
嵌入式拖拉机视频监控系统设计—基于DSP和视频压缩编码
2020-10-17 01:03秦晓明
农机化研究 2020年6期
秦晓明
(焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454000)
0 引言
拖拉机远程监控系统的设计对于提高其调度分配效率和作业质量具有重要的意义。受到作业环境的影响,拖拉机监控系统采用传统意义上的摄像机和PC机相连接组成的监控系统不太可行,因为这种方案不仅成本高,而且系统的稳定性和安全性也比较低,系统的整体效率也不高。嵌入式DSP处理器体积小、功能多、编程方便,可以将视频采集、视频编码处理和网络传输等功能集成于一体,并且利用计算机可以对多个地点进行监控,如果将其使用在拖拉机远程系统的设计上,对于提高监控系统的效率和质量会发挥重要的作用。
1 监控视频压缩编码以及传输技术
拖拉机是农业生产过程中最常用的农机工具之一,常用于农业生产资料的运输、播种机和收割机的牵引设备。拖拉机远程监控不仅可以提高拖拉机的调度分配效率,而且对于作业质量的监测也具有非常重要的意义。一个完整的拖拉机监控视频系统不仅包括视频编解码器,还应该包括前端数据采集、图像预处理、图像传输、图像后处理及播放显示等功能部分,基本框架如图1所示。
远程监控视频是人类获取远程信息的重要形式,视频包含的信息量大,可以直观生动地对远程的环境发生的情景进行展现,根据人视觉的特点,视频信号可以以时间轴为依据进行离散化处理,由此产生了一种新概念叫做帧率。根据图像的大小和帧率可以得到传输信号需要的带宽,如果图像采用的是4:2:0格式,则可以计算得到图像的分辨率为720×576,帧率为30f/s,每个YUV分量用8bit表示,则比特率为
bit_rate=12×width×height·flame_rate
=142Mbit/s
(1)
但是,这个比特率一般是无法实现的,为了保证视频的正常传输,需要对视频进行压缩编码后再进行传输。从1991年的MPEG-1视频编码技术诞生以来,视频编码技术得到了长足的发展,编码效率也不断提高。随着无线通信技术的发展,高吞吐量和高可靠性的无线网络技术被逐步开始应用到网络通信中,特别是DFDM正交频分多路复用技术,可以实现较高的视频传输速率。
2 嵌入式拖拉机视频监控系统设计
拖拉机远程监控系统主要是由5部分组成,包括视频显示终端、视频采集终端、视频信号压缩处理模块、视频信号传输模块和控制模块,其总体框架结构如图2所示。
图2中,视频采集模块主要是对拖拉机作业过程的视频进行采集,然后对采集的视频信号通过采样、滤波、A/D转换成后变成数字信号,对数字信号进行格式变换后,一方面视频可以被压缩,另一方面图像编码也可以成为兼容格式,其流程如图3所示。

图3 视频采集模块流程
视频信号采集完成后,为了保证视频信号的顺利传输,需要对视频进行压缩处理。在压缩过程中,首先要保证视频符合指标,还要保证解码后图像的质量,通过对代码进行优化,保证视频的正常传输,如图4所示。

图4 视频信号处理模块流程
拖拉机监控视频信号处理完成后,需要对信号进行实时传输。视频数据传输的通道有两种形式可以选择,包括TCP传输和UDP多播传输。其中,UDP多播传输可以将1个视频数据发送给多个接收成员,TCP传输主要是单一的任务传输。在设计时可以根据需求选择:如果监控终端有多个接收者可以采用UDP多播形式传送实时数据;如果监控终端只有1个接收者,则采用TCP传输形式。其原理如图5所示。
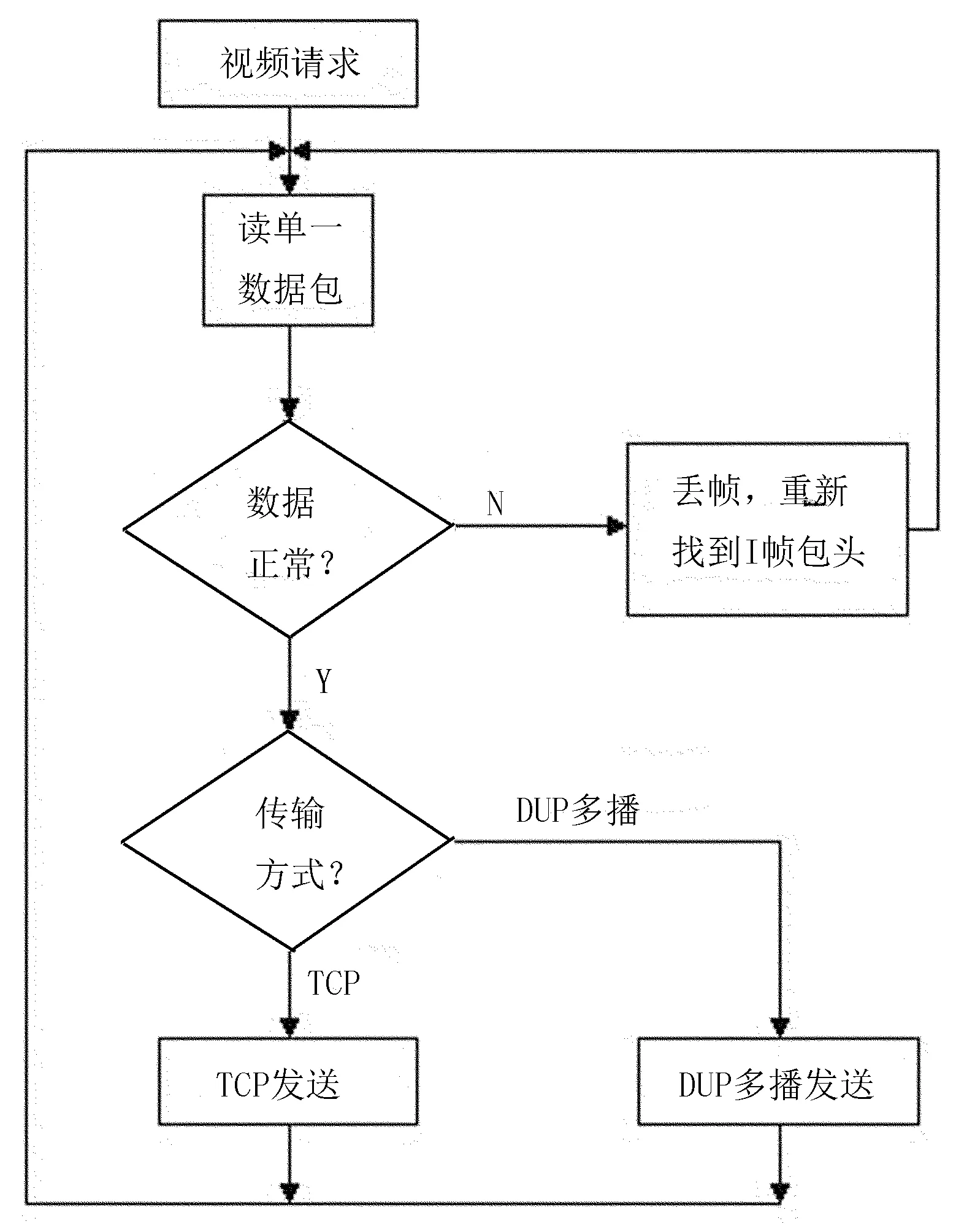
图5 监控数据实时发送处理流程
拖拉机的远程监控视频需要通过网络传送到监控终端,传输过程可以采用TCP/IP协议。为了提高视频的实时传输效率,对监控视频数据进行打包,并根据相关协议对视频进行压缩,如图6所示。
控制模块主要是负责视频显示终端、视频采集终端、视频信号压缩处理模块、视频信号传输模块的系统控制。通过发送指令和接受指令数据,必要时通过对数据进行处理来实现各模块的协调,最终实现远程监控。

图6 网络传输模块设计
3 拖拉机监控系统测试
拖拉机是农业生产中非常重要的牵拉工具,随着农业自动化技术的发展,无人驾驶拖拉机也被应用到农业生产过程中。
图7为国外的一款无人驾驶拖拉机牵引的播种设备在进行播种作业。其作业过程中可以利用实时监控技术对作业情况及运行轨迹进行实时监测,视频采集模块采用TVP5150PBS,视频模块对视频解码转换性能较好;DSP选用DM642,该型号的DSP可以实现与TVP5150的视频数据流进行无缝连接,其连接关系如图8所示。

图7 无人驾驶拖拉机牵引播种作业场景
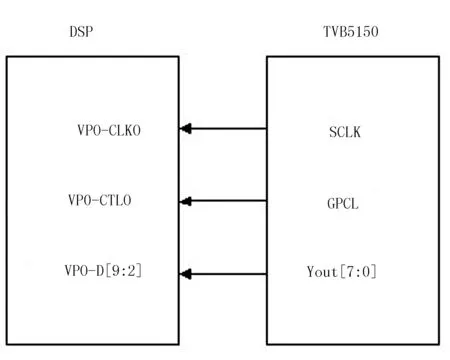
图8 视频采集和DSP模块接口
为了验证方案的可行性,对压缩编码重建的视频信号进行测试,来检验远程监控系统的稳定性和可靠性。失真度是检验信号传输的一个重要指标,其可以用多种方法进行定义。常用的有3种,包括绝对误差总和(SAD)、绝对误差均值(MAD)和均方误差(MSE)。通过对压缩编码重建的信号和原始信号进行比较,可以得到失真度。最常用的MAD公式为
(2)

图像或者视频对象的失真度可以取各相应宏块失真度的平均值,在拖拉机采集的监控视频中要考虑前景图像。因此,可以定义帧的失真度为
(3)
其中,αj为视频对象的权值;N为帧内视频对象的数目。
对于视频信号传输质量的检验,还可以通过峰值信噪比,宏块峰值信噪比定义为
(4)
与失真度一样,帧的视频对象的PSNR可以取各相应宏块PSNR的均值,也可以取加权平均值。本次主要是通过失真度对监控视频信号的传输质量进行检测,得到的测试结果如表1所示。

表1 失真度测试结果

续表1
在不同距离条件下,对拖拉机远程监测系统视频信号传输的失真度进行了测试,结果表明:在1 000~3 500m传输范围内,失真度不超过0.6%,视频传输信号的失真度较低,可以满足拖拉机远程监控系统的设计需求。
4 结论
为了提高拖拉机远程监控系统的监测效率和质量,将DSP嵌入式系统引入到了拖拉机监控系统的设计上,利用DSP芯片和简单的外围电路实现了拖拉机监控视频的采集、处理、传输等功能。为了验证方案的可行性,以失真度为测试对象,对拖拉机远程系统的视频编码和传输的可靠性进行了检验。测试结果表明:在不同距离的视频压缩编码信号传输过程中,失真度都不高于0.6%,信号传输的质量较好。
