立了智能发电装置数学模型,对智能发电系统进行硬件装置设计和软件控制系统设计,形成较为完善的农田灌溉智能发电系统。
2) 合理布置智能发电装置各组件,进行农田灌溉智能发电系统的模拟试验,通过发电装置关键部件处影响特征对比,得到运行中灌溉系统可能会受到冲击的部位,有利于智能灌溉发电系统的元件选取及搭配。
3) 此灌溉系统智能发电系统的设计可有效促进农田灌溉系统智能改进与开发,对类似发电装置有一定的参考价值。
猜你喜欢
环球时报(2022-06-15)2022-06-15 15:21:32
能源工程(2022年2期)2022-05-23 13:51:50
云南农业(2021年10期)2021-10-22 01:13:10
云南农业(2021年9期)2021-09-24 11:57:06
云南农业(2021年8期)2021-09-06 11:36:44
科学大众(2021年9期)2021-07-16 07:02:50
云南农业(2021年3期)2021-04-24 02:30:54
重型机械(2020年2期)2020-07-24 08:16:16
装备制造技术(2019年12期)2019-12-25 03:07:36
下一代英才(酷炫少年)(2017年3期)2017-06-15 13:00:06