
一种自动采摘结构模型有限元研究
2020-10-17 01:01:58刘灿
农机化研究 2020年5期
刘 灿
(浙江工业职业技术学院,浙江 绍兴 312000)
0 引言
近年来,随着计算机技术不断向农机化设备延伸,我国的自动采摘水平得到了较大的提升。为加快智能采摘设备的性能发展与研究创新,智能识别、准确化控制领域均取得较为显著的成效,且CAD/CAE技术亦被相继引入。有限元作为其重要的分支,主要特征体现在可以通过参数条件设置获取设备各组件的工况状态及应力分布等。为此,拟在借鉴相关专业文献的基础上,以整体优化自动采摘机的结构为目标,针对自动采摘机的核心结构模型展开研究。
1 自动采摘组成及原理
农业果蔬采摘机器作为替代人工采摘的工具,其采摘工作原理为:对采摘目标进行图像识别与信息数据转换,传至采摘控制系统;控制指令在后台预先依照采摘规划路线输入,并对接收到的采摘图像编译后通过采摘机器的执行机构开始采摘作业。因采摘需要转动和摆动的单一或多个组合实现,故电机作为驱动装置尤为重要。应用较为广泛的自动采摘机器工作流程(见图1)可简要描述为:首先进行程序初始化,在不断靠近采摘目标的过程中,机械伸缩机构动作,传感器进行采摘信息的接收与判定,通过采摘机器夹持装置张开、定位、闭合、返回顺序实现采摘。
2 有限元分析
2.1 数学模型建立
针对线性化的结构采摘系统,建立其频率与模态振型数学模型为
(1)
式中M—采摘结构的振动系统质量;
C—采摘结构的振动系统阻尼;
K—采摘结构的振动系统刚度矩阵;
f(t) —采摘结构所受的激励矩阵;
ω—采摘结构的简谐的圆频率;
{x}—采摘结构的系统节点位移振幅列向量。
由式(1)进一步推导出采摘结构模型的特征方程,即
[K]-ω2[M]=0
(2)
以避免采摘机的各核心部件作业过程中共振现象为有限元研究目标,利用专业处理软件对采摘部件的集成与耦合进行算法实现,将结构模型离散化处理,得出
(3)
式中Kij—采摘结构的单元刚度矩阵;
Bij—采摘结构的单元应力、应变关系矩阵;
D—采摘结构的弹性矩阵;
v—采摘结构的运动速度。
2.2 采摘关键结构建模
以自动采摘机器的采摘臂为例,给出如图2所示的建立三维物理模型主要步骤,完成协调性强的整体结构建模。
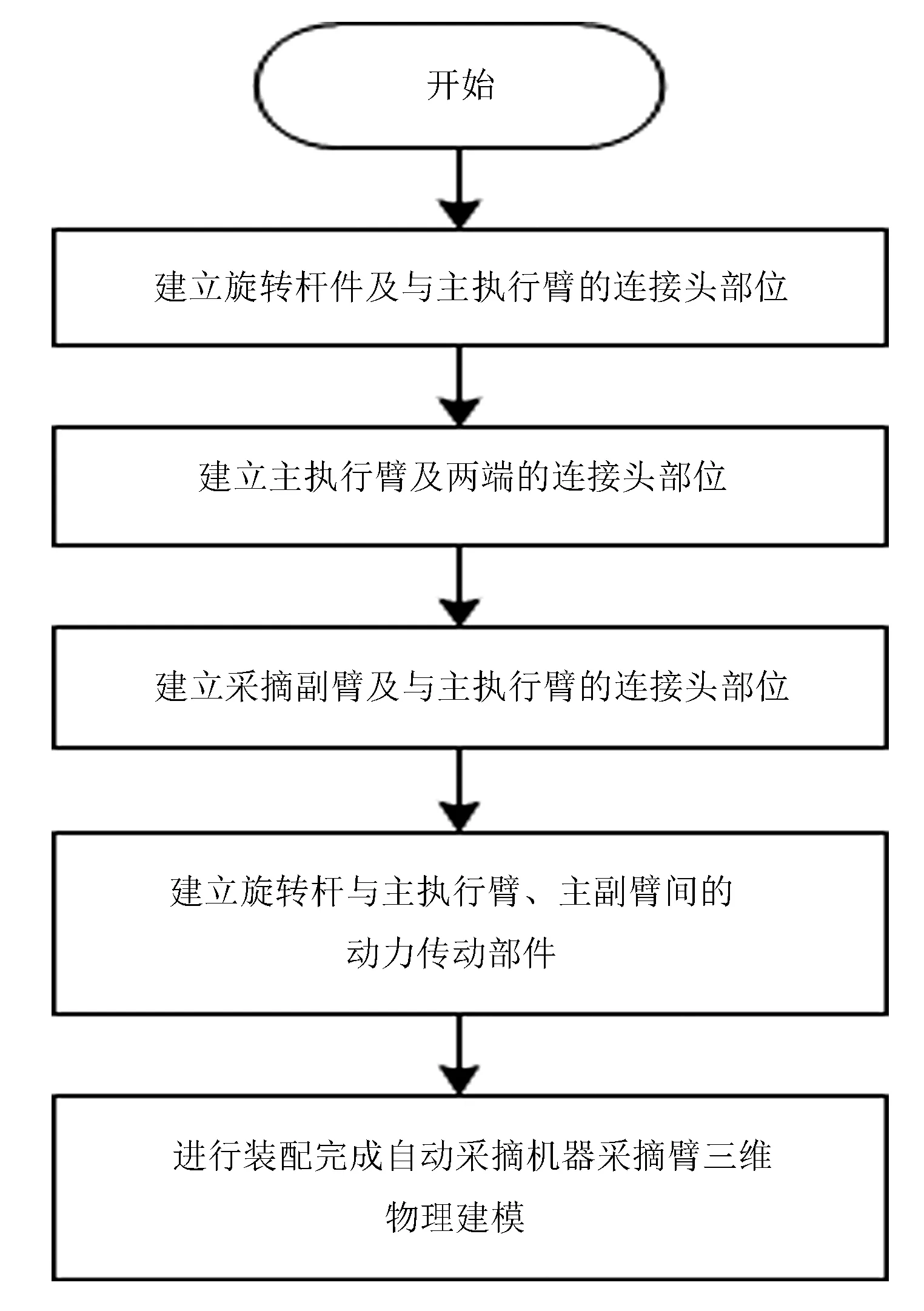
图2 自动采摘机械臂的三维物理建模主要步骤
该建模原则在于将采摘机械臂进行功能性部件划分,在旋转杆件、主执行臂、连接头及副采摘臂等多个部件的协调组合下精确装配,首先利用UG绘图功能完成各部件的单独结构设计,之后进入装配模拟环境达到三维物理成型。
进行采摘结构模型的有限元分析,执行控制算法是实现三维结构与有限元研究的关键桥梁,如图3所示。优化控制算法对最优解进行判定,符合条件按照计算精度要求输出进入有限元分析模块,不符合最优解则需对参数模型进行修改、相应关联的模型文件与约束条件进行优化,重新确定目标函数再次求最优解。
确定了有限元控制分析算法之后,针对采摘作业特性及采摘机器的结构组成,给出如图4所示的结构模型分析流程。从前处理、核心有限元计算分析和后置处理3大模块分别进行设置,确保分析流程的各环节互相作用,得出符合实际的有限元计算结果,进而指导采摘机器结构的布局与优化。
3 有限元试验
3.1 条件设置
进行有限元试验,首先通过文件格式的匹配与转换,将建立好的自动采摘三维结构模型导入ANSYS软件,并设置试验条件如下:①保证结构建模精度的前提下,对模型进行处理,如孔类、倒角等的合并、简化等;②对一些非承载的部件位置进行忽略;③分部件装配连接处考虑功能性材料特性计算。
以自动采摘机器的结构密度分布均匀性为假设,选取采摘支撑臂和采摘机器的驱动电机机座为分析对象,形成对其核心部件的材料性能参数选取表(见表1),涉及有限元模型分析的主要参数包括弹性模量、泊松比及屈服强度等。

图4 自动采摘结构进行有限元分析流程图
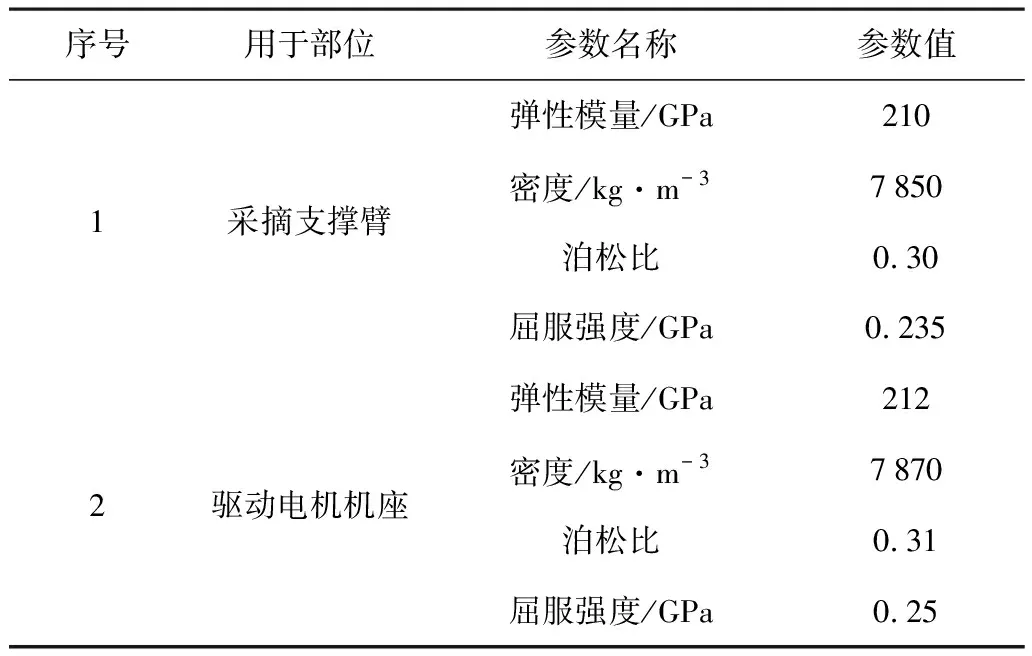
表1 自动采摘机的核心部件材料性能参数选取表
网格划分的处理与网格质量是决定该采摘机器核心部件实现有限元分析精确度的前置条件,根据标准化的有限元模型网格划分流程(见图5),在如图6所示的Mesh Tool界面进行网格划分的逐步设置。
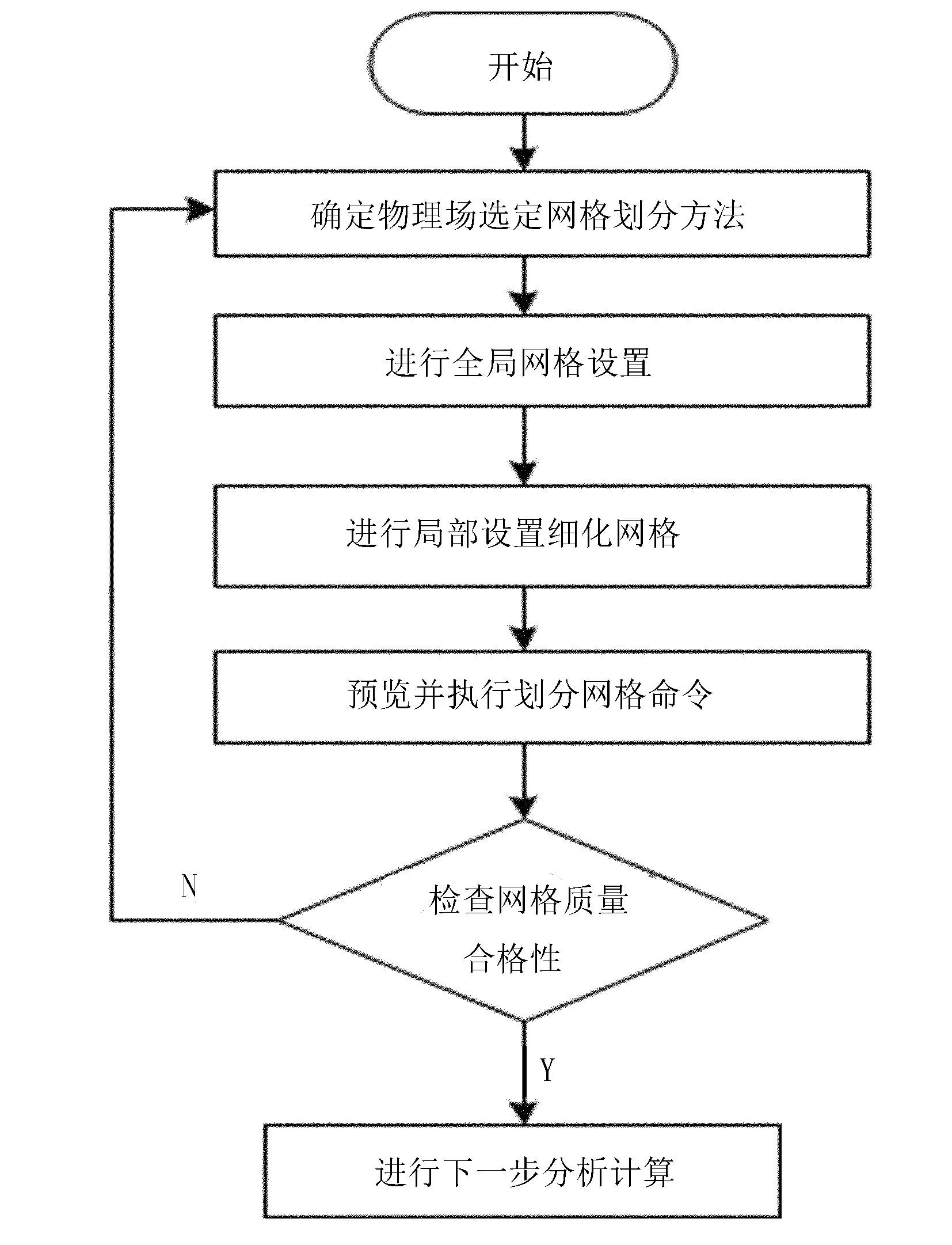
图5 有限元模型网格划分流程简图

图6 自动采摘结构模型有限元分析中的网格划分设置
在形状不规则、变形复杂未知的位置选用高阶单元进行网格划分,同时保证网格数量适宜。在保证计算精度的条件下,兼顾迭代时间和分析效率,同时注意处理过渡单元的约束与高低阶单元转换,最终划分驱动电机的机座模型为201 389个节点和120 387个单元,采摘机械臂的网格数为132 109个节点和93 762个单元。
网格划分之后,进行边界条件设置和施加载荷,主要载荷名称及施加位置如表2所示。施加载荷位置根据实际采摘机器的运动特点而定,采取固定约束、旋转约束及执行驱动等多个方式,以符合实际的结构模型承载力为出发点进行条件设置。
3.2 过程分析
经有限元多次反复计算与成功迭代,分别得到自动采摘机主要支撑臂的前4阶模态振型云图(见图7)和驱动电机的前4阶模态振型云图(见图8),由图7可知:采摘支撑臂的动态特性在低阶模态时表现较为明显,呈现出的振型特征为弯曲和扭转。
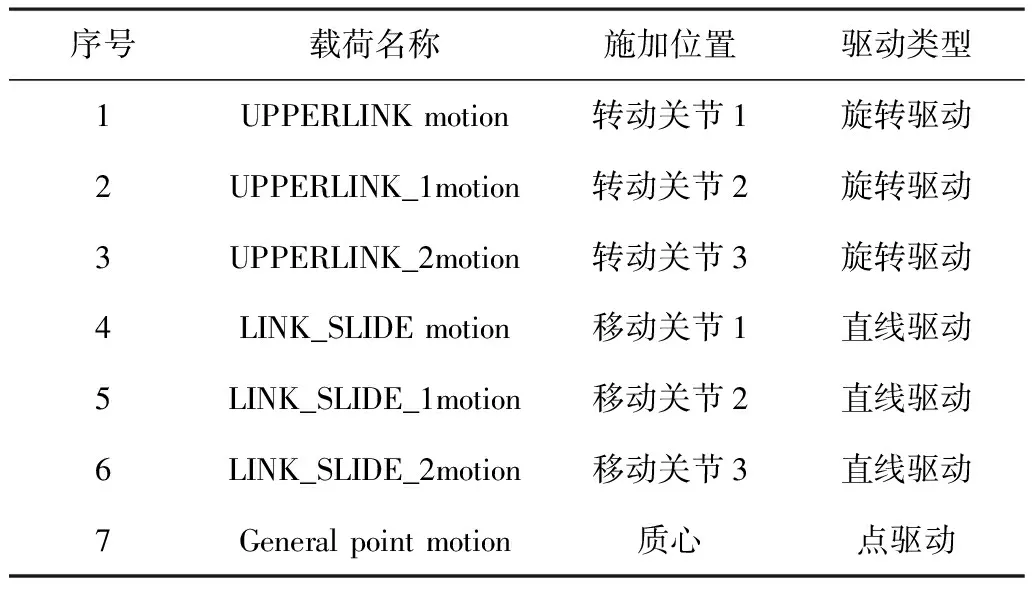
表2 自动采摘机械臂的有限元模型主要载荷施加设置
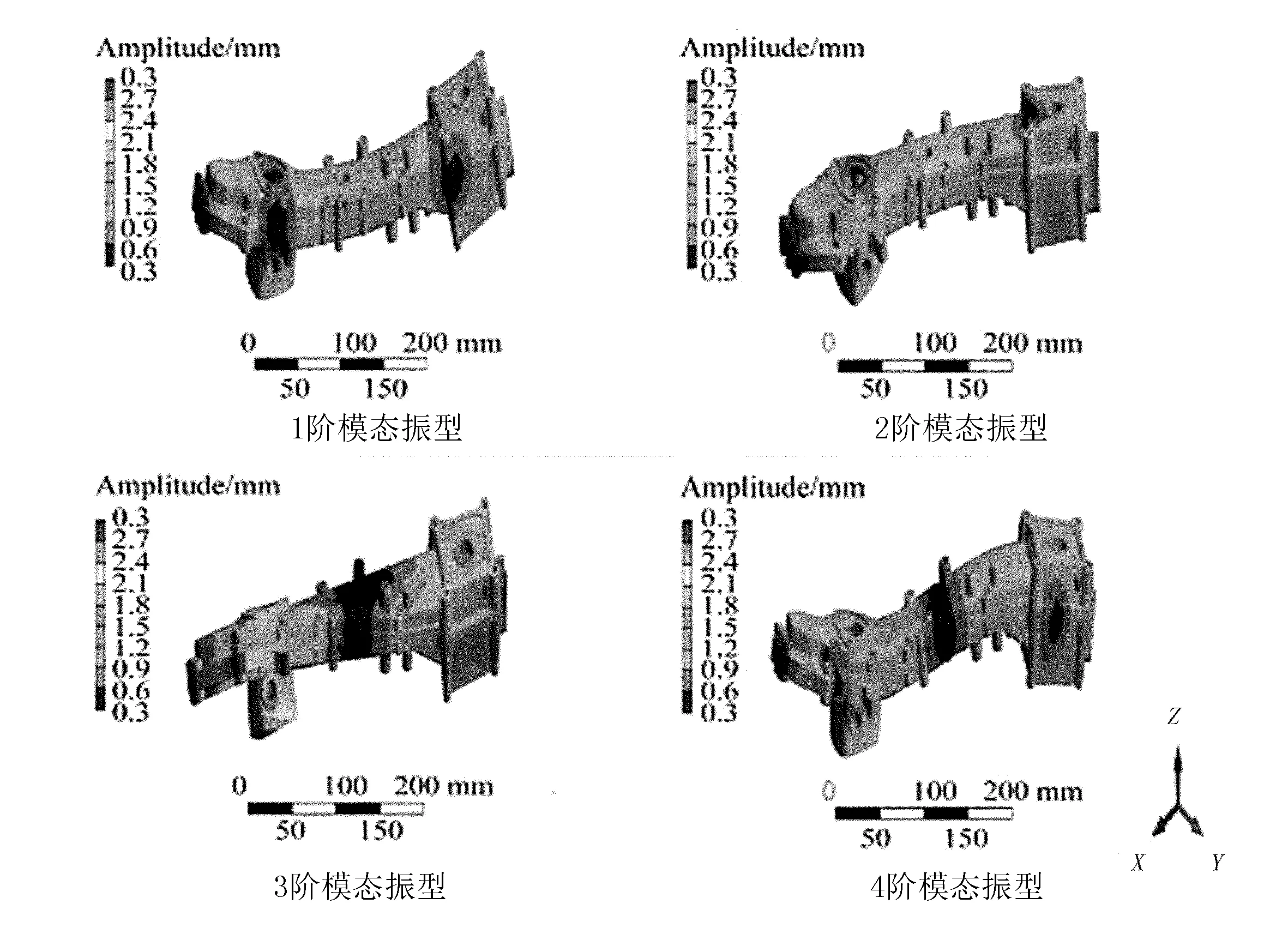
图7 自动采摘机主要支撑臂的前4阶模态振型
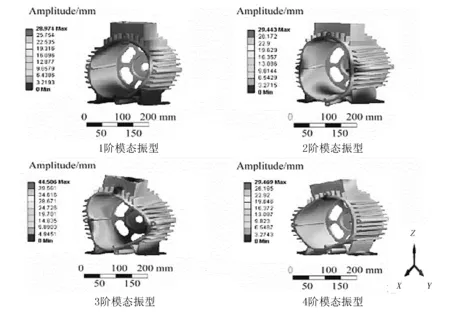
图8 自动采摘机驱动电机的前4阶模态振型
由图8可知:该驱动电机的机座在低阶模态中主要表现为筒体前端面的弯曲和扭转,在3阶、4阶模态中受到的影响较为剧烈。
进一步对试验数据进行统计计算,得到如表3所示的采摘电机结构模型有限元分析中的固有频率对比值。由表3可知:利用有限元法求解得到的结果与理论计算法一致性较高,平均误差控制在4.015%左右,最大误差不超过6.5%,说明有限元试验分析可行且数据可靠。

表3 自动采摘电机结构模型有限元分析固有频率对比
4 结论
1)通过深入理解自动采摘的工作原理及各部件的结构组成和实现功能要求,在有限元控制计算的机理下,利用UG软件建立该自动采摘机器的核心部件三维结构物理模型。
2) 以ANSYS分析软件为平台,通过网格划分、材料属性设置及边界和载荷控制约束,进行采摘结构的有限元分析,得到可视化的采摘作业过程中核心部件的固有频率范围与应力状态分布情况,为准确了解结构的构成与受力、进一步优化改进提供了参考依据。
3) 有限元分析结果与理论计算的误差控制在6.5%以上,满足设计要求,验证了将有限元应用于自动采摘结构模型的可行性,对其他类似农机设计优化有一定的指导意义。
猜你喜欢
力学与实践(2022年5期)2022-10-21 08:10:34
环球时报(2022-07-13)2022-07-13 17:18:39
兰州交通大学学报(2022年2期)2022-04-26 10:19:12
环球时报(2022-03-14)2022-03-14 18:19:44
时代汽车(2019年1期)2019-10-21 10:16:52
特种结构(2019年2期)2019-08-19 10:05:52
电影(2018年8期)2018-09-21 08:00:06
制造技术与机床(2017年8期)2017-11-27 02:09:55
山西建筑(2015年14期)2015-06-05 09:37:07
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
