
果园履带式多功能作业机的研制
2020-10-17 01:02:06王学良范国强宋月鹏徐文英张晓辉沈典诰
农机化研究 2020年5期
王学良,李 强,范国强,宋月鹏,徐文英,张晓辉,沈典诰
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018;2.山东省园艺机械与装备实验室,山东 泰安 271018;3.泰安市山立机械设备有限公司,山东 泰安 271000)
0 引言
我国是世界第一大水果生产国和消费国,林果业是农民增收致富的一条重要渠道。但是,我国果园主要分布在丘陵山地,地形复杂多变,现有的轮式作业机械抗倾翻能力差,转弯半径大,难以适应丘陵山地等复杂地形[1-3]。果园管理中的植保、开沟施肥和除草作业具有劳动量大和季节性强的特点,随着劳动力成本的不断升高,果园管理机械化的需求也越来越迫切[4]。近几年出现的微耕机等小型机具主导了丘陵山地农机的发展方向[5],但微耕机作业效率不高,难以适应规模化种植的需求。新疆机械研究院研制了一种手扶式履带多功能果园作业机,但其植保作业还是依靠果农手持喷杆作业,无法实现开沟施肥和除草的机械化作业[6]。与此同时,我国果农的购买能力不强,如何提高主机的配套率也是亟待解决的问题之一。因此,研制一种适合丘陵山区果园植保、开沟施肥和除草作业的果园多功能作业机对于提高我国果园管理的机械化水平具有重要的意义。
履带式车辆具有较大的爬坡能力和附着能力,对复杂地形适应能力强,且具有重心低和抗倾覆能力强的特点[4-9],特别适合丘陵山地复杂地形条件下的作业。为此,设计了一种中等功率的履带式液压驱动果园作业机,为提高机具的配套率,还设计了简单可靠的悬挂装置,实现了多种作业装置的快速更换。
1 整机结构与工作原理
1.1 主机结构设计
该履带式果园多功能作业机行走与工作部件均采用液压系统进行驱动,主要由车架、动力系统、履带行走机构、悬挂装置和控制装置组成,拆去座椅的整机结构如图1所示。

1.附具液压马达 2.双万向联轴器 3.挂接板 4.机具齿轮泵
动力系统主要由柴油发动机、齿轮泵和液压油箱组成,位于作业机的中后部、驾驶座椅的后下方,为整机提供动力。作业车车架通过销轴和螺栓与两侧的履带机构相连,履带行走机构处于作业的底部,由液压马达驱动行走。悬挂装置主要由机具提升液压缸与挂接板构成,铰接在作业机后部,机具液压马达安装在作业车的后部,带动一条双万向联轴器为作业装置提供动力。控制装置的主要部件是液压阀,行走控制阀处于驾驶座椅的前部,作业装置控制阀处于驾驶座椅的右侧。平地铲处于作业机的前端,为了平衡整机,在作业机的前端挂接了配重,根据作业装置的不同,可调节配重的数量。
由于该作业机采用履带行走机构和如图1所示的零部件布置方式,使得该机质心高度大大降低,质心高度仅为0.6m。通过调节配重,可使质心处于车体中部,极大提高了整机的抗倾翻能力。
根据我国果园的实际情况,整机主要目标参数如表1所示。
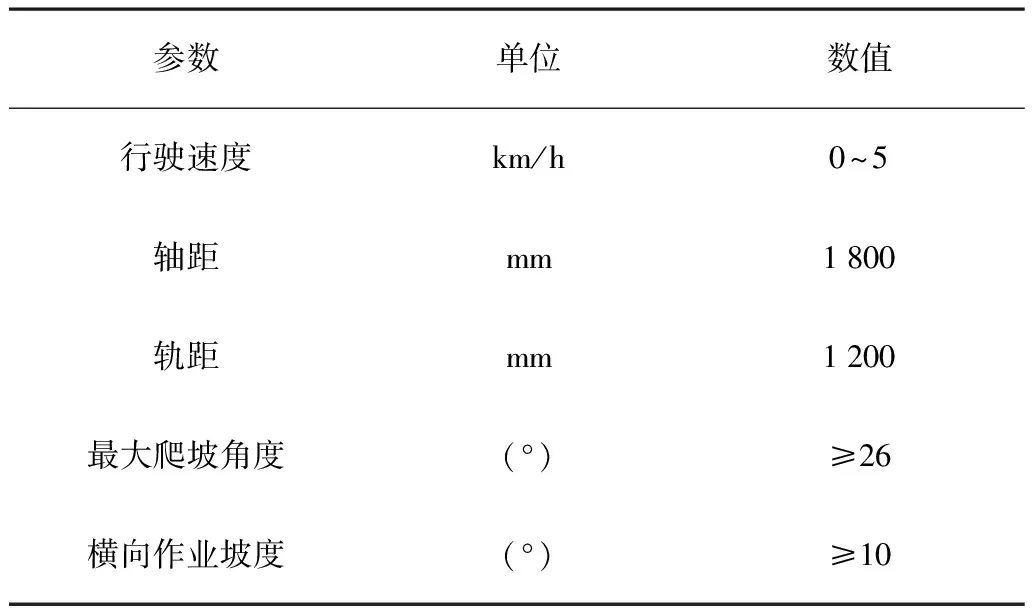
表1 履带式果园多功能作业机主要目标参数
1.2 工作原理
为提高操作性能和驱动力,作业机采用液压系统进行驱动,液压系统原理如图2所示。
1.2.1 行走转向原理
柴油发动机带动行走齿轮泵为履带行走系统提供高压油,行走转向控制阀组为双联三位六通手动换向阀,分别控制左行走马达和右行走马达的转向。双联阀芯处于中位时,液压油回油箱,行走马达不转,作业车静止;双联阀芯位置同时处于左方或右方时,两马达转向相同,作业机前进或后退;双联阀芯位置分别处于左方或右方时,两马达转向相反,作业机左转或右转。
1.2.2 作业装置悬挂原理
为提高机具的配套率,实现多种机具的快速更换,设计了简单可靠的悬挂系统,如图3所示。

1.滤油器 2.行走齿轮泵 3.溢流阀 4.平地铲液压缸 5.换向阀Ⅰ

1.割草机 2.螺栓 3.机具挂接板 4.车载机具挂接板
车载机具挂接板前端下部铰接安装在整车尾部下方的固定铰接座上,两条机具提升液压缸的前端铰接安装在车体尾部上方,机具提升液压缸的后端铰接在车载机具挂接板前端的上部。图2中的换向阀Ⅲ为三位六通换向阀,通过改变阀芯位置实现机具提升液压缸的伸缩,进而调整机具挂接板的倾斜位置,实现对后端悬挂机具作业高度和位置的调整。
车载机具挂接板后端上部焊接两个挂接耳,机具挂接板的上部焊接了2个挂接销,可以挂接在车载机具挂接板的挂接耳上。机具挂接板的下部加工了2个U型槽,连接螺栓穿过机具挂接板和车载机具挂接板,将机具与车体连接在一起。
1.2.3 作业装置调整与驱动原理
换向阀Ⅰ为三位六通换向阀,通过改变阀芯位置实现平地铲液压缸的伸缩,可以调整平地铲高度,实现平地作业。机具液压马达安装在作业车的后部,带动一条双万向联轴器为作业装置提供动力。换向阀Ⅱ为三位六通换向阀,通过改变阀芯位置改变机具液压马达转向,适应不同机具对转向的要求。
2 主要零部件设计
2.1 行走驱动液压系统的设计
履带车辆行驶在松软地面时,由于土壤压实和流动而造成较大的能量损失,所以需要较大的驱动力[8-9]。车辆转向和爬坡时的驱动力矩和功率较大,根据设计参数选取两者的最大值作为行走系统的最大驱动力矩和功率。
研究表明,履带车辆转向时受到的力主要为滚动摩擦力和转向滑动摩擦力[11],转向阻力为
(1)
式中G—车辆质量(kg),G=2 200;
f—滚动摩擦因数;
μ—滑动摩擦阻力系数;
L—履带接地长度;
B—轨距。
取滚动摩擦因数f为0.11,转向阻力系数μ为0.7,代入式(1)得fq=6 845N。
爬坡角度≥30°,则爬坡驱动力为
Fq=9.8G·(f·cosα+sinα)=11584N
(2)
已知驱动轮半径r=0.12m,则需要的最大驱动力矩为
Tq=Fq·r=1390N·m
(3)
单个液压马达需要的排量为
(4)
式中Tq—马达驱动力矩;
ΔP—马达进出油口压力差(MPa),ΔP=16;
ηm—马达容积效率,取0.95。
因此,最终选取2个GMS-305型摆线液压马达满足驱动需求,马达排量为305mL/r。
当时速为5km/h时,马达转速nm为
nm=v/(60·π·d)=111r/min
(5)
初选发动机额定转速为2 200r/min,则需要行走齿轮泵的排量为
(6)
其中,Vcx为齿轮泵的排量;ηc为齿轮泵的容积效率,取0.95。
最终选取型号为CB-FC32-FL的齿轮泵作为行走泵,泵的排量为32mL/r,系统最大流量为70.4L/min。
行走系统爬坡时的最大功率Pq为
(7)
2.2 作业装置传动系统设计
目前与拖拉机配套的果园作业机械已经比较成熟,根据果园作业的要求,选取市场上常见的背负式风送喷雾机、开沟机和双圆盘割草肥田机,3种作业装置性能参数如表2所示。

表2 作业装置主要性能参数
3种作业装置的输入转速为540~720r/min,以最大输入功率为18kW进行设计,则所需机具马达最大输出扭矩为
Tj=9550·P/n=318N·m
(8)
需要的机具马达排量为
Vmj=2π·Tj/(ΔP·ηm)=130mL/r
(9)
最终,选取BMP-160型摆线液压马达满足驱动需求,马达排量为160mL/r。。
发动机额定转速为2 200r/min,需要机具齿轮泵的排量为
Vcj=nmj·Vmj/(2200·ηc)=33.6mL/r
(10)
最终,选取型号为CBHZA-F36-FL的齿轮泵作为机具齿轮泵。
2.3 发动机选取
行走系统爬坡时的最大功率为20kW,机具最大输入功率为18kW,最终选取额定功率为37kW、额定转速为2 400r/min的YN25GB型柴油发动机为整机提供动力。
3 试验
为了验证多功能作业车的各项性能,在山东农业大学南校区进行了试验。本次试验悬挂了割草机、弥雾机和开沟机3种不同附具,开沟与割草试验如图4所示。


图4 样机田间作业试验
试验中作业车运行平稳,动作控制可靠,实现了预期的各种工作,各种工况下实测结果如表3所示。由表3可以看出:整机各项性能指标达到设计目标要求,综合性能良好。

表3 多功能作业车试验数据

续表3
4 结论
1)针对轮式拖拉机难以适应丘陵山地复杂地形作业的问题,设计了一款果园履带式多功能作业机。通过对整机结构的优化配置,使得该机具有较大的爬坡能力,且具有重心低和抗倾覆能力强的特点,特别适合丘陵山地复杂地形条件下的果园管理作业。
2)为提高机具的配套率,实现多种作业装置的挂接,设计了由挂接板、挂接耳、挂接销、螺栓和机具提升液压缸组成的悬挂系统,具有简单可靠的优点。
3)为了减小机器的体积,提高操作性能和驱动力,本机行走与工作部件均采用液压系统进行驱动。针对该机型设计了相应液压系统,确定了关键零部件的型号,以满足驱动、机构调整与作业装置工作的要求。
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
北京航空航天大学学报(2022年6期)2022-07-02 01:59:30
学生天地·小学低年级版(2019年10期)2019-12-30 01:50:33
家教世界·创新阅读(2019年11期)2019-12-10 09:22:04
学生天地(2019年28期)2019-08-25 08:50:46
作文与考试·小学低年级版(2019年7期)2019-04-17 18:53:10
电子制作(2016年19期)2016-08-24 07:49:48
橡胶工业(2015年1期)2015-07-29 08:33:58
中国塑料(2014年2期)2014-10-17 02:51:06
筑路机械与施工机械化(2014年2期)2014-03-01 02:57:59
