园林业小型树木一体式移栽机设计与试验
2020-10-17 01:04:32李宁
农机化研究 2020年10期
李 宁
(1.北京林业大学 机械电气工程学院,北京 100083;2.廊坊市自然资源与规划局, 河北 廊坊 065000)
0 引言
随着我国城市化建设进程的不断加快,城市街景和城市环境也得到了很大程度的优化,而盆栽的小树有着良好的装饰性和短期的适时性,比较适用于庆祝大型节日和美化城市环境[1]。因此,盆栽小树的自动植树装置的需求越来越大。与此同时,小规模植树技术的应用大大缩短了作物的生长周期,提高了作物产量,成为了现代温室植木生产的重要栽培技术。可以说,自动植入小型植树技术的研究开发,既是适应移栽小型树木生产的快速增长趋势的重要举措,同时也是促进我国农业朝着现代化发展的重要举措[2〗。根据移栽小型数目的高强度劳动、低效率、高成本的特点,发现小盆自动苗采集机构现有的问题主要是栽培不均匀[3]。通过分析国内外收集设施的现状,找出能够改善小型植树的自动苗采集机构的设计方法,改善苗的收集精度并实现自动化,开发出适合我国设施农业现状的苗采集机构。我国是以蔬菜和小规模的栽培为主体的设施农业的大国,园艺设施面积约为179km2,园艺设施面积和产量均为世界第一[4]。因此,树苗采集机构的开发和普及在我国有着广泛的市场需求和应用前景[5]。但是,对小盆栽树的自动苗采集机构的研究还存在很多问题,还处于初期阶段:①苗收精度和自动化机构未满足实际生产需求,苗采样机构的成功率基本上达到86%~97%,伤害率为2%~6%;但是实用化的成功率基本为82%~92%,伤害率为6%~12%。②农机和农艺脱节。由于我国小盆栽的移栽和育苗的不均匀,导致盆栽和盆栽实体无统一标准。孔托盘的尺寸从335mm变为266mm,且钵实体的尺寸也不同,导致小树移栽操作速度较慢,可靠性低,与农业快速发展的需求不相符。一般来说,在我国小型盆栽收集设施的适用范围非常小,部分蔬菜公司、小型木材公司、树苗均引进了外国产苗收获设备,但存在价格、复合操作、适应性等实用性问题[6]。
国内装置大都模仿外国移栽机构的摘苗装置,种苗采摘机构主要采用直接插入的针插入方式;但由于小树的叶子蔓延较大,从上面垂直生长较小的树木,采用针插入结构会使真正的叶子受到较大损伤,且使用系统夹类型也会因为不能很好地控制夹紧力而导致茎受到较大损伤。因此,本文通过对小型树木移栽机构的工作过程的解析,以现有的机构装置为基础,对小型树木移栽机构进行改进优化,以期设计出具有较优性能的小型树木自动移栽机构。
1 总体设计
小树移栽机构应模拟人手将小树苗从托盘中取出,移栽过程中在移栽轨道最低处释放它们,陆地机构重复上述动作。小树移栽机构由齿轮驱动部和移栽臂部构成。图1为小树移栽机构的运动简图,图2为移栽臂的结构图。齿轮传递的一部分由非圆齿轮、4个相同的椭圆齿轮、凹形和凸形止弧、行星框架构成,是能够实现不均匀间歇运动的游星齿轮列。移栽用臂主要由凸轮、叉子、弹簧板、弹簧杆、推杆、发针及苗爪等构成,通过旋转运动实现植苗、种苗的目的。移栽臂未取苗与夹紧小型树木钵苗时的状态如图3所示。图3中,移栽用臂能够不取苗而夹紧小树苗。当太阳齿轮被固定在框架上时,在它移动时行星框架逆时针旋转,同时驱动了行星椭圆齿轮和中间椭圆齿轮之间的咬合。凹锁弧线用针固定在中间椭圆齿轮上,凸锁定弧用针固定在太阳轮上,当凹形锁定弧与凸锁定弧匹配时,移栽臂相对于游星帧静止。移栽臂由键固定为行星轴,相对于行星框进行逆时针旋转和不均匀地旋转。在这两个运动合成下,移栽臂可根据所需角度位移及轨道运动获得必要的移栽轨道,以满足移栽合并后的小树自动移栽机构的轨迹。

1.非圆齿轮 2.凸锁止弧 3.凹锁止弧 4.中间椭圆齿轮 5.行星椭圆齿轮 6.移栽臂 7.移栽轨迹 8.穴盘 9.移栽体 10.传送带 11.行星架
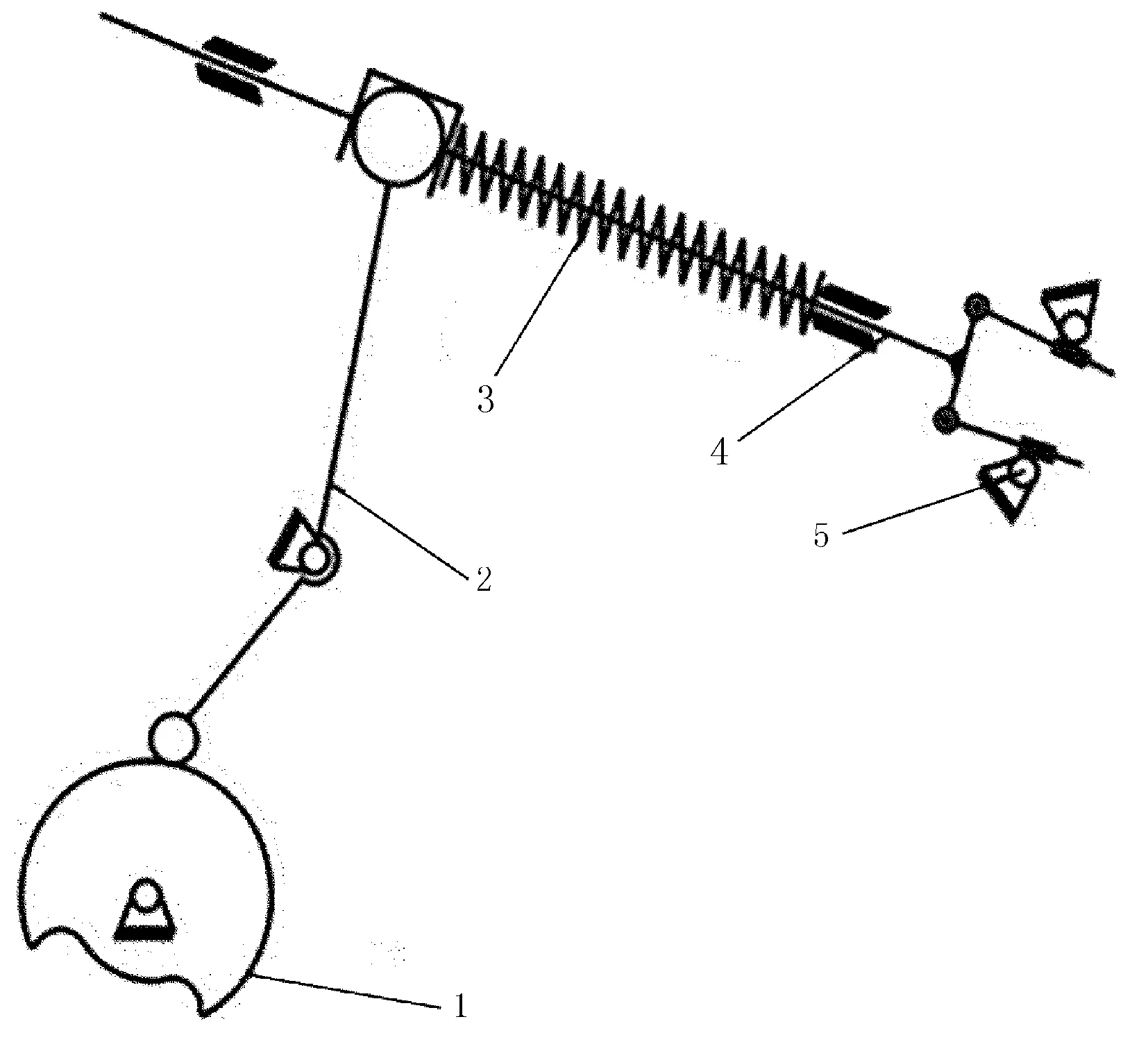
1.凸轮 2.拨叉 3.推杆 4.弹簧 5.夹苗针

图3 移栽臂未取苗与夹紧小型树木钵苗时的状态
小树木移栽机构由齿轮驱动部和移栽臂两部分组成,如图4所示。

1.行星椭圆齿轮 2.凹锁止弧 3.中间椭圆齿轮 4.太阳轮 5.凸锁止弧 6.齿轮箱体
齿轮箱作为逆时针方向的游星框旋转,以驱动齿轮机构和移栽臂以完成移栽。图5为齿轮驱动装置的结构图,图6为输送臂的结构图。
2 主要结构及参数设计计算
2.1 主要功能介绍
根据移栽机构的最佳设计目标及参数的运动学模型,开发了辅助解析和优化移栽机构的软件。优化软件初始界面如图7所示。图7中,软件的初始接口由4个部件构成,即菜单和编辑栏、图形显示区域、参数输入区域及结果输出区域。
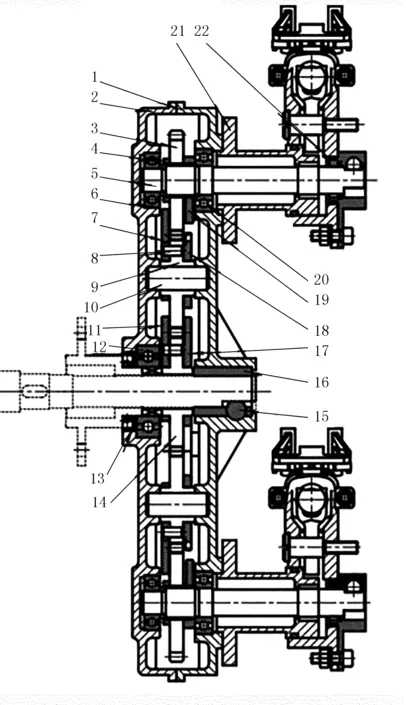
1.螺丝 2.齿轮体 3.行星齿轮 4.轴套 5.行星轴 6.轴承 7.缓冲装置 8.定位销 9.中间齿轮 10.中心轴 11.太阳缓冲装置 12.轴承 13.轴承 14.太阳轮 15.锁紧销 16.中心轴套 17.凸锁止弧 18.凹锁止弧 19.消除齿隙凸轮 20.轴承 21.凸轮 22.移栽臂

1.夹苗针 2.苗爪 3.转动片 4.苗爪固定部分 5.移栽臂壳体 6.弹簧座 7.拨叉 8.顶盖 9.推杆 10.连接杆
1)菜单及编辑栏。菜单及编辑栏如图8所示。菜单栏包含“文件”“编辑”“参数计算”“功能选项”“视图”“出口”按钮。其中,“文档”、“编辑”、“视图”、“退出”是普通按钮,在此省略详细内容。工具栏包含“打开”“保存”“复制”“剪切”等快捷方式。

图7 优化软件初始界面

图8 菜单及编辑栏
功能选项下拉菜单如图9所示。“功能选项”的下拉菜单包括“移栽机构的初始位置”“米穗移动的移动趋势”“米穗相对运动状态的模拟”“稻穗的绝对运动”“稻穗的相对速度曲线”及稻穗尖端的相对加速度曲线。图10为移栽机相对移动过程。其中,椭圆曲线为椭圆形齿轮的间距曲线被保存,并提供重要数目以供后续分析。

图9 功能选项下拉菜单

图10 移栽机构运动的相对模拟
2)图形显示区。图形显示区域可在输入参数下实时显示小树移栽机构的相对运动,当输入参数发生变化时,设计者便于调整参数,能够及时掌握移栽轨道的变化和移栽臂的姿势。
3)参数输入区。该区域展示影响小托盘移栽机构轨道的8个主要参数,包括与其相关联的3个参数。其余参数的意义如下:N为与不完全的非圆形齿部分对应的中央角,H为小树的间隔,W为中心轴的角速度,Xa为孔托盘的横轴,Ya为孔。盘的垂直坐标、从行星轮的旋转中心到实生针的垂直距离、凸锁的圆弧半径与第1中心距离的比,以及实生销的后退时间为H1。设计者可以通过参数文本框直接修改参数,或利用文本框旁边的微调按钮来调整参数[7]。
4)结果输出区。该区域主要包括轨道高度、从初始位置到树苗位置的角度、从椭圆的中心到焦点的角度、从行星椭圆齿轮到行星框的角度及初始角度,如图11所示。通过分析输出参数,可以及时确定参数调整的方向,并且能够迅速获得满足优化目标的最佳结构参数组。

图11 结果输出区
2.2 a对移栽轨迹的影响
a值的变化直接影响中央椭圆齿轮和行星椭圆齿轮的中心距离大小,如图12所示。图12中,与a值对应的移栽轨迹是24、25、26mm。图12中,当移栽轨迹由24mm增加到26mm时,苗的采摘角度逐渐降低,树苗的栽培角度逐渐增加,并根据移栽轨道的必要条件而增加。因为要满足自动移栽机构的要求,整棵移栽需要充分的长度,所以a值必须足够大。

图12 a对移栽轨迹的影响
2.3 k对移栽轨迹的影响
K为椭圆短轴的长轴比,其对移栽轨迹的影响如图13所示。当K为0.99、0.995、0.999时,K主要受到位置、平滑度、角度的影响。如果K由0.99增加到0.999,移栽轨道左侧的轨道变大,移栽苗的角度变大,苗的移栽位置变大。
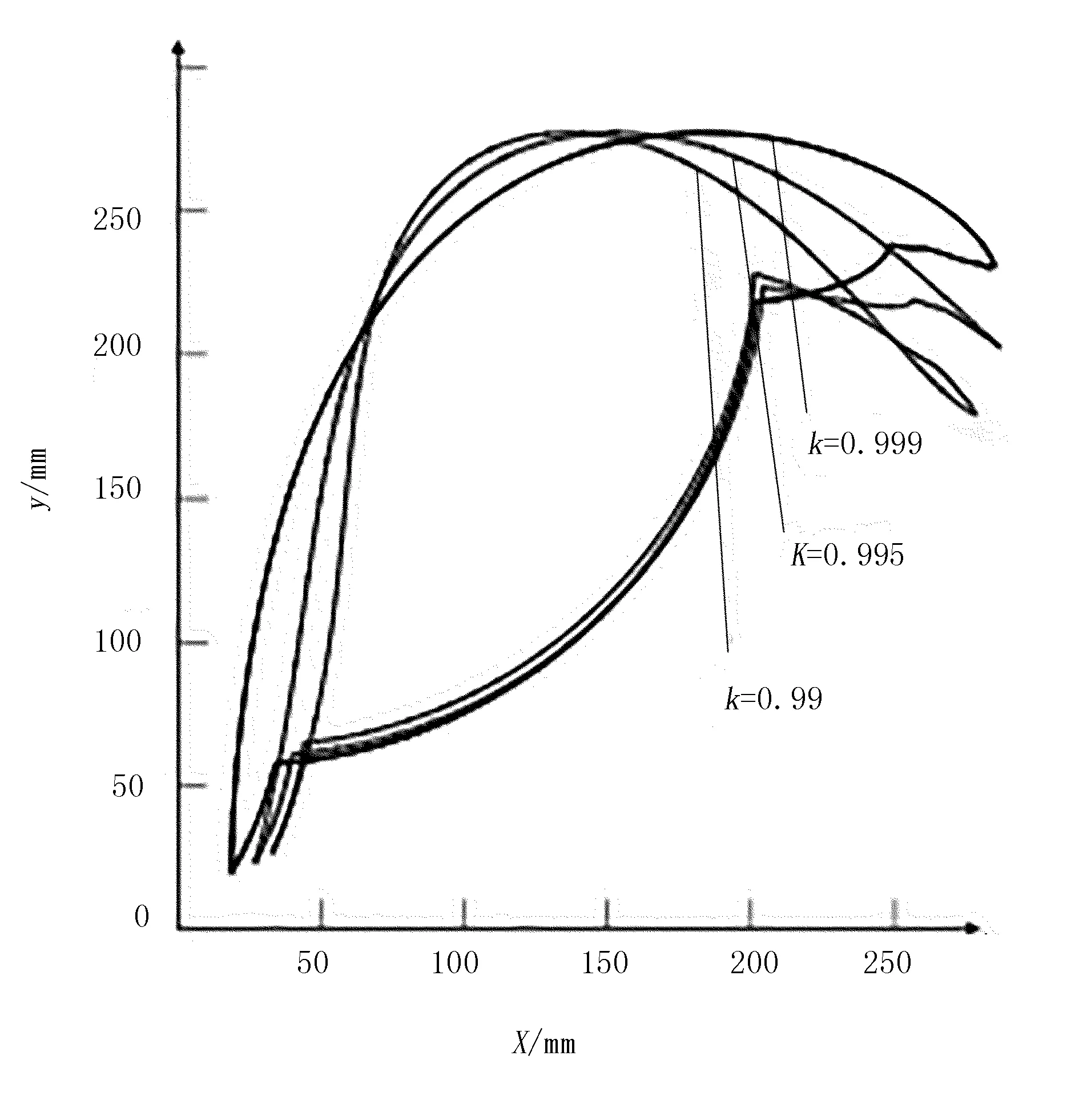
图13 k对移栽轨迹的影响
2.4 a0对移栽轨迹的影响
a0表示移栽扶手的初始设置角度。当a0值为25°、30°、35°时,对应的移栽轨迹如图14所示。a0为25°~35°时,植林轨迹的苗采部由轮状的背包向尖锐的嘴变化,逐渐满足移栽轨道的要求[8];随着实际生选拔阶段的轨迹长度由25°增加到35°,苗采摘阶段的轨迹长度变小,实生深度变小,苗的深度变小。因此,应当考虑这3个因素来确定选择值。
图14 a0对移栽轨迹的影响
2.5 b0对移栽轨迹的影响
小托盘移栽机构的游星支架的角度是由非圆形齿轮的旋转中心线、初始的第1中间椭圆齿轮及第1行星椭圆齿轮的旋转中心线形成的角度,如图15所示。

图15 b0对移栽轨迹的影响
如果具有与移栽轨迹对应的24°、25°、26°的值,那么移栽轨迹的取苗角度及栽苗角度均会受到影响。24°~26°时,全周轨迹逆时针旋转,实生采集角度逐渐减小,但采集效果不佳,实生栽培角度也逐渐增大;实生耕耘角度不可逐渐增大,否则苗木栽培的直率不好。因此,为了使苗的角度变小,有必要选择合适的值,要确保实际效果良好,苗的角度应适当。
2.6 参数优化的结果
通过分析这些参数对移栽轨道带来的影响,使用VB优化解析软件来求出满足最优化目标的小型树木移栽机构参数集合。优化后的参数为:a25.0576k0.995n2753025,60,Smm160,bs1276。该组参数下夹苗针尖点的运动轨迹如图16所示。
图16 优化后的机构移栽轨迹
由图16可以看出:实生区划的轨迹是小树苗从壶中取出时形成笔直出入的“尖嘴”形;秧苗部分的轨迹与托盘大致垂直,且托盘的长度是33mm,苗的角度是约33.88°;种植树苗的角度约为70°,其轨迹的高度为256.78mm。通过观察小树移栽机构的相对运动模拟可知:在移栽过程中,移栽臂与销、霍尔特雷没有干扰,优化结果满足优化目标。
3 机具的实际效果及创新点
为了降低研究开发费用,缩短研究开发所需时间,在开发物理原型之前进行了移栽装置的虚拟原型试验。结果表明,可以事先验证被移栽机构是否满足移栽操作的要求。另外,通过虚拟原型模拟结果可以改善局部移栽机构。为此,利用SolidWorks将移栽机构的所有构成要素进行整合,实施虚拟零部件,导入亚当斯、虚拟原型解析软件,进行3D实体模型的基本模拟,建立原型解析聚焦轨道的移栽机构的实验。为了验证小型木移栽机构设计的可能性,将轨道与理论轨道进行了比较。
3.1 空转实验
1)在实验长椅上设置小树的组装自动移栽机构,调整中心轴上的火箭和马达火箭在同一平面上的安装位置;通过点击NCH,检查机制和测试之间是否有干扰,用手旋转木移栽机构;观察之间是否有干扰因素NCH,如果干扰继续调整移栽机构的位置。
2)实验使用的设备是手机照相机。移动电话被设置在适当位置,整个图像显示树的移栽机构。调节位置和光的强度,能够清楚地看清机械装置的危急点[9]。
3)利用控制箱运行马达,将马达的速度调整为20r/min,在机构的圆滑操作(2~3周期获得)后开始图像获取。
4)利用图像分析软件对采集到的图像进行处理及分析,得到小型树木移栽机构夹苗片尖点的运动轨迹,如图17所示。

图17 取栽一体式花卉自动移栽机构运动轨迹对比
实验后,移动摄像机得到了影像,影像根据框架数分成了约100张,连接各图像中的小树移栽机构的危急点,获得小树移栽机构的临界点轨道。其中,图17(a)为成像轨迹,图17(b)为虚拟模拟轨迹,图17(c)为逻辑轨迹。比较3个轨迹,可以得出以下结论:①照片轨迹与理论轨迹基本一致,差异在于理论轨迹的尖端部分不光滑,是由于自动移栽机构的存在。在以图形方式设计的1对缓冲装置中,能够大幅降低卸下凹形的凸状锁定时的冲击力,产生轨迹前端部的光滑度的差。②照片实验中,移栽机构满足小树植林机构的轨道和姿态等农业条件,验证了理论设计法的实现可能性。
3.2 传送带横向移栽实验
为保证移栽壶在苗箱下顺畅通过,传送带应变更为横向传输,如图18所示。在移栽过程中,由于生长的叶子过大,移栽的壶上的爪子移栽到移栽盆中后,会捕捉叶子,采集了生长的叶子。
相关问题解决后,小型树木移栽机构调到初始位置,穴盘中放置钵苗,在PLC控制柜中输入如下参数:传送带速度113.5r/min,托盘速度100.0r/min,苗托盘的速度7.0r/min,苗爪的旋转自动速度为 15.0r/min,实生托盘总数为16条,苗托盘的停顿时间为1.5s。之后,切换到自动驾驶模式,按零确认后自动确认;最后,按开始按钮开始移栽实验,验证了实现小规模自动植林机构的可能性。

图18 传送带横向放置
3.3 实验结果分析与改进方案
1)小型植木机构的轨道长度应满足试验台长度的要求,否则移栽后的移栽水壶会填满幼苗箱下的铝薄膜,导致移栽水壶倾倒。
2)在收获幼苗过程中,由于合并小木自动移栽机构的移栽模式与研究小组以往设计的移栽机构的模式不同,因此会产生与链条之间的干扰。
3)在移栽盆栽成功种植盆栽时,由于苗叶比脚之间的距离大,如果脚向上移动,盆栽的苗就会同时从花盆中取出,移栽失败。改进方案:①在设计中,增加椭圆轨道长轴值a来满足整个轨道长度所需要的条件;②适当延长s的长度,指甲的长度和剪刀羽毛变长,模式的冲程不变,则推杆被推出时链子不碰链条销;③效仿欧洲、美国的移栽技术,不考虑受害叶的情况,以相反的移栽方向设计机构。
4 结论
1)根据国内外小型树木移栽机构的研究情况,以小型树木移栽机为基础,解决了苗木布局不规范、低苗采摘精度不高、多道工序运行等问题。
2)讨论了小型树木移栽装置的运动原理和运动学特性,创建了小树移栽机构的运动学模型。基于数学模型、Visualbasic6.0开发了辅助分析和优化软件。
3)基于SolidWorks,构建并组装了整合小木自动移栽机构的三维模型,并导入虚拟模拟软件,进行了运动学模拟实验,取得了苗剪辑尖端的运动轨迹,验证了理论结果的适当性。
4)进行了横向移栽试验及垂直移栽试验,取得了苗剪尖端的移动轨迹和盆栽的移栽试验结果,验证了合并小特里移栽机构的可行性,找到了现有小型树木移栽机构的缺点,进行了改进设计。
猜你喜欢
数学杂志(2022年5期)2022-12-02 08:32:10
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:38
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
中学数学杂志(2019年1期)2019-04-03 00:35:42
读者(2018年20期)2018-09-27 02:44:48
福建中学数学(2016年4期)2016-10-19 05:09:02
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
红领巾·萌芽(2014年1期)2014-12-01 09:09:01
创新作文(1-2年级)(2014年5期)2014-07-19 02:33:12