
遥控微耕机设计与试验
2020-10-17 01:03药林桃曹晓林董力洪陈立才曾书良邹先贵
农机化研究 2020年6期
药林桃,曹晓林,董力洪,陈立才,曾书良,邹先贵
(1.江西省农业科学院 农业工程研究所,南昌 330200;2.江西省旺农农机制造有限公司,江西 抚州 344300;3.江铃汽车股份有限公司,南昌 330030)
0 引言
南方双季稻区丘陵多、地块小、高差大[1],微耕机具有体积小、质量轻、结构简单和操纵使用方便等优点,适宜在丘陵山地小面积田块作业,是该地区农民耕作的最佳选择,有着广泛的应用前景[2]。微耕机操作要求人跟机具共同行走,操作人员劳动强度大,作业效率不高,微耕机耕作过程中在土壤反力的作用下会产生振动,长时间操作会使操作人员感到不适[3-5]。
农机智能化特别是无人驾驶技术在现代农业技术上的研究越来越深入,逐渐成为农业工程技术智能化研究的重要组成部分[6-7],包括遥控和图像识别田间作业机器的直线和转向行驶、全自动转向、田间地头原地掉头、作业部件的启动和终止。洛阳市玛斯特拖拉机有限责任公司开发了一款遥控微型履带耕作机[8]。何金伊、杨福增等设计一种以手持遥控方式操作的山地微耕机[9],操作者可脱离作业机械,使操作更为便捷,不但改善了危险环境作业时人机不分离的工作情况,而且降低了劳动强度,但两款机型都适用于山地果园作业。
江西省农业科学院农业工程研究所与江西省旺农农机制造有限公司研发了一款适宜水田耕作的遥控微耕机,不需要人直接操作机具,远距离遥控便可进行微耕机的行走、转向等操作,实现智能作业,提高了操作安全性,降低了劳动强度。
1 结构组成及工作原理
除了微耕机动力机构、传动机构、操作机构之外,遥控微耕机对微耕机底盘进行了改进,加装了控制装置,如图1所示。工作时,可遥控实现微耕机转弯、前进、后退、停止等作业,并可同时进行人工和遥控两种操作,省时省力,操作简单,有效提高了工作效率。

1.前支撑轮 2.柴油机电源 3.电源 4.控制装置 5.手动自动转换开关 6.变速箱皮带轮 7.后支撑杆 8.变速箱 9.水田轮 10.耕作部件
微耕机是通过变速箱主离合器的闭、合控制机具的行走、停止;转向主要靠左右两个扶手的离合器,在左右任何一轮的离合分离时,其对应的车轮静止不动或速度下降,另一轮速度不变,从而达到转向的目的[10]。遥控微耕机根据微耕机行走和转向的原理,采用STC608AD单片机为核心控制器,利用气动阀门工作原理,对微耕机变速箱主离合器和转向离合器进行远距离遥控,从而实现微耕机行走、停止和转向,最远遥控距离可达100m。控制装置包括遥控器、遥控接收器、单片机、继电器、气缸、气动电磁阀、空气压缩机及储气罐等。储气罐上装有压力表、排气阀、空气过滤器,空气压缩机、储气罐、气动电磁阀、气缸通过气管相连,气缸推杆与离合器相连,控制主离合器和转向离合器的闭合,如图2所示。

1.电池 2.气压表 3.控制器 4.转向气缸 5.信号接收器 6. 储气罐 7.皮带轮 8.空气压缩机 9.继电器 10.制动气缸
遥控微耕机工作流程如图3所示。工作时,开启电源开关,启动柴油机,机具运转,空气压缩机对储气罐充气;选择遥控器上的功能键,信号接收器接到遥控指令并传递给控制器,单片机对信号进行解码,并控制相应的气动电磁阀;同时,储气罐经过相对应的气动电磁阀供气压给相对应的气缸,气缸推杆在气压的作用下拉动离合器上的连接杆,从而实现离合器的分离与闭合,如图3所示。

图3 遥控微耕机工作流程图
遥控器发出左转指令后,微耕机接收信号,左转气缸工作,左转离合器分离,左轮停止,右轮继续行走,机具左转;遥控器发出右转指令,右转气缸工作,右转离合器分离,右轮停止,左轮继续行走,机具右转;遥控器发出停止指令后,制动气缸工作,变速箱主离合器分离,机具停止。
2 遥控微耕机设计
2.1 传动机构设计
遥控微耕机发动机的动力由皮带连接传输到变速箱总成的主离合器,通过主离合器输入变速箱,变速箱将动力通过减速齿轮将动力传输给水田轮,形成前进动力;通过减速齿轮和链条将动力传输给刀辊,进行耕整地作业。发动机的另一部分动力通过皮带传输给空气压缩机,为气缸提供工作动力,各部件参数如表1所示。

表1 动力传动机构参数
2.2 气动执行机构设计
气动执行机构原理如图4所示。

1.电磁阀 2.继电器 3.离合器 4.气缸 5.储气罐
遥控微耕机的气动执行结构中,气缸通过电磁阀与储气罐连接,气缸推杆与离合器连接;遥控信号通过控制器将转换后的信号传递给相应的继电器,控制电磁阀滑阀的气路换向,操纵气缸的气缸推杆的伸缩,来实现离合器的分离和结合。该机构结构简单合理,工作稳定性高,故障率低,维修方便,成本低。
遥控微耕机主要控制制动、左转和右转3种操作,所以选用拉杆式标准气缸对离合器进行控制,结构简单,耗气量小。气缸设计一般采用式(1)~式(3)进行计算[11-13]。
气缸的理论输出力为
(1)
拉杆式气缸理论推力为
(2)
气缸直径为
(3)
式中F—气缸实际输出力(N);
F1—气缸理论输出力(N);
β—气缸负载率;
D—气缸缸径(m);
p—气缸工作压力(Pa)。
微耕机前进速度比较慢,气缸进行低速运动,负载率β取值为0.6;空气压缩机提供的气压p通常在0.8~1.0MPa之间,其中95%的执行元件的最大工作压力约为0.7MPa;主变速箱离合器最大制动力800N,转向离合器最大制动力为280N。按上述公式计算后,选定制动气缸缸径为50mm,转向气缸缸径为30mm;根据变速箱主离合器行程,确定制动气缸行程s=50mm,转向离合器行程s=32mm,制动气缸型号为SC50×50,转向气缸型号为SC32×30。
2.3 控制器的设计
遥控微耕机遥控器发射部分采用315MHz无线数据发射模块,采用声表谐振器SAW稳频,器频率稳定度极高,当环境温度在-25~+85℃之间变化时,频飘仅为3ppm/℃。控制器主要由STC608AD单片机[14-16]、继电器及其外围电路组成,用单片机输出端通过继电器与电磁阀相连,控制气缸运动。遥控器发出的信号经接收器接收转化成TTL信号后送给单片机,单片机采集到数据,进入解码程序,获得对后置电路所需的控制信息。这些控制信息可直接输出,当输出高电平时,使得电路中的三极管导通,继电器线圈导通形成磁场,吸住弹片,常闭断开,常开闭合,连通电磁阀开始工作。STC608AD单片机管脚图如图5所示。

图5 STC608AD单片机管脚图
2.4 微耕机质心坐标
微耕机质心位置是影响其操纵稳定性、行驶平顺性、安全性的重要参数之一。本文采用力矩平衡法来测定智能微耕机的质心坐标,如图6所示。力矩平衡测定法是目前普遍采用的种方法,比较简单,不需要什么专用设备,是一种近似的测量方法[17-20]。
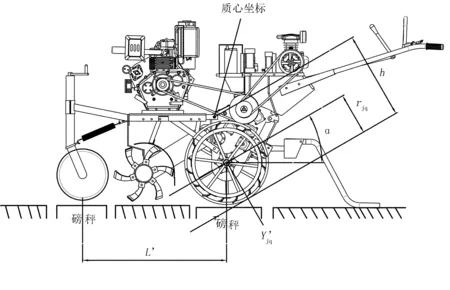
图6 智能微耕机质心坐标测定示意图
微耕机质心坐标用a、e、h表示。其中,a为质心的纵向坐标,e为质心的横向坐标,h为质心的高度坐标。测定时,将前智能微耕机的支撑轮和两个驱动水田轮接地三点支承,并处于同一平面呈等腰三角形,测得此时微耕机倾斜角度、驱动轮支反力和静力半径等参数。
质心纵向坐标a,即质心距驱动轴线的水平距离。质心在驱动轴轴线之前,规定a为正值,反之为负值。计算公式为
(4)
式中a—微耕机质心纵向坐标(mm);
m—微耕机使用质量(kg);
g—重力加速度(m/s2);
Yh—微耕机旋耕状态时阻力装置的地面支承反力(N);
Lz—微耕机阻力装置的地面支承点与驱动轴轴线的水平距离(mm)。
质心水平横向坐标e,即质心距驱动轮纵向中心平面的距离。顺微耕机前进方向看,质心在该平面前的左侧,规定为正值,反之为负值。计算公式为
(5)
式中e—微耕机质心水平横向坐标(mm);
L1—驱动轴两对称支承点的水平距离(mm);
Yz—驱动轴左支承点支承反力(N);
Yy——驱动轴右支承点支承反力(N)。
质心高度坐标h,即质心至刚性支承平面的垂直距离,用式(6)计算,即
(6)
式中rjq—微耕机驱动轮静力半径(mm);
α—微耕机倾斜角(°),要求测量误差不大于5′;
a—微耕机质心纵向坐标(mm),质心在微耕机驱动轮轴前方时,a为正值,在驱动轮轴后方时为负值;

ms—微耕机使用质量(kg);
g—重力加速度(m/s2);
L′—微耕机倾斜α角度后支点(或尾轮中心)到驱动轮轴垂直于面之水平距离(mm),支点在微耕机驱动轮轴前方时L为正值,在驱动轮轴后方时L为负值。
将测定数据分别代入式(4)~式(6)中,计算得到微耕机质心纵向坐标a=113mm,质心水平横向坐标e=9mm,质心高度坐标h=347mm。
3 试验与结论
3.1 试验
遥控微耕机操作试验在江西省农科院水稻所试验田进行,试验田规格为30m×20m,如图7所示。试验时,手持遥控器分别对微耕机发出直行作业、转弯、田间原地180°转向等指令,微耕机均能完成相应操作;信号传输和气动执行系统响应及时,动作切换顺畅且无干扰现象,机具运行平衡,耕作性能满足水田耕作要求,如表2所示。

图7 遥控微耕机耕作田间试验

表2 遥控微耕机性能
3.2 结论
使用无线遥控器和小型气动执行系统的智能微耕机能大大减轻操作人员的耕作劳动强度,提高了作业效率。田间试验表明:耕作效果满足水田耕作的要求,项目组将继续研发基于无线遥控和自动控制融合的全自动无人驾驶智能微耕机。
