小型多功能旋转割刀式割草机设计
2020-10-17 01:04:32任兴涛唐灵飞仲建军
农机化研究 2020年10期
任兴涛,唐灵飞,仲建军
(洛阳职业技术学院,河南 洛阳 471003)
0 引言
在割草机问世之前,草坪的修剪主要工具是镰刀,放牧牛羊也是保持草地平整的重要方法。随着高尔夫球、网球及足球等运动的兴起,人们拥有平整美观的草地做运动场地的要求越来越迫切。1805年,英国人普拉克内特发明了第1台收割谷物并能切割杂草的机器,其由人工推动,不能实现自主化作业。目前,草坪割草机成为现代城市绿化的重要设备,但完全自主作业的割草机还较少,且自动化水平较低、割草作业质量较差。为了提高割草机的自动化和智能化水平,提高作业质量和效率,需要将更加先进的控制系统引入到割草机的设计上,实现割草机的多功能设计,对于减小割草机的体积和质量、提高作业灵活性和适应能力具有重要的意义。
1 旋刀式割草机及其自主导航系统设计
旋刀式割草机是常用的割草机型之一,目前大部分还是手推式设计,全自动化的旋刀式割草机还有待于完善。在设计旋刀式割草机时,首先要满足草坪割草农艺的要求,可以较好地适应草坪的面积限制,在进行割草作业时具有较好的灵活性和转向性。旋刀式割草机的重要部件是旋刀结构,旋刀通过螺母和螺纹固定在割草机的工作轴上,工作轴通过和发动机轴的连接输出动力,旋刀是随时可以更换的,其结构如图1所示。

图1 旋刀结构示意图
图1中,通过两个圆销孔对旋刀和轴进行定位。旋刀式割草机的结构较为简单,将其设计成自动化割草作业装置,具有较好的灵活性。为了实现其自主导航功能,可以将机器视觉技术和PID反馈调节技术引入到割草机的设计上,通过自动化设计可以使旋刀式割草机具有更小的结构和更多的功能,从而提高割草机的作业效果。
在割草机进行主导航时,首先需要对作业区域进行识别,主要采用机器视觉技术对割草区域目标进行图像分割;然后通过边缘检测计算割草面积,识别作业区域。在作业区域的识别过程中,通过PID反馈调节的方式对识别结果进行修正,最后输出期望得到的结果,完成作业区域的定位。定位完成后,利用自主导航系统对作业路径进行规划,实现自主作业过程。目标作业区域自主识别流程如图2所示。
2 基于神经网络PID算法的割草机智能化设计
在割草机自主作业过程中,割草机通过传感器可以对割草质量进行监测,也可以对自身故障进行诊断。当遇到漏割或者卡刀的情况,利用PID反馈调节系统进行自身的修复;如果修复不成功或者遇到紧急情况时,还可以通过远程控制的方法来调整割草机的作业姿态,提升其作业质量。在割草作业的过程中,小型多功能割草机在进行自主导航和自动作业时,往往会产生较大的偏差,甚至导致路径规划错误。本次采用PID调节控制器对自动化系统进行调节,其基本原理框架如图3所示。
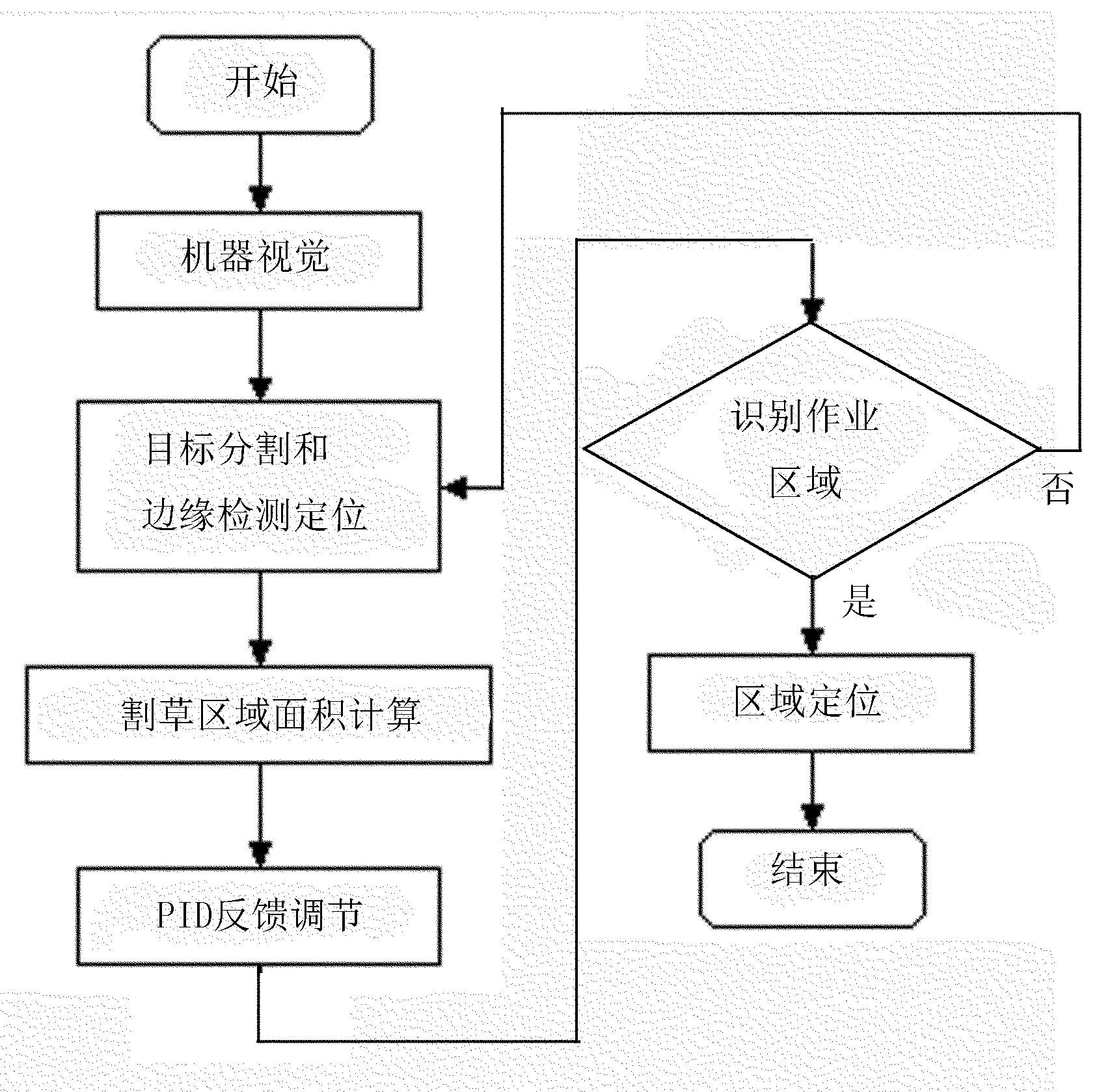
图2 目标作业区域自主识别流程

图3 PID控制器原理图
(1)
其中,kp为积分系数,ki为微分系数,kd为比例系数,T为采样周期,e为计算误差。为了进一步提高控制精度,可以采用神经网络算法对希望进行训练,以得到更加合理的反馈调节机制。图4为采用神经网络算法对PID参数进行训练的示意图。

图4 神经网络训练示意图
假设输入节点为x1、x2、xm,中间为隐含层i个,输出为l个,神经网络中含有神经元的个数为q个。在对调节系数kp、ki、kd进行训练时,训练样本的个数为个N,假设其中一个样本为p,对输入{xp}和输出{yp}进行训练,则隐含层的第i个神经元在样本p作用下输入为
(2)

隐含层第i个神经元的输出为
oip=g(netip) (i=1,2,...q)
(3)
其中,g()为激活函数。
对于Sigmoid型激活函数,则
(4)
其中,θ1为偏值,θ0的作用是调节Sigmoid函数形状的。隐含层激活函数g(netip)的微分函数为
g′(netip)=g(netip)[1-g(netip)]
(5)
隐含层第i个神经元的输出ojp将通过权系数的向前传播到输出层,并将第k个神经元记作1个输入,则总的输入可以表示为
(6)
其中,wki为隐含层神经元i与输出层神经元k之间的连接权值;θk为输出神经元k的阈值。输出层的第k个神经元的实际输出为
netkp=g(netkp) (k=1,2,...l)
(7)
g′(netkp)=g(netkp)[1-g(netkp)]=
okp(1-okp)(i=1,2,...,l)
(8)
如果通过神经网络训练最后的输出和期望得到的目标值tkp不一样,可以将误差反向传播,利用加权系数不断地进行调节,直到和期望的输出值一样为止。对样本p完成训练后,再用另一个样本进行训练,直到完成N个样本的训练。
3 多功能旋转割刀式割草机设计
旋转割刀式割草机是草坪割草作业中最常用的工具之一,目前采用的设计形式大多是手推式结构,完全自主行走自动化作业的旋刀式割草机也开始被应用到割草作业过程中,但设计技术还有待于成熟。非手推式旋刀式割草机的结构如图5所示。自动作业过程需要对草坪区域进行信息采集和路径规划,为了提高割草机的自主作业的质量,还需要引入各种控制系统。

图5 自动作业旋刀式割草机
为了实现旋刀式割草机的自动化作业,在割草机设计时需要使用各种自动化控制系统,包括传感系统、转换器系统、控制系统、导航系统及远程系统等。
1)传感系统。传感器通过采集外部的物理信息使效应器产生相关反应的设备,为了提高割草机的自动化作业水平,提高其对环境的适应能力,需要结合使用多种类型的传感器,如超声波传感器、接触传感器、热释电传感器等。超声波传感器主要用来测距,特别是遇到障碍物时,可以有效探测障碍物的距离,避免发生碰撞,测距也可以为割草机的路径规划提供数据支持;接触传感器主要是在遇到突发状况时,如碰到物体可以迅速的进行调整,避免造成自身和物体的损坏;热释传感器主要是对人和动物的保护,当捕捉到温度变化时,可以发出警报,这些传感器在割草机的设计上是必备的。
2)转换器。转换器主要是将采集得到的信号进行转换,可以实现数字信号和模拟信号之间的转换。传感器进行数据采集时,采集得到的割草机实时信息往往是强弱电流的形式,然后将强弱电流转换为模拟信号,最后利用转换器转换为计算机可以识别的数字信号。数字信号可以用来显示割草机的作业状态,也可以利用数字信号进行反馈调节。
3)控制系统。控制系统是割草机的核心部件,控制器主要分为两部分:一部分是对采集信息进行分析的模块,一部分是驱动割草机器人进行作业的模块。信息分析模块可以将传感器采集得到的信号通过分析和处理,转换为较为简单的信号传递给控制系统,控制系统通过反馈调节驱动割草机的割草作业模块。本次利用PID控制器进行反馈调节,并利用神经网络学习算法对调节过程进行训练,可以提高控制系统的控制精度。驱动模块接受反馈系统的控制信号后,将信号转换为模拟信号,驱动割草机器人进行割草作业。
4)导航系统。导航系统是实现割草机自主作业最重要的系统,利用机器视觉技术和传感器系统,割草机可以对待割草区域采集的图像进行识别,并规划行驶路线,且可以验证规划好的路线,进行自主行走。
5)导航系统。远程遥控系统主要是针对作业质量的监测而设计的,当出现作业质量下降或者突发状况时,割草机可以通过远程系统对作业姿态进行调整,以提高作业质量,避免作业事故的发展。
4 试验
为了验证本次设计的多功能旋刀式割草机神经网络PID调节系统的有效性,对割草机的性能进行了测试。首先,对视觉系统作业区域的识别准确性进行了测试,结果如表1所示。由表1可以看出:本次设计的系统具有更高的识别准确率。
为了进一步验证多功能割草机神经网络PID控制系统的可靠性,对系统的响应时间进行了对比,以系统响应到平稳输出为测试时间,结果如表2所示。由测试结果发现,采用神经网络PID系统具有更快的响应速度。这是由于采用神经网络对系统进行训练后,系统的响应更加灵敏,能够更快地达到平稳输出的目的。

表1 准确识别率测试

表2 系统响应时间对比
最后,对多功能割草机沿着规划路径行走的准确性测试,结果如表3所示。
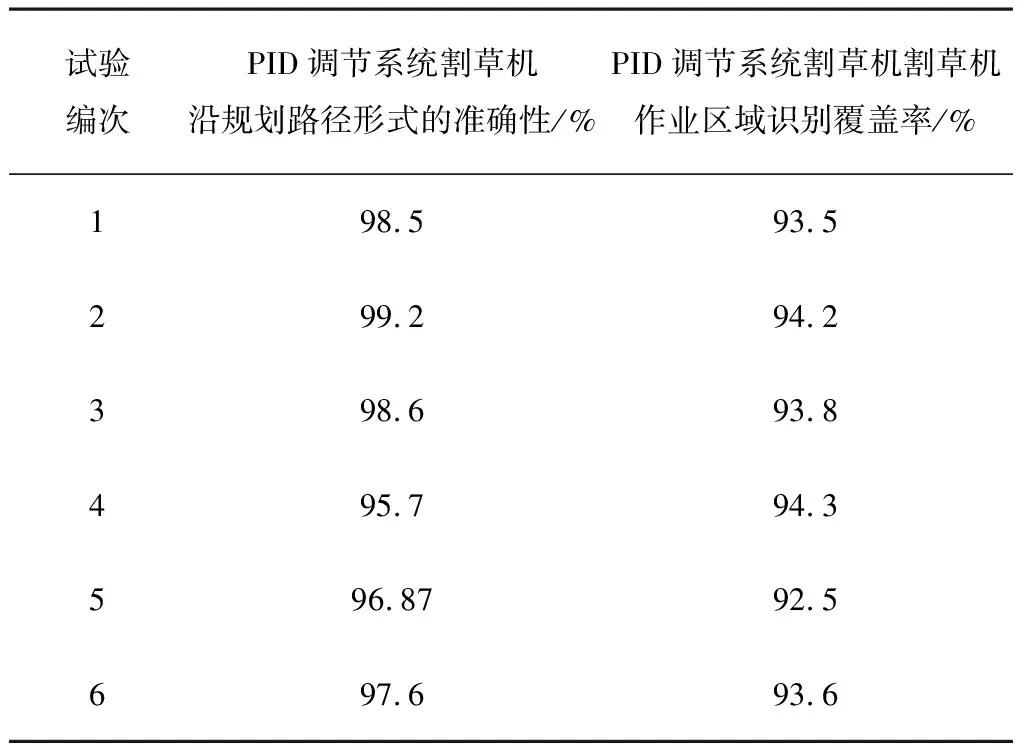
表3 自主行走准确性测试
由表3可以看出:设计神经网络PID控制系统后,导航系统沿路径形式的准确率更高,这是由于采用PID调节可以对实时行走误差进行纠正。当出现偏差时,监测系统通过将信号传递给分析系统,分析系统通过PID反馈调节将数字信号传递给驱动模块,驱动模块发出模拟信号来微调割草机行走方向,以使割草机沿着规划的路线准确地进行行走。
5 结论
为了提高割草机的智能化和自动水平,实现小型化割草机的多功能设计,将神经网络PID控制器引入到了割草机控制系统的设计上,通过神经网络训练和反馈调节可以有效地提高系统的响应速度和控制精度。为了验证方案的可行性,对割草机的性能进行了测试,包括作业区域识别的准确率、系统响应时间和自主导航的准确性,并将其和不用PID控制系统时割草作业性能进行了对比,结果表明:采用神经网络PID控制系统有效提高了控制系统的响应速度,以及作业区域识别和自主行走的准确率,对于自动化多功能割草机的设计具有重要的意义。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
民间故事选刊·上(2022年4期)2022-04-17 11:24:45
民间故事选刊(2022年7期)2022-04-15 03:19:18
自然杂志(2021年6期)2021-12-23 08:24:46
汽车维修与保养(2021年8期)2021-02-16 00:28:20
时代文学·上半月(2019年6期)2019-12-13 07:20:41
环球时报(2019-06-11)2019-06-11 06:17:18
现代装饰(2018年5期)2018-05-26 09:09:01
工业设计(2016年4期)2016-05-04 04:00:15
电源技术(2015年5期)2015-08-22 11:18:38