
小型智能移栽机的设计与实现
2020-10-17 01:00张明容叶佐镇程清伟
农机化研究 2020年3期
张明容,叶佐镇,程清伟
(华南理工大学广州学院 汽车与交通工程学院,广州 510800)
0 引言
随着城镇化的高速进展,越来越多的农村人口涌向城市,农村的劳动人口越来越少。而我国在蔬菜、玉米、花卉等移栽方面,主要以人工为主,机械为辅,劳动强度大,效率低[1-3]。
国家“十三五”规划已把“智能农机装备”纳入了国家重点研发计划。在自动移栽技术方面,欧、美、日等国家的移栽机械虽然较成熟,但存在价格较贵、设计产品与国内农艺有脱节等特点[4-6],在国内很难推广。国内移栽机械研究较晚,但一些大学、科研单位和农机企业进行了研究,并取得了一定成果:山东农业大学的崔嵬等研制了2ZFS-1A型多功能烟草移栽机的研制[7];黑龙江省农机研究院的石铁研制了全自动玉米秧苗移栽机[8];中国农科院与现代农装科技股份公司共同研制出了旱地钵苗自动移栽机[9]。目前,国内外移栽机大部分与大型拖拉机配套使用[10-12],存在体积大、通用性差、成本高及无法大规模使用的问题。因此,本文设计了一小型智能移栽机,集运输、投苗、种植、压实及浇水等功能于一体,并能实现坑深、株距等的调整。
1 移栽机的整体结构及工作原理
小型智能移栽机由小车、移栽装置和控制系统3大部分组成,如图1所示。

1.移栽装置 2.智能车 3.控制系统
工作时,种植人员首先将需移栽的植物苗装在储苗器内,利用手持遥控器,通过WiFi模块发送指令将移栽机开至种植地;然后,根据移栽作物的情况通过人机交互界面设定合适的行间距、株间距及种植的深度;通过车载传感器检测土壤的温度、湿度,判断是否对环境给予改造,并控制机器浇水的量以保证作物的成活率;最后,启动移栽机工作,通过移栽装置实现自动挖坑、投苗、覆土、镇压及浇水等种植流程。
该机器适用于土地的大、小面积移栽作业,解决了人工移栽存在劳动强度大、智能化低的问题,可大大降低种植过程的劳动强度,提高工作效率。
2 移栽机主要装置设计
2.1 小车的设计
由于移栽机工作在野外,地面起伏不平,速度较低,工作时振动较大,发动机在这些工况燃烧较差、耗油多,而电驱动车刚好弥补了燃油车的缺点。因此,小车选用电机作为动力,四轮驱动,轮式行驶系[13],搭配空气避震器,具有环境适应能力强、灵活性高及所需动力相对于拖拉机少等特点,其结构如图2所示。
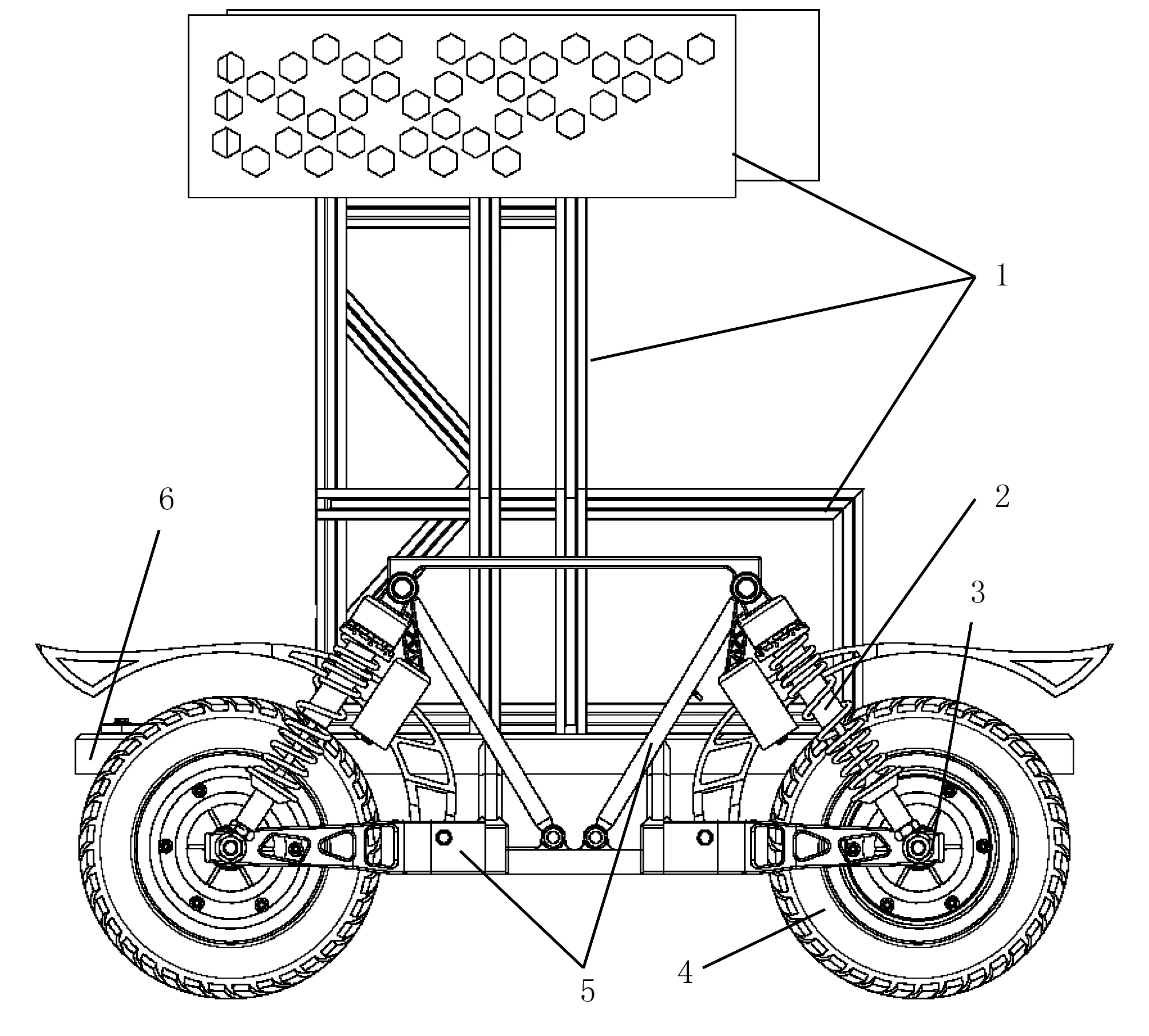
1.支架 2.空气减震器 3.轮边电机 4. 车轮 5.拉杆 6.底架
根据车子的使用要求:最高车速35km/h,最大爬坡度20°,20km/h匀速行驶的续航里程最大为120km,四轮驱动。因此,选用了无刷永磁直流电机,电机安装在车轮边直接驱动车轮,本小车选了4个电机;电池选用4个铅酸电池。表1和表2分别展示了电机与电池的参数。

表1 电机参数

表2 电池参数
2.2 移栽装置的设计
为了提高成活率,保证移栽的顺利完成,对移栽过程有以下要求:①有足够深和大的坑,且土壤回流少,利于植物苗入坑;②保证植物苗竖直向上,便于生长;③保证植物苗间一定的株距。
移栽装置是移栽机最重要的部分,用于实现挖坑、扩坑、投苗、压实和浇水过程,主要由种植机构、自动投苗装置和浇水装置组成。
2.2.1 种植和压实机构
本文选用导苗管式种植形式[14-15],保证苗在坑里垂直。为了减小结构尺寸,把导苗管和挖土枪设计为一体,导苗管出口为鹤嘴型,可以起到挖坑和扩坑双重作用。种植机构由鹤嘴式种植枪、鹤嘴盖板、压土板、滑轨、种植气缸、鹤嘴开合控制气缸和压土气缸组成,如图3所示。该机构布置在设备的中部核心位置实现苗圃的种植、覆土和压实工作。为了增加车子的续航,种植和压实机构的动力采用气动形式。

1.种植气缸 2.滑轨 3.种植枪 4.鹤嘴盖板 5.压土板
移栽时,首先控制继电器导通,种植气缸带动鹤嘴式种植枪沿着滑轨向下移动,使种植枪插入已松的土壤中,完成挖种植坑的流程;然后,鹤嘴开合气缸带动鹤嘴打开,同时对种植坑进行扩大,挡住土壤回流,植物苗从鹤嘴式种植枪管里滑落到种植坑中;种植气压缸带动种植枪上升,鹤嘴慢慢覆土;最后,由压实气压缸带动压土板进行覆土压实,同时鹤嘴式开合气压缸将种植枪口关闭。
移栽菜苗、玉米苗、烟草苗、小树苗等所要求的坑的深度一般在100mm以内,因此设定种植枪的最大插入深度为100mm,疏松土的单位压实力为0.5~1.5kg/cm3,通过压力p与下陷深度的关系[16]式(1),可以求出种植枪的压力,即
q=q0·h
(1)
其中,q为单位面积的压力,q0为单位面积压实力,h为压入深度。可以计算出单位面积的压力为5~15kg/cm2。
本设计采用最大的压力p为15kg/cm2或150N/cm2,进行气缸的选型。种植枪就是导苗管,一般移栽钵苗的形状为圆锥形,尺寸为φ40mm×60mm(底部直径×高度)[15]。为了方便挖坑,种植枪设计为方形(45mm×45mm),底部设计为楔形的鹤嘴形,楔角为35°。
因气缸的推力与挖坑力相等,由力平衡方程可得
pA=ηp1A1
(2)
其中,p为挖坑100mm需要的压力(150N/cm2);A为种植枪与土壤的接触面积,由于种植枪下端是楔形的,这里采用中间值30mm×30mm进行计算;η为气缸的效率85%,气杆作用力传递到种植枪滑动距离短,散热少,可以忽略;p1、A1分别为气缸的压力和气缸内径减去推杆直径的面积。
气缸的压力由供气设备提供,为了减轻质量,供气机采用便携式充气泵和气瓶相结合进行供气。由于充入气瓶的气体与充气结束后气瓶里气体的质量相等,由质量守恒方程可得
p0V=p2V2
(3)
其中,p0、V为充入气体的压力(大气压)和体积,p2、V2为充气结束后气瓶里的压力和气瓶体积。
气瓶用于向3个气缸充气,为了不让气缸的直径和气瓶的体积太大,气缸气体的压力设为0.3MPa,气瓶的体积V2设计为4L,联立式(2)和式(3),可以计算出种植气缸的内径D。由于挖坑深度是变化的,所以种植气缸选用可调双向作用气缸,尺寸为φ80mm×125mm(内径×行程),充入气体的体积为12L。
充气泵的选用优利特YD-S007,气压流量为50L/min。
同理,鹤嘴开合气缸和压实气缸的均为双向作用气缸,尺寸分别为φ25mm×100mm和φ25mm×100mm。
2.2.2 供苗机构
供苗机构的主要作用是向种植机构的投苗口自动投苗,主要由齿轮、齿条、步进电机、滑轨和放置苗圃的架子组成,如图4所示。工作时,控制系统控制步进电机运转,当步进电机正向转动时,与转子衔接的齿轮啮合齿条携带放置苗圃的架子前进,在滑轨的约束下,往前移动;当苗圃到达投苗口时,投下苗圃至种植枪,与此同时,步进电机停止转动,完成投苗的流程,等待下一投苗工作流程。
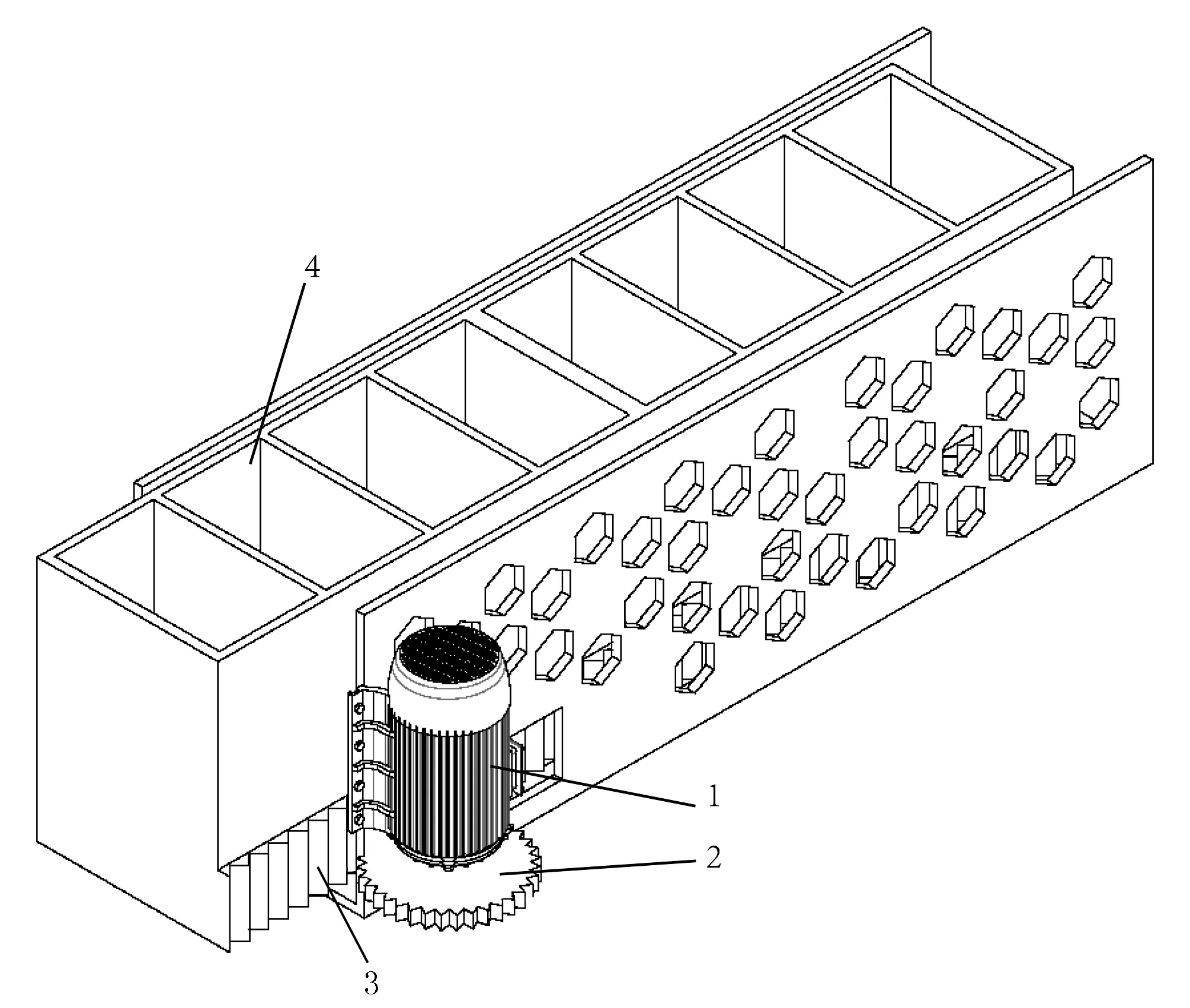
1.步进电机 2.齿轮 3.齿条 4.储苗容器
2.2.3 浇水装置
浇水装置主要是实现种植完成以后的浇水和对较干土壤的改善,主要由水箱、水管、喷头、水泵和继电器组成,如图5所示。

1.可调节喷头 2.水泵出水管 3.水泵吸水管 4.水泵
在压实机构工作完成后,控制系统控制继电器通断电来控制水泵的工作状态。通过继电器来控制浇水,可以通过设置参数调节水的流量,满足不同苗圃对水分的要求,提高了苗圃的存活率。
3 控制系统设计
目前,自动移栽机的控制方式主要有PLC、Fuzzy-PID和单片机控制[6,17-19]。根据移栽机的功能要求,采用STM32单片机进行控制,控制系统框架如图6所示。对于小车,采用BLD-300B驱动器对轮边电机的转速进行控制,从而实现启停、前进、倒退、转弯和刹车。种植装置主要通过控制继电器来实现移栽的动作,通过压力传感器检测充气瓶的压力,采用继电器控制充气泵的充气。远程控制系统是通过WIFI实现的,主要为人机交互平台,操作人员可以设置种植行距、深度、浇水量,观察移栽机的工资情况,还可以采用温度传感器和湿度传感器感知土壤的情况,进行土壤改善的控制。
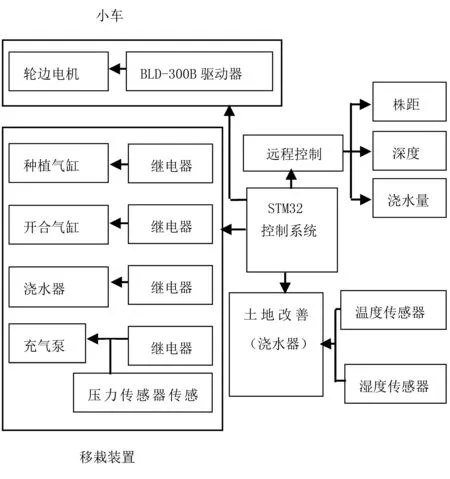
图6 智能移栽机控制系统框架图
4 试验及分析
4.1 试验条件
1)试验环境:在疏松的土壤上面进行试验,试验地面积15m×20m。
2)试验作物:小树苗(10~12cm)和钵苗(菜苗)(6~7cm)。
3)检测指标:①挖坑深度、珠距;②苗的直立度[15]:优秀为(90±20)°,允许倾斜(合格)为(90±60)°;严重倾斜(不合格)为<30°或>150°,埋没(不合格)为被土壤埋没。
4)种植参数:参数设计值如表3所示。

表3 种植参数设定值
4.2 试验方法
首先,操作人员在人机交互面板上根据植物苗情况设置好挖坑深度、株距等,开启移栽机进行工作。为了测量挖坑深度,在挖坑结束时,暂停工作,测量种植枪的插入深度,从而确定挖坑深度;株距为连续测量6棵小苗间的距离。
4.3 试验结果及分析
试验结果采用随机取样进行分析。对于挖坑深度,通过测量种植枪的挖坑深度,来确定实际挖坑深度和设定值的对比。取6组,将每组5个数据进行分析,分析结果如表4所示。

表4 挖坑深度的设定值和测量值对比
由表4可以看出:深度越小,偏差值越小;种植枪的挖人深度与设定深度的误差在10%以内,基本在1cm内,满足种植要求。
株距同样取6组,每组长20m,每组中连续取5株测量,试验结果如表5所示。
由表5可以看出:株距小,偏差大。因为株距是通过控制车轮转动的圈数来控制的,所以距离越小,误差越低;对于株距为100cm,误差距离基本在100以内,满足种植要求,而株距30cm的误差距离在5cm以内,也满足种植要求。

表5 株距的设定值和测量值对比
对于苗的直立度取6组,将每组10个数据测量进行分析,其中每种植物苗3组,各30株。试验结果如表6所示。

表6 直立度的测试结果
从表6中可以看出:两种植物苗的合格率一样,但菜苗的优良率高一些。因为菜苗是钵苗,且苗矮、坑浅,入坑较稳,压实力相对较小,所以苗的垂直度会好一些。树苗不合格那株是压实板边缘压到了树苗,使树苗过于倾斜;菜苗不合格那株是由于土壤较松,种植枪往上移动时,土壤回流把菜苗覆盖,剩几张叶子在外面。
5 结论
设计完成的集运输、挖坑、种植、压实和浇水为一体的小型智能移栽机,实现了植物苗的智能化远程种植。试验表明:挖坑深度和种植株距与设定值误差较小,满足种植的要求,且种植苗的合格率在96%以上。由于采用的气泵较小,种植效率虽比人工高,但比市场上的移栽机低。目前,移栽机还处于试验阶段,存在不稳定性,后续将进一步完善。
猜你喜欢
当代水产(2023年2期)2023-05-19
当代水产(2023年2期)2023-05-19
作文小学高年级(2023年2期)2023-03-13
小猕猴学习画刊(2021年8期)2021-08-27
当代水产(2021年4期)2021-07-20
趣味(数学)(2020年5期)2020-11-16
当代水产(2020年4期)2020-06-16
劳动保护(2018年8期)2018-09-12
纤维复合材料(2018年4期)2018-04-28
泰州职业技术学院学报(2014年5期)2014-02-28
