
分层深松铲前后铲距对土壤扰动行为影响的仿真与试验
2020-10-17 01:16:40王学振朱瑞祥黄玉祥
农机化研究 2020年11期
岳 斌,王学振,白 璐,朱瑞祥,黄玉祥
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
0 引言
作为蓄纳降雨、打破犁底层等所采取的疏松土壤的一种措施,深松作业是保护性耕作的重要环节[1]。分层深松可以在增大土壤临界深度的同时对深层土壤的侧向运动产生较小的影响[2]。分层深松铲的前后铲距对深松铲的耕作阻力和土壤扰动行为产生重要影响。
国内外学者围绕分层深松铲的前后铲距对深松机的功耗和耕作阻力的影响开展了大量研究。Kasisira等通过研究前后铲间距对分层深松机功耗的影响,对前后铲距进行了优化[2]。王微采用正交试验方法分析前后铲距等对分层深松铲的耕作阻力的影响[3]。赵艳忠等研究分层高度差和前后铲距等对分层深松铲牵引阻力的影响[4]。田艳博等设计的一种新型分层深松整地机,缓解了深松铲的堵塞现象,提高了深松铲的碎土效果[5]。现有研究侧重分析分层深松铲的前后铲距对耕作阻力及功耗的影响,缺乏分层深松铲的前后铲距对土壤宏观和微观运动的影响的研究。
因此,本研究以分层深松铲为对象,综合利用离散元法和数字化土槽试验,重点探究了不同前后铲距下土壤扰动行为和耕作阻力的影响,以期为分层深松铲的设计和优化提供一定依据。
1 室内土槽试验
1.1 试验材料
试验在西北农林科技大学机械与电子工程学院室内数字化土槽中开展。试验中所用土壤的土质为塿土[7]。试验用到的深松铲柄为圆弧形铲柄,前铲铲尖采用箭型铲尖,后铲铲尖采用凿型铲尖,如图1所示。耕作层和犁底层的厚度分别约为170mm和130mm,为打破犁底层,分层深松铲后铲入土深度设置为300mm[6]。根据相关研究,设定分层高度为115mm,分层深层铲的前后铲距设置为250、300、350、400、450mm,共5个水平[9-10]。

图1 分层深松铲的结构图Fig.1 Structure diagram of layered deep loose shovel
1.2 试验过程
试验前对选用的大田土壤参数进行了测定。耕作层和犁底层中土壤的含水率、紧实度和平均密度如表1所示。

表1 土壤物理参数的测定Table1 Determination of soil physical parameters
为保证土槽试验的土壤条件接近大田土壤环境,在土槽试验前对大田土壤参数进行测定,并根据表1数据将土槽土壤分层制备[11]。测定制备后土壤耕作层和犁底层的土壤平均密度、含水率和紧实度如表1所示。
土壤制备完成后分别对5个前后铲距下的分层深松铲进行土槽试验。在实际作业过程中,深松设备的前进速度一般不会小于5km/h,因此设置土槽试验中动力牵引设备的速度为3km/h[12]。考虑到土槽车运动过程中有一段加速和减速时间,因而将土槽内前后各3m区域设定为缓冲区,中间14m区域设定为测试区[13]。在试验土槽车行驶过程中,为测量分层深松铲受到的耕作阻力,将传感器安装在左右悬挂装置和上拉杆上,并利用无线设备将耕作阻力信号实时发送至计算机。
耕作比阻(SDF)可以反映深松作业中拖拉机的能耗的状况,是评价深松作业效果的重要指标之一[7],即
(1)
式中DF—耕作阻力(N);
A—深松作业后土壤横截面扰动面积(mm2)。
在深松结束后,采用土壤宏观扰动轮廓测量仪,获取准确的深松后土壤扰动轮廓。沿土槽试验车前进方向,在测试区域内每间隔3m测量一次,绘制过程重复3次,如图2所示。

图2 深松后土壤横截面土壤轮廓的测定Fig.2 Determination of soil profile of soil cross section after deep pine
土壤膨松度和土壤扰动系数可以作为衡量深松土壤扰动效果的评价指标[6],计算公式为
(2)
(3)
式中p—土壤膨松度(%);
Aq、Ah—耕前、耕后地表至理论深松沟底的横断面面积(mm2);
λ—土壤扰动系数(%);
As—耕前地表至实际深松沟底的横断面面积(mm2)。
2 EDEM仿真分析
2.1 深松铲建模
在SoildWorks软件中,将分层深松铲按1∶1大小尺寸建立模型,并保存为.igs格式[15]。
2.2 土壤颗粒及土壤接触模型
选取土壤颗粒间的接触模型为Hertz-Mindlin with Bonding (HMB)模型[16]。该模型中土壤颗粒间具有粘结作用,可以代替传统土壤颗粒模型中的液桥。该粘结键如图3所示,可承受一定的力,土壤颗粒单元采用基本球形。诸多学者的研究表明[13-15],采用8mm及其以上半径的球体作为土壤颗粒模型可以较好地模拟土壤与深松铲间的相互作用,故本试验选取土壤颗粒单元的半径为8mm。

图3 颗粒粘结键Fig.3 Bonds between particles
2.3 土壤模型参数的标定
在离散元软件中,模型参数包括接触参数和材料参数。接触参数主要包括材料间的摩擦因数和恢复系数,土壤间的恢复系数、土壤-65Mn间的恢复系数、土壤间的静摩擦因数及土壤-65Mn间的静摩擦因数,可根据文献获得[13]。材料参数主要包括深松铲和土壤的密度、剪切模量和泊松比等,土壤和深松铲的剪切模量参考文献数据[6,15],土壤的平均密度测量获取。耕作层和犁底层土壤的泊松比[6]为
(4)
式中μ—泊松比;
φ—土壤内摩擦角。
2.4 EDEM耕作模型
为更好地模拟土壤的真实状态,先在离散元仿真软件中建立长×宽×高为1000mm×1200mm×400mm的虚拟土槽,然后根据杨陵大田土壤的情况,将模拟土槽分成三层:耕作层(0~170mm)、犁底层(170~300mm)及心土层(300~400mm)。设定完参数后,采用颗粒工厂动态生成土槽,然后将深松铲3D模型导入软件中。
2.5 仿真分析
为分析分层深松的前后铲距对各层土壤在不同方向上最大位移的影响,在土壤中心位置截面选取代表性颗粒,分别距地表0、85、230mm深度处标记为L1、L2和L3(见图4),利用离散元后处理功能计算出耕作过程中标记颗粒在x、y和z方向的最大位移。以土壤是否具有运动速度为条件,将绘制的土壤颗粒的运动速度临界曲线作为土壤扰动的坑形轮廓,将土壤在地表的堆积轮廓作为土壤扰动的垄形轮廓[18]。
图4 选定颗粒位置Fig.4 Locations of selected particles
3 结果与讨论
3.1 土壤扰动微观过程分析
在仿真环境下选择耕作方向上厚度为400mm的局部土体,前后铲距为350mm时,分析分层深松铲对土壤微观作用过程。图5为耕作层和犁底层土体内部粘结键断裂总数随时间的变化情况。图6为不同时刻耕作方向和侧向的截图。

图5 分层深松铲运动过程中粘结键断裂情况Fig.5 Fracture of bond in the process of layered subsoiler

图6 分层深松铲的运动过程Fig.6 Motion process of stratified subsoiling shovel
由图6(a)可知:在4.2s时刻,分层深松铲的前铲即将进入土体,此时在牵引力的作用下铲尖通过挤压土体进入土层,此时粘结键断裂数开始逐步增加,土壤开始破碎。由图6(b)可知:在4.5s时,前铲的曲柄刃段作用于土体,此时曲柄段的弧形结构使作用区域的土体内部粘结键逐渐断裂,逐步形成深松扰动边界,扰动区域内的土壤在前铲作用下被抬升,达到松土的效果;接着前铲的直铲柄段作用于土体,后铲铲尖开始进入土层,此时随着深松铲的前进,直柄端将前一阶段抬升的土体进行破碎剪切,在深松铲两侧土垄,粘结键断裂数继续增加,达到松土的效果。由图6(c)可知:在5s时刻,前铲曲柄段和直柄段对土壤的抬升、剪切作用,土体内部发生了完全破碎;同时,后铲曲柄段开始对前铲破碎的土体抬升、剪切,形成有“阶梯”状沟槽。由图6(d)可知:在5.3s时刻,前铲完全离开土体,土体会形成沟槽,沟槽两侧的土壤会有一部分回落,但在后铲的二次抬升、剪切下,深松铲两侧的土垄会增高;在5.6s时刻,后铲离开土体,此时形成分层深松后的沟槽,土壤粘结键断裂总数趋于一个稳定值,说明分层深松铲对这一局部区域土体的扰动完成。
3.2 土壤微观运动对比分析
为进一步定量分析前后铲距对不同位置土壤扰动的影响,采用EDEM软件的后处理功能,获取标定土壤颗粒在耕作过程中的侧向(x)、耕作方向(y)和竖直方向(z)上的最大位移,以期获得前后铲距的变化对分层深松铲耕作过程中各层土壤在各方向实际临界运动状态的影响。
3.2.1 前后铲距对土壤侧向(x)运动的影响
由图7可知:当分层深松铲的前后铲距变大时,表层土壤(L1)侧向扰动的范围呈现先增大后减小的趋势,且表层土壤在侧向的最大位移在前后铲距为250mm时最小,为11.30mm,其次为前后铲距300mm时,为15.89mm;在不同前后铲距下,耕作层土壤(L2)的侧向扰动范围均无明显差异;在犁底层中土壤(L3)的侧向扰动范围呈现先增大后减小趋势,且当前后铲距为350mm时,分层深松铲对犁底层土壤的侧向扰动范围最大[10]。
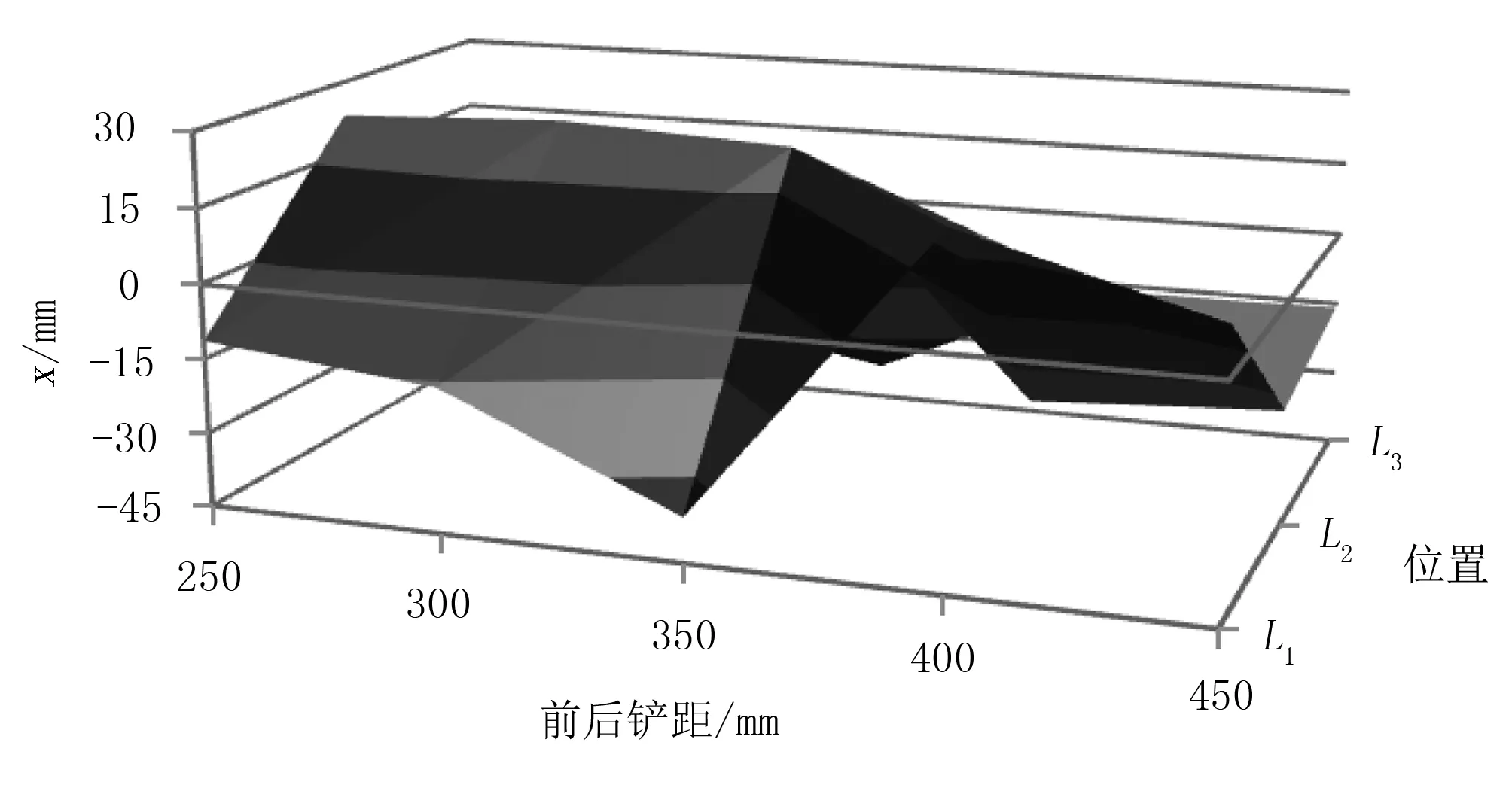
图7 土壤颗粒侧向最大位移Fig.7 Lateral maximum displacement of soil particles
3.2.2 前后铲距对土壤耕作方向(y)运动的影响
由图8可知:随着前后铲距的增大,表层土壤(L1)在耕作方向的最大位移相差较小;耕作层土壤(L2)在耕作方向的最大位移先减小后增大,当前铲铲距为350mm时耕作层土壤在耕作方向位移最小,为210.39mm,其次为前后铲距400mm时,为349.28mm;犁底层土壤(L3)在耕作方向的最大位移表现为先减小后增大,且前后铲距为350mm时犁底层中土壤在耕作方向的最大位移最小,为132.53mm,其次为前后铲距400mm时,为135.11mm。综上可知:当前后铲距为350mm时,各层土壤在耕作方向的最大位移相对较小,根据能量守恒原理,前后铲距为350mm时由拖拉机的动力系统传递给土壤的动能较少,有利于降低拖拉机的功耗[9]。

图8 土壤颗粒耕作方向最大位移Fig.8 Maximum displacement of soil particles in the direction of cultivation
3.2.3 前后铲距对土壤竖直方向(z)运动的影响
由图9可知:随着前铲铲距的增大,其表层土壤(L1)在竖直方向的最大位移减小后增大,且当前后铲距为400mm时表层土壤在竖直方向的最大位移最小,为137.69mm;耕作层土壤(L2)在竖直方向的最大位移呈现先增大后减小、再增大的趋势,且当前铲铲距为400mm时耕作层土壤在耕作方向的最大位移最小,为132.81mm;犁底层土壤(L3)在耕作方向的最大位移先增大后减小,且前后铲距为350mm时犁底层中土壤在耕作方向的最大位移最大,为170.32mm。综上可知:当前后铲距为350mm时,犁底层土壤在竖直方向相对最大位移最大,表层土壤和耕作层土壤在竖直方向的最大位移相对较小,有利于缓解深松铲作业时的土壤堆积程度[21]。

图9 土壤颗粒竖直方向最大位移Fig.9 Maximum displacement of the soil particles in the vertical direction
3.3 土壤扰动效果分析
3.3.1 土壤膨松度和扰动系数
深松作业后,由式(2)、式(3)计算可得土壤膨松度及土壤扰动系数,试验结果如表3所示。

表3 土壤膨松度和土壤扰动系数仿真值与试验结果Table 3 Simulated and experimental soil looseness and disturbance coefficient %
由表3可知:前后铲距对土壤膨松度具有较为显著的影响,在前后铲距为250mm土壤膨松度相对较小(<10%),说明前后铲距为250mm时,后铲对土壤扰动受到前铲的抑制作用,深松作业质量较差。当前后铲距为350mm时,土壤的扰动系数相对较大。此外,5个不同前后铲距作业后土壤膨松度和扰动系数的试验值、仿真值的平均误差分别为12.41%和13.61%,表明建立的仿真模型具有较好的准确性。
3.3.2 分层深松铲的前后铲距对耕作阻力的影响
由图10可知:不同前后铲距下耕作阻力在3~5kN之间变化,当前后铲距为250mm时耕作阻力最大;不同前后铲距下耕作阻力的仿真值与试验值的平均误差为13.84%。

图10 分层深松铲的前后铲距对耕作阻力的影响Fig.10 Effect of spacing between front and rear subsoilers on draft force
3.3.3 分层深松铲的前后铲距对耕作比阻的影响
深松作业后,由式(1)计算出深松耕作比阻的仿真值和试验值及其相对误差,如图11所示。

图11 前后铲距对深松耕作比阻的影响Fig.11 Effect of front and rear cutting distance on specific resistance of subsoiler
由图11可知:前后铲距增加对分层深松铲的耕作比阻产生重要影响,且当前后铲距为350mm时,深松铲的耕作比阻相对较小;5个前后铲距下分层深松铲耕作比阻的仿真值与试验值的平均误差为3.34%。
4 结论
1)分层深松铲不同前后铲距时不同层土壤颗粒的运动位移具有一定差异,进而使土壤扰动效果发生改变。试验结果表明:分层深松铲的前后铲距通过影响表层、耕作层和犁底层土壤在耕作方向、侧向和竖直方向的位移,使分层深松铲铲前堆积程度、侧向扰动范围、不同土层间的混合程度等产生差异。
2)离散元法可以较准确地模拟分层深松过程。前后铲距对土壤膨松度和土壤扰动系数均具有显著影响,当前后铲距为350mm时,土壤蓬松度和扰动系数相对较大;不同前后铲距下深松作业后土壤膨松度和扰动系数的试验和仿真结果的平均误差分别为12.41%和13.61%。
3)分层深松铲的前后铲距对耕作阻力和耕作比阻具有重要影响。不同前后铲距下耕作阻力在3~5kN之间变化,当前后铲距为250mm时耕作阻力最大;当前后铲距为350mm时,分层深松铲的耕作比阻相对较小。5个不同前后铲距下耕作阻力和比阻的试验和仿真值的平均误差分别为13.84%和3.34%。
猜你喜欢
湖北畜牧兽医(2023年6期)2023-12-24 01:56:01
军民两用技术与产品(2022年2期)2022-06-01 06:29:44
中国房地产业(2019年9期)2019-02-01 05:21:08
自然资源情报(2018年2期)2018-12-28 00:49:54
水土保持研究(2016年4期)2016-10-21 02:28:59
新农业(2016年15期)2016-08-16 03:40:48
土壤与作物(2015年3期)2015-12-08 00:46:58
作物研究(2014年6期)2014-03-01 03:39:12
小说林(2014年5期)2014-02-28 19:51:47
杂文选刊(2013年7期)2013-02-11 10:41:11
