基于机动动作库的UCAV逃逸机动决策
2020-10-16 03:43:06谭目来朱文强刘远飞
无人系统技术 2020年4期
谭目来,朱文强,刘远飞
(空军工程大学航空工程学院,西安710038)
1 引 言
当前在实时空战仿真中,自主机动决策问题是模拟无人机对抗过程的核心内容。在自主决策算法设计中,常用的方法有矩阵对策法、微分对策法、专家系统法、神经网络法和影响图法[1]。无论应用何种方法,传统的做法均是在每一个仿真步长内对无人机当前所处态势进行判断,选择下一步合适的动作,不断改变无人机的姿态,目的是为了使无人机每一步的运动都达到相对最优的飞行轨迹[2]。当前基于机动动作库的无人战斗机(Unmanned Combat Aerial Vehicle,UCAV)航迹仿真与可视化[3]已有不少相关文献,但普遍只给出典型战术动作具有的几何形态、战术意义和适用条件,而没有对动作进行定量的描述。文献[4]提出了含描述参数的机动动作库,提出要以定量参数对机动动作进行刻画,以体现角度、速度、曲率等空间特性和起止、持续等时间特性,但每种动作的描述参数很少。针对这种情况,本文对基本机动动作库进行拓展,提出了六种机动动作并给出机动动作的控制律[5]进而进行仿真。
关于进一步采用机动动作库进行空战决策的文章很少,大部分只停留在机动动作库的航迹仿真与可视化层面。在王锐平等[6]的文章中,提出以基于机动动作库的空战专家系统快速选择机动动作,从而完成自主空战决策,但是建立的专家系统具体如何选择机动动作方面语焉不详,且未建立具体的数学模型,实际中可用性不强。本文针对这一问题,采用滚动时域优化策略[7],以建立的机动动作库作为预测模型,预测机动试探后的态势信息,以态势最优选择机动动作,从而完成机动决策,提出具体的优化框架,可操作性比较强。
尽管在超视距空战[8]中以导弹作为武器,先发现先摧毁,通过机动摆脱几率较低,主要采用干扰弹[7]进行干扰,采用机动意义不大,但在近距格斗中,航炮还是一种重要的作战手段,UCAV采取机动仍具有重要意义,因此本文采用航炮作为武器,并对航炮弹丸弹道进行解算。
而对于滚动时域优化终止条件问题,付昭旺等[9]将态势条件满足作为终止条件不太符合实际情况。本文以航炮作为机载武器,采用航炮示迹线与UCAV 质心距离小于3 m 作为优化终止条件,比较符合实际情况。
本文最终采取双机在攻击机以追踪法[10]进行追击的典型态势下空战进行仿真,得到双机的三维运动图像以及态势函数变化曲线。
2 无人机运动学与动力学模型
本文从无人机三自由度运动模型入手:(1)将UCAV 视为质点,不考虑其形状;(2)忽略侧滑角;(3)忽略地球自转和曲率的影响,视地面坐标系为惯性坐标系;(4)忽略气流与阵风的影响;(5)忽略高度与经纬度对重力加速度的影响。基于以上假设条件,建立无人机的运动学以及动力学模型[11]

式中x,y,z,v,γ,θ,ψ分别表示UCAV 在惯性坐标系中x,y,z轴的坐标、速度、航迹倾角、滚转角、偏航角和迎角,nx,nz分别表示切向过载和法向过载。选取X=[x,y,z,v,ψ,θ]作为状态量,U=[nx,nz,γ]作为控制量。
基于过载和滚转角的模型以及基于迎角、推力和滚转角的UCAV 三自由度模型都是常用模型。基于过载和滚转角的模型是一种间接控制模型,通过间接控制过载量来实现对UCAV 的机动控制,模型相对简单容易实现,但是基于迎角、推力和滚转角的模型更加贴近真实,能够更加直观看出UCAV是如何进行控制的。本文采取的是基于过载和滚转角的模型,对两种三自由度模型的控制量进行转化:
根据油门位置μ、迎角α和切向过载nx、法向过载nz关系式:
以及阻力X、升力Y与速度v和迎角α的关系式,联立方程组可以求得油门位置μ、迎角α以及阻力X、升力Y。
3 机动动作与仿真
机动动作可分为典型机动动作和基本机动动作,通过对三个控制量切向过载nx、法向过载nz和滚转角γ的控制,即可生成相应的机动动作。在机动动作库建立后,根据态势信息由系统规划飞机机动战术,即可从机动动作库中选取合适的机动动作,按照机动动作库选取相应的控制参数,最后生成相应的机动轨迹。
3.1 典型机动动作
典型机动动作[12]是空战中常用的动作集合,这种战术动作库早期设计的主要动作有16 种:直线飞行、定常盘旋、将机头转向目标、下滑增速、俯冲、急拉起、半斤斗、半滚倒转、战斗转弯、跟踪瞄准、急规避转弯、急盘降、蛇形机动、筒滚、高速YO-YO、低速YO-YO。
以上动作库经过多年研究和发展后得到了扩充,从而设计和建立了现今较为流行的拥有25 种动作的战术动作库,包含的动作有:直线飞行、定常盘旋、前置跟踪、俯冲增速、斜拉起、急拉起、纯跟踪、半斤斗、跃升半滚、高过载上滚、高过载下滚、规避转弯、急规避、增速转弯、蛇形机动、筒滚、急盘降、大坡度外转、回转、急上升转弯、下降急转、下滑倒转、半滚倒转、高速YO-YO、低速YO-YO。
由于相应机动动作的控制算法较为复杂,且每一种动作的控制量不具有普遍性,故在此不讨论典型机动动作的控制参数。
3.2 基本操纵动作库
这个动作库是由美国的研究人员根据空战中最常用最简单的机动方式提出来的,主要包括7 种动作:最大加速、最大减速、最大过载爬升、最大过载俯冲、最大过载左转、最大过载右转、稳定飞行(一种各控制量不变的情况)。由于现实中飞机存在诸多限制,因此设置了最大过载,最大滚转角变化率等,更加贴近实际情况。
(1)最大加速控制参数为:
(2)最大减速
控制参数为:

(3)最大过载爬升
控制参数为:

仿真结果如图1所示。
(4)最大过载俯冲
控制参数为:


图1 最大过载爬升仿真图Fig.1 Simulation diagram of maximum overload climb
仿真结果如图2所示。
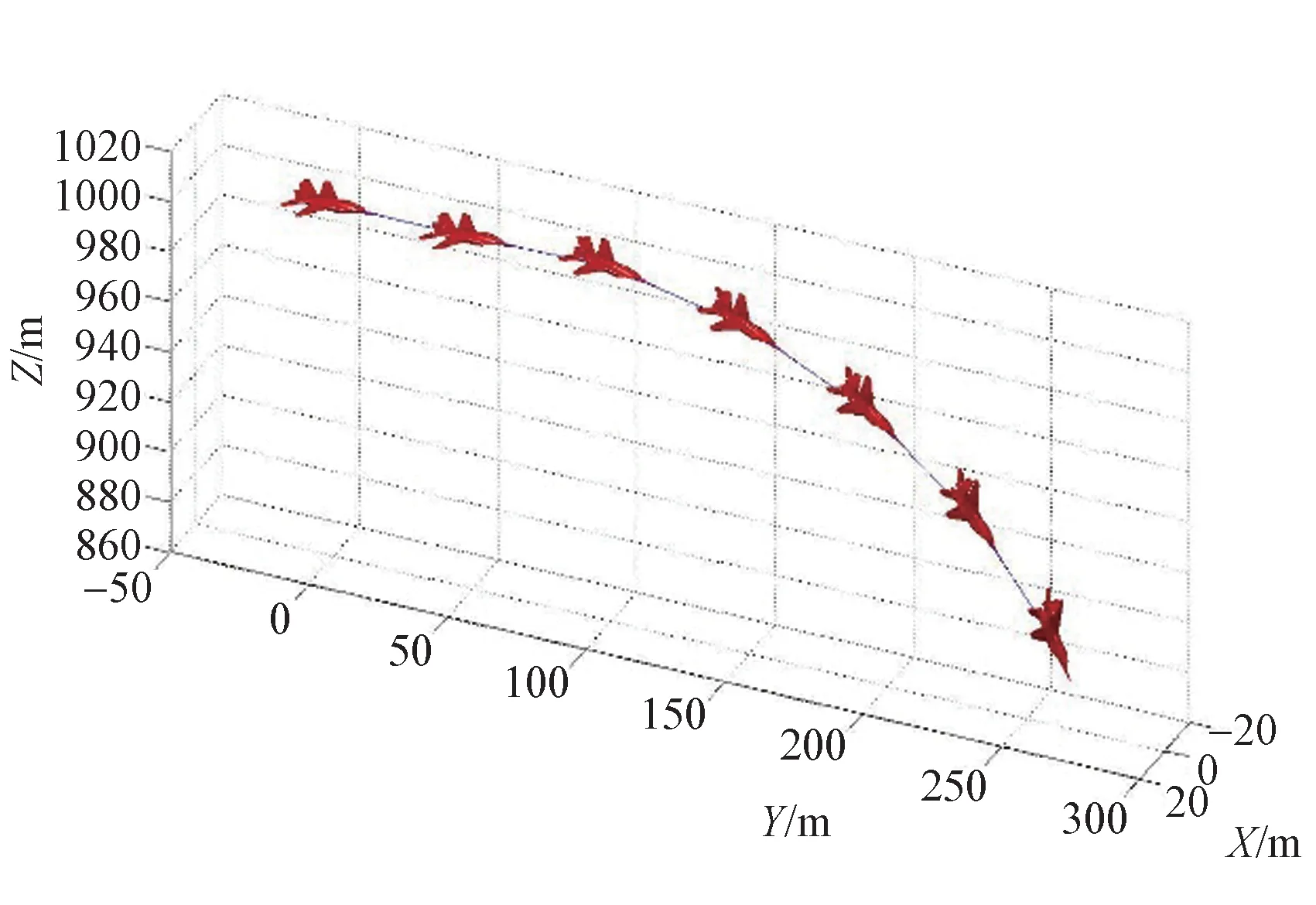
图2 最大过载俯冲仿真图Fig.2 Simulation diagram of maximum overload dive
(5)最大过载右转
在典型条件下进行最大过载右转时,航迹倾斜角控制为0,只有航迹偏转角和滚转角变化,由于为最大过载右转,因此滚转角变化率需达到最大值,L(γ)max为滚转角变化率最大值。
仿真结果如图3所示。
(6)最大过载左转
控制参数为:

仿真结果如图4所示。
(7)保持稳定飞行
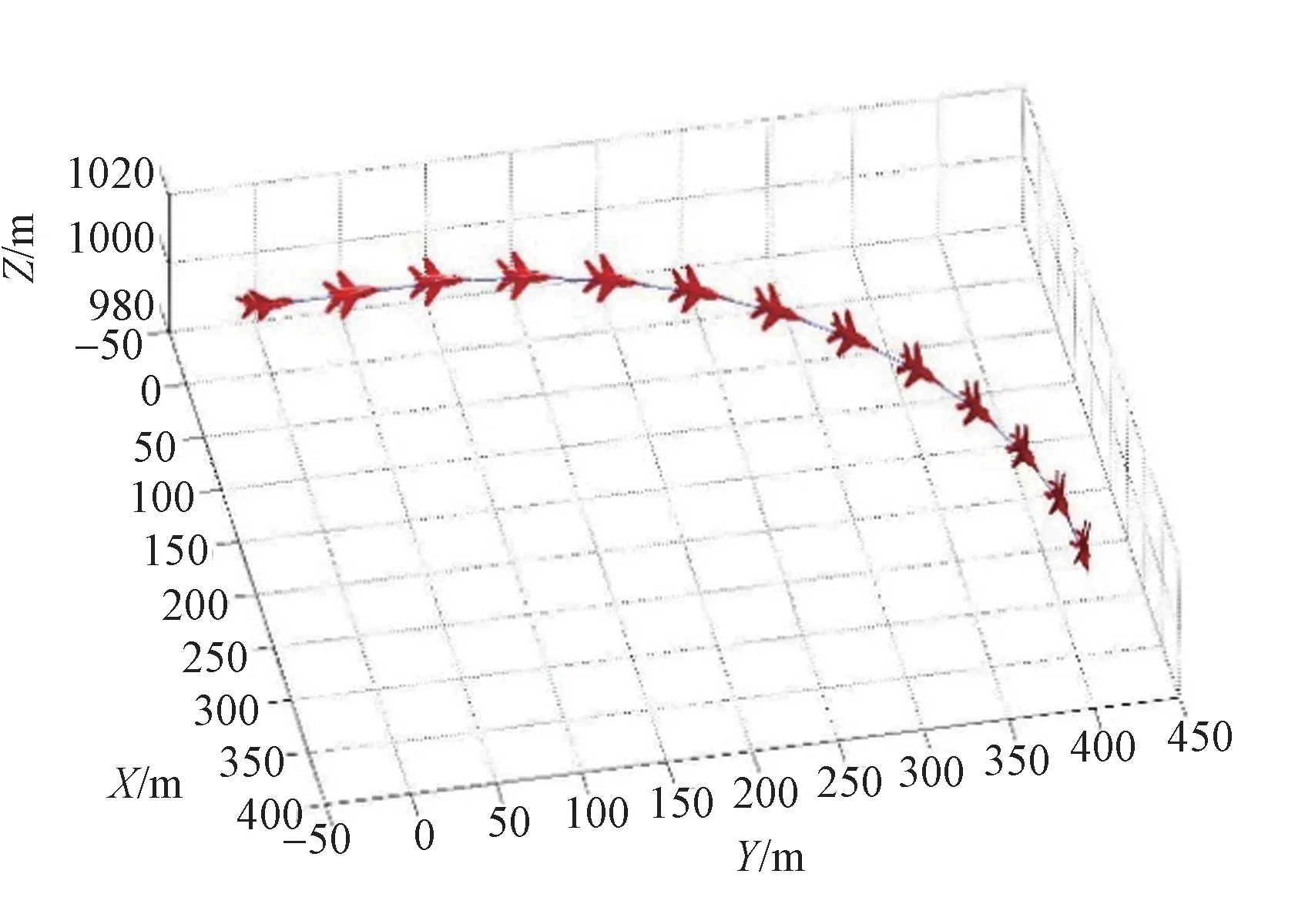
图3 最大过载右转仿真图Fig.3 Simulation diagram of maximum overload right turn

图4 最大过载左转仿真图Fig.4 Simulation diagram of maximum overload left turn
3.3 基本操纵动作库拓展
在这七种基本操纵动作的基础上,本文另外提出了五种机动动作:
(1)半滚倒转
飞机初始时刻为平飞状态,之后以纵轴为中心滚转180°,然后执行向下的半斤斗动作,在铅锤面内以横轴为中心使俯仰角的变化为180°,最终以平飞结束动作。n2取过载允许范围内的值,L(γ)为滚转角变化率允许范围内的值。全程需控制。
控制参数为:
当完成滚转180°后即γ≥π

当完成半斤斗动作后即θ≤-π

仿真结果如图5所示。
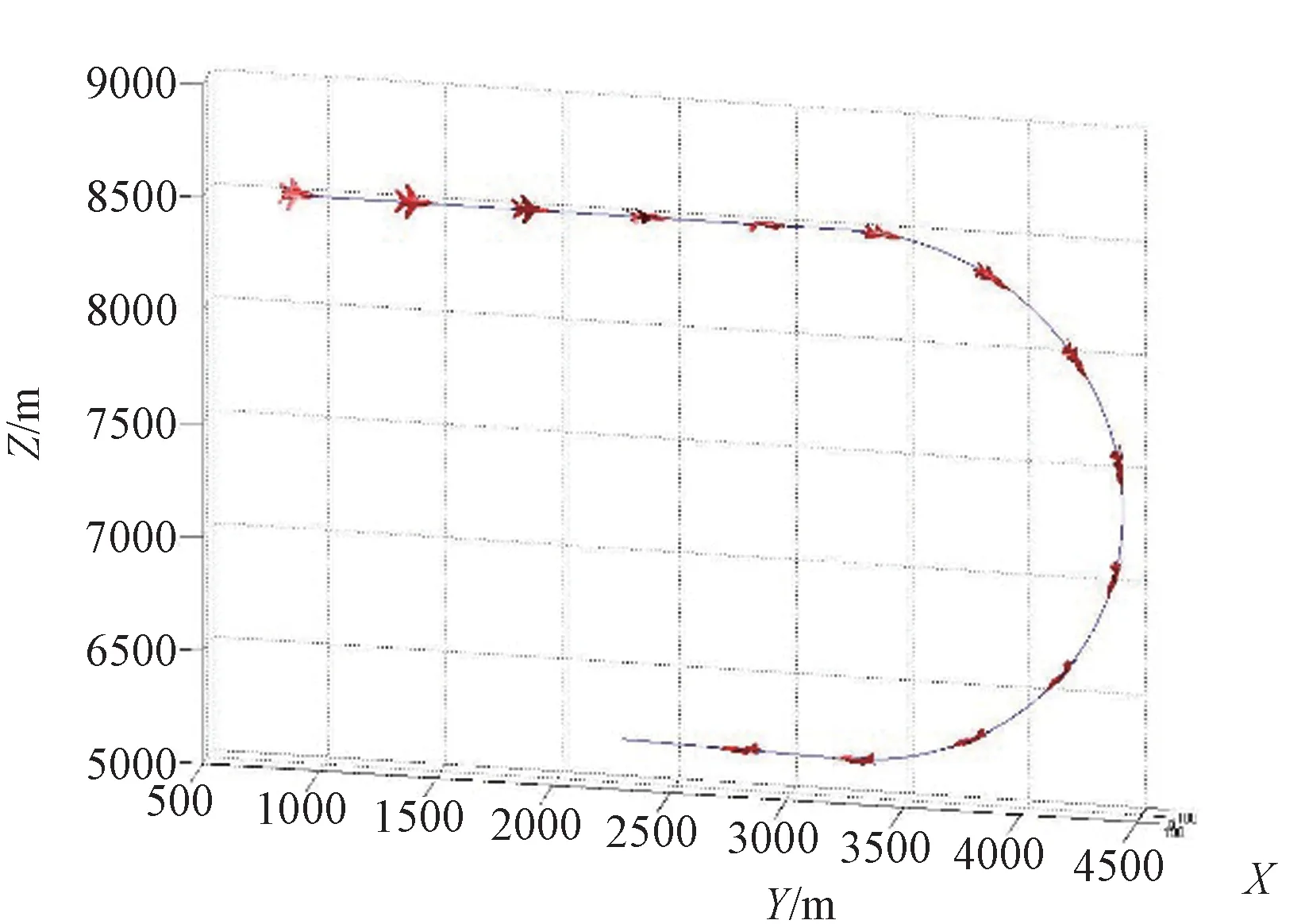
图5 半滚倒转仿真图Fig.5 Simulation diagram of half-roll and reverse
(2)加速盘旋上升
加速盘旋上升在是既能获得高度优势又能获得速度优势的一种机动方式,相对机动动作比较简单。n1、n2为过载允许范围内的值,滚转角变化率取最大值。
仿真结果如图6所示。

图6 加速盘旋上升仿真图Fig.6 Simulation diagram of accelerated circling ascent
(3)加速盘旋下降
加速盘旋下降是一种牺牲高度优势来换取速度优势的机动方式,常用于躲避敌方发射的导弹或火箭弹等武器。n1、n2为过载允许范围内的值,滚转角变化率取最大值。
仿真结果如图7所示。
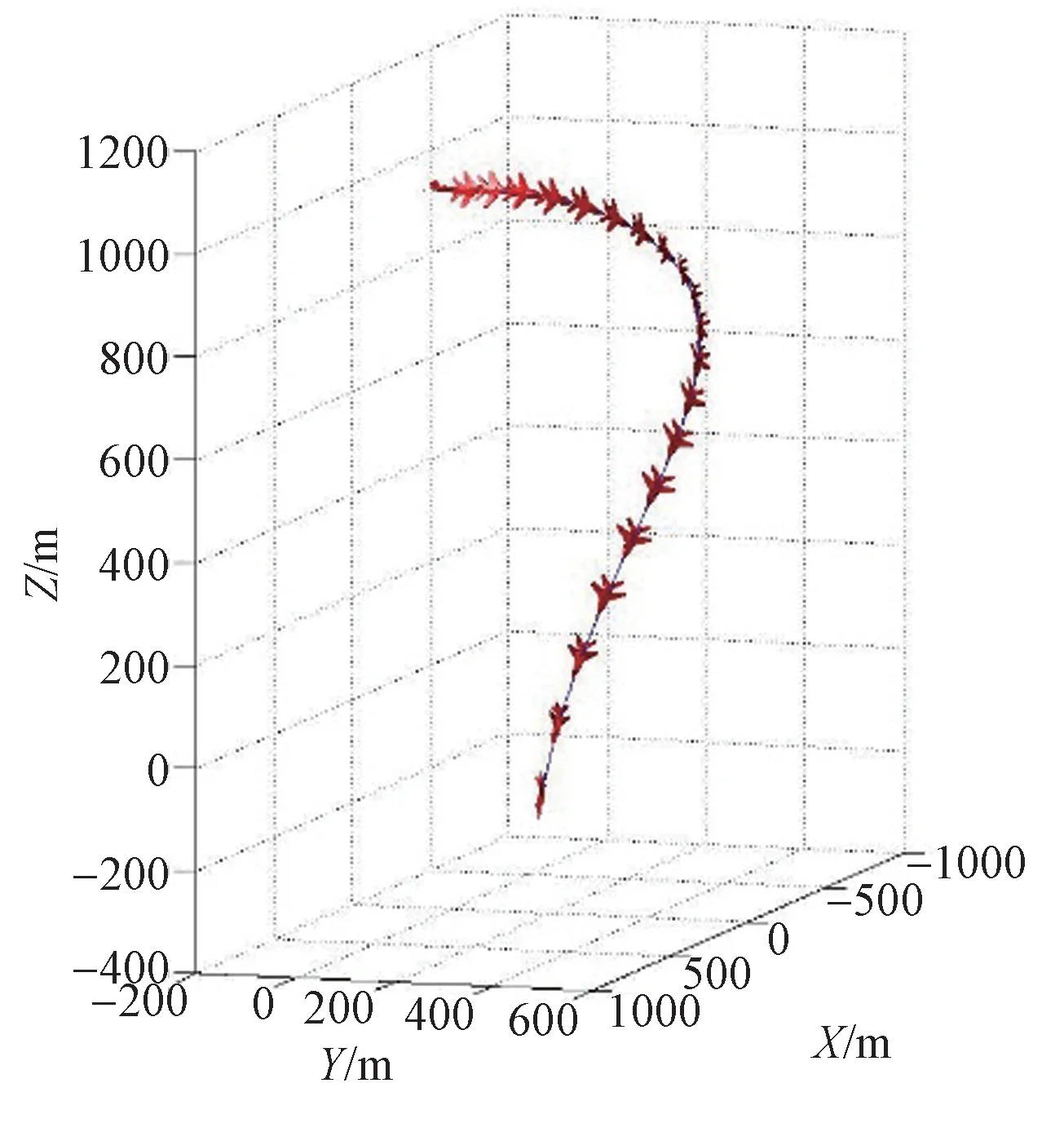
图7 加速盘旋下降仿真图Fig.7 Simulation diagram of acceleration,hovering and descending
(4)S型机动
S 型机动是一种机动轨迹呈S 形的机动动作,从而称为是S 型机动,其垂直高度不改变,在水平面内进行机动。如图8 为两个弧形大小一致的,理想状态下的S 型机动,实际中两个弧形大小往往不一致。经过对该动作进行分析,滚转角取常用值π/4。
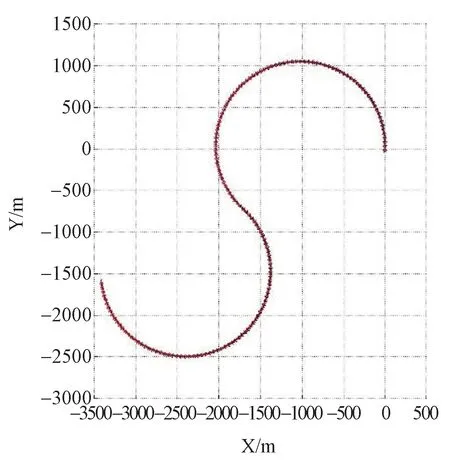
图8 S型机动仿真图Fig.8 Simulation diagram of S-type maneuvering
控制参数为:if 0 ≤t≤20

仿真结果如图8所示。
(5)高速YO-YO
“高速摇摇”机动是在UCAV 以高速接近目标时,由于错失了武器发射机会且距离较近,为避免“冲前”敌机而采取的一个战术动作。“高速摇摇”机动首先进行的是一个爬升动作,即通过爬升高度将动能转化为高度势能且避免超前敌机,既保存了能量也保持了方位优势。在爬升到一定高度后,UCAV 进行俯视观察以寻找俯冲攻击的机会;在满足一定的态势条件下,UCAV 进行俯冲机动并最终形成尾后攻击态势。“高速摇摇”机动以其灵活的机动特性和较高的战术意义,在空战中使用频繁。n2为过载允许范围内的值,L(γ)为滚转角变化率允许范围内的值。
仿真结果如图9所示。
图9 高速YO-YO仿真图Fig.9 Simulation diagram of high-speed YO-YO
4 态势函数建立
无人机进行机动的目的是在与敌机进行空战时,通过改变相对位置、速度和角度等,以获取空战优势或者改变不利态势,因此需要引入态势函数[13],通过计算所得的优势指标来评价机动的好坏,其表达式为:

其中,So、Sr、Se分别为角度优势指标函数、距离优势指标函数和能量优势指标函数,k1+k2+k3= 1,k1、k2、k3的大小代表权重系数。由于在不同情况下不同指标的重要性不同,在以航炮为武器的近距空战中,角度优势指标居主导地位,其次就是距离优势指标相对比较重要,最终才是能量优势指标。在更加贴近真实的空战态势评估中,需根据贝叶斯理论实时确定态势类型,根据变权理论动态调整指标权重。
4.1 角度优势指标函数
在空战中,敌机和本机的相对角度是一个很重要的因素,如图10所示。

图10 相对角度示意图Fig.10 Schematic diagram of relative angle
图10 中:上面的飞机代表敌机,下面的飞机代表本机,要使优势指标扩大需要做到两点:本机机头指向敌机和本机位于敌机尾部。则角度优势函数可以表示为:

AAb+BAr=AAr+BAb= π
式中,BAb为敌机的目标方位角,AAb为目标进入角。
4.2 距离优势指标函数
在本机与敌机处于安全距离的条件下,要尽量使敌机处于本机的武器射程范围内。因此构建距离优势指标函数:式中,Rc为距离差值,R为本机与敌机的实际相对距离,Rs为本机与敌机需要保持的安全距离,ad是理想中的Rc值,a0是距离优势指标函数在x轴的截距,a1表示函数Sr的垂直渐近线,aε控制函数在Rc>ad时进行衰减,以保持最优位置。
4.3 能量优势指标函数
飞机的能量优势指标包括飞行速度和飞行高度两部分。当飞机爬升时,此时速度能量转换为高度能量,占据有利位置;从高处俯冲时,高度能量转换为速度能量,因此能量优势指标函数由速度优势和高度优势两部分组成:

式中,H为飞机高度,v为飞机当前速度,g为重力加速度,1代表本机,2代表敌机。则能量优势指标函数为:

5 逃逸机动决策方法
5.1 滚动时域优化策略
19世纪70年代,滚动时域控制[9]的思想首次提出并应用于工业。滚动时域控制也称为模型预测控制,并在此基础上提出了滚动时域优化算法。将滚动优化算法应用于航迹规划,将全局规划时间分解为一系列小的连续时间窗口,并将全局优化问题转换为每个独立时域中的局部优化问题。在每一个优化时间窗口内,通过对UCAV 下一步机动位置进行预测,由于第3 部分建立的机动动作库可以用来进行“一步一判”,在优化时域窗口内进行机动决策选择动作,因此预测模型采用第3 部分建立的机动动作库。在每次时间窗优化结束时和下一次优化窗优化开始时,算法建立的反馈机制都会根据当前情况修改优化的初始值,整个过程会随着时间窗的进行不断向前滚动。UCAV可以通过该算法实现航迹在线规划,由于每一个时间窗口内的优化时间很短,一步一优化,可以应对复杂空中战场的突发情形,航迹可以满足实时性需求。
5.2 求解框架
A0、T0是攻击机和UCAV的初始状态(不只有位置信息,还包括飞行状态在内的全部信息),在k时刻,二者分别处于A(k)、T(k)状态。此时,UCAV 根据敌我信息做机动试探,在下一时刻可能选取12 个机动动作中的某一个,这些不同的机动结束状态使得攻击机对UCAV 的相对态势也各不同。其中最大值为:

式中,J表示UCAV 相对攻击机状态的评价函数,从而得到使J取最大值时对应的机动编号为p,得到最有利于UCAV逃逸的预测末状态为。
由于UCAV 真实机动动作的选择与预测机动可能不同。从k到k+ 1 时刻,从UCAV 角度出发,实际得到的最优机动动作结束状态T(k+1)可能与预测状态不同,那么就需要对下一时间窗口的预测模型做一个校正,在下一优化时刻,UCAV以自身的真实状态T(k+1)作为机动预测起点。
5.2.1 机动决策模型
第3部分建立了基本操纵动作库作为UCAV运动动作来源。UCAV 选取机动动作的标准由式(8)确定。
此处假设目标极为看重角度模糊态势参数的取值,因为角度反映了逃脱与追踪两方面的信息。基于此,选取UCAV调用机动动作的评价函数为:

式中,i表示机动动作序列,上角标t表示参数与攻击机相关。
5.2.2 仿真终止条件判据
本文以航炮作为武器,并对航炮弹丸弹道[14]进行解算,由于UCAV 为质点模型,所得到坐标为质心坐标,而真实情况下UCAV 是存在一定空间大小的,而且弹丸速度远大于UCAV 速度,因此只需对攻击机同一时间的弹丸弹道进行判断,若UCAV 与弹道距离小于2m,即可认为UCAV 被击中,即可停止优化。

式中,(X,Y,Z) 为当前时刻UCAV 坐标为航炮弹丸坐标向量。
每次滚动优化后对UCAV 与弹丸弹道进行判断,满足上述条件即达到被击中状态即停止优化。
整个滚动时域预测控制流程见图11。
图11 滚动时域预测控制流程Fig.11 Rolling time domain predictive control process
首先需要初始化时域窗口,将全局规划时间分解为一系列小的连续时间窗口,将全局优化问题转换为每个独立时域中的局部优化问题。在每一个优化时间窗口内,根据敌我信息做机动试探,选取12个机动动作中的某一个,对UCAV 下一步机动位置进行预测,计算每一个机动动作的机动位置的态势函数值,选取态势函数最大值所对应的机动动作,完成机动决策。追击机同时进行追击,对追击飞机的航炮示迹线进行计算,当UCAV 位置与航炮示迹线满足仿真终止条件时,结束仿真;若不满足,则进入下一个时间窗口继续优化。
6 基于追踪法的双机格斗仿真
在BFM对抗的追击科目中,为提高航炮的命中率,追击机常采用追踪法的导引方法进行追击,据此,我们采取追击机采用追踪法的典型态势下进行仿真,以此验证提出的逃逸机动决策方法。
6.1 追踪法
追踪法,是指在攻击目标的导引过程中,飞机的速度矢量始终指向目标的一种导引方法。则有:
其中,(X,Y,Z)为目标坐标,(XT,YT,ZT)为追击飞机坐标,θT为追击飞机速度倾角,ψT为追击飞机速度偏角。
6.2 仿真示例
在逃逸飞机以建立的基本操纵动作库中的最大过载右转机动,UCAV 初始坐标为(1000,1000,8000),初始速度为280 m/s,θT0= 0,ψT0= 0;以追踪法追击的敌机初始坐标为(0,0,8000),初始速度指向目标方向,大小为300 m/s,空战仿真结果如图12~16所示。
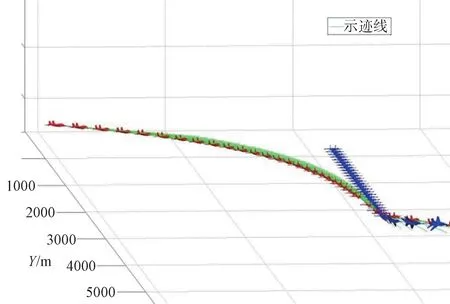
图12 逃逸过程初始阶段Fig.12 Escape process initial stage

图13 S形机动阶段局部放大图Fig.13 Partial enlarged view of S-shaped maneuver

图14 爬升机动阶段局部放大图Fig.14 A partial enlarged view of the climbing maneuver stage
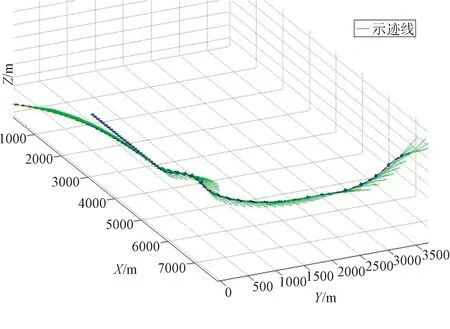
图15 逃逸过程整体图像Fig.15 Escape process overall image
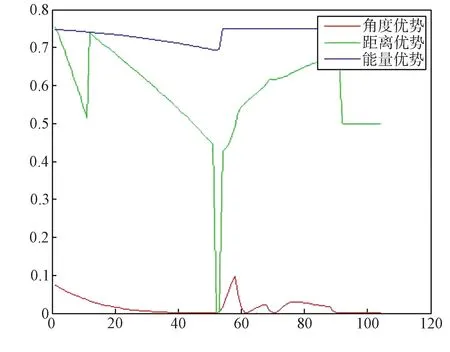
图16 逃逸过程优势曲线图Fig.16 Escape process advantage curve
结果分析:图12~15 中蓝色代表我机,红色代表敌机,绿色为航炮弹丸示迹线。初始阶段,UCAV 与敌机距离较远,尚未探测到敌机,因此UCAV 采取匀速直线运动,而敌机采取追踪法接近;在距离小于500 米时,根据提出的逃逸机动决策方法,UCAV 首先在建立的机动动作库中选择S形机动,采用S 形机动有利于避免敌机航炮构成发射条件,且由于敌机速度较大,容易造成前冲态势,之后UCAV 即可获得占后优势;在S 形机动不能摆脱敌机后,UCAV 自主决策选择爬升机动,作为逃逸策略,爬升机动能够把速度优势转化为高度优势,最终构成滚动优化终止条件,仿真结束。从优势曲线图中可以看出,由于开始UCAV 不采取机动,因此三个优势指标都在下降,之后UCAV 采取S 形机动距离优势陡降,但角度优势上升,最终采取爬升机动,距离优势上升一段后下降。由于敌机采用追踪法,基本上处在我机尾部,因此UCAV 的角度优势一直保持在一个很低的水平。
逃逸过程中,UCAV 三个角度(滚转角、航迹偏转角、航迹倾角)变化曲线如图17所示。
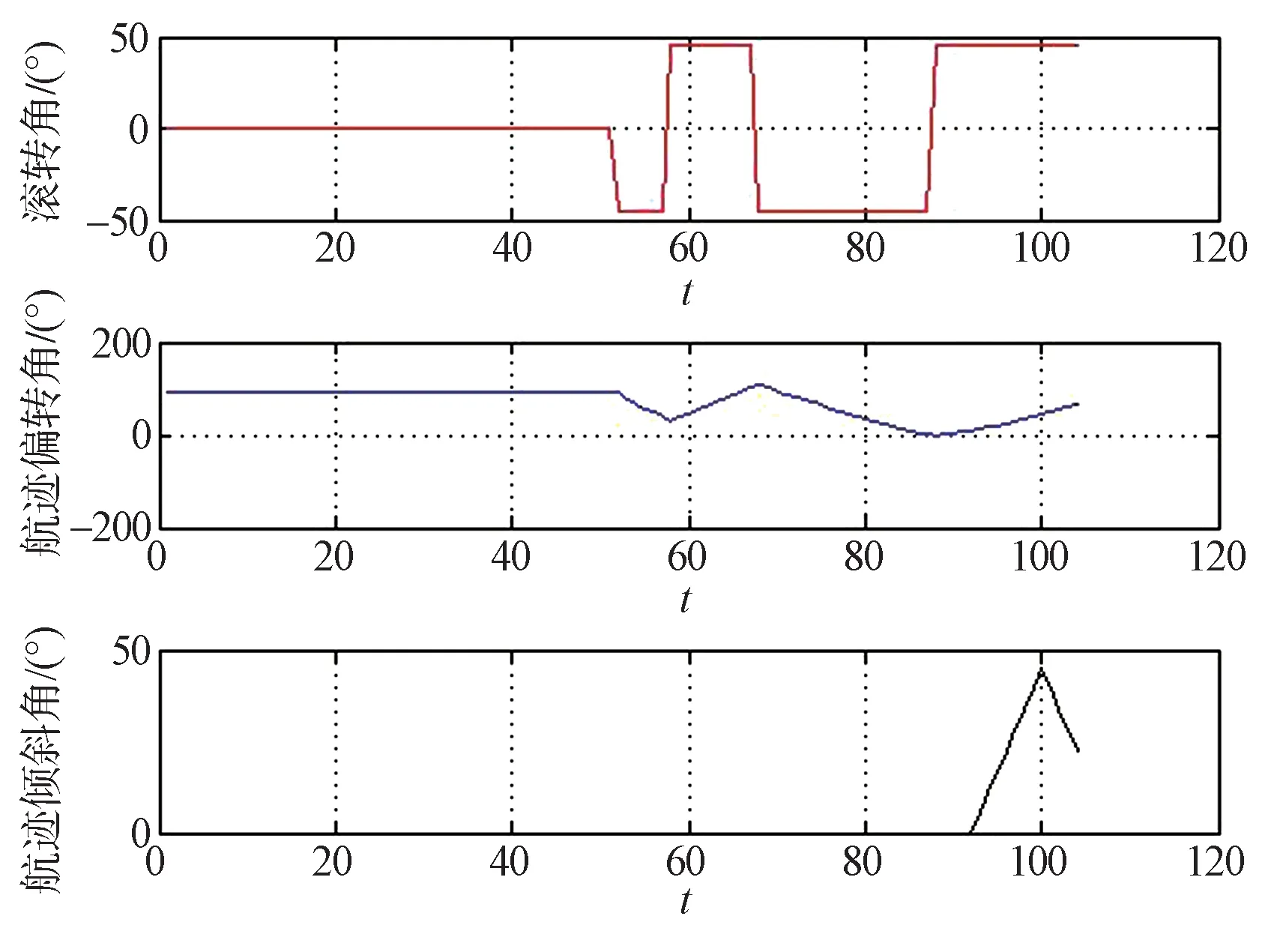
图17 角度变化曲线Fig.17 Angle change curve
UCAV的油门、迎角变化如图18所示。
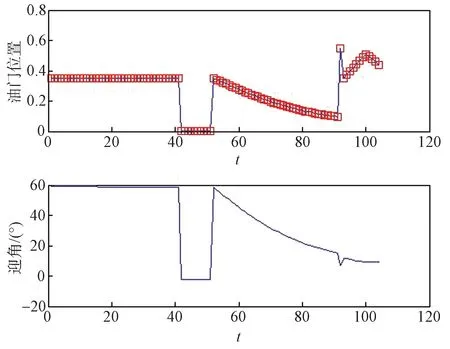
图18 油门、迎角变化曲线Fig.18 The change curve of throttle and angle of attack
UCAV 所受的升力、阻力及推力变化曲线如图19所示。
UCAV 运动的切向过载及法向过载变化如图20所示。
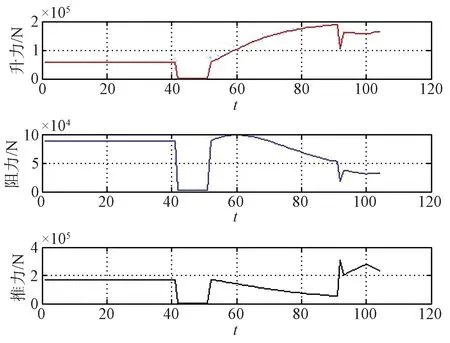
图19 所受升力、阻力及推力曲线Fig.19 Curves of lift,drag and thrust received
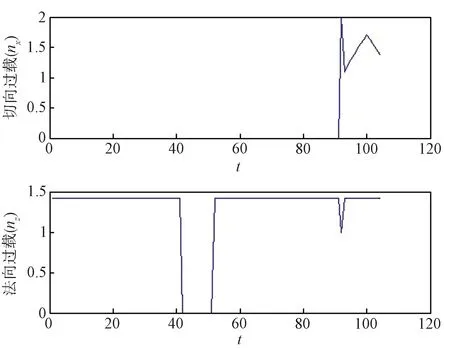
图20 切向过载及法向过载变化曲线Fig.20 Change curve of tangential overload and normal overload
7 结 论
根据空战训练模拟器BFM 对抗中追击科目的需要,建立了以航炮为机载武器的、基于拓展的机动动作库的逃逸机动决策方法,同时改进了滚动优化终止条件。仿真结果表明,该方法能实现UCAV根据不同战场态势情况快速实现机动动作选择,完成逃逸,这为空战训练模拟器中虚拟对手的研发提供了思路,也可应用到空战自主决策系统中。但也存在不足,机动动作库所含动作太少,不能保证挑选的机动动作为最优机动动作,需要接下来继续加以拓展完善。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:40
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:13:54
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
中国军转民(2017年11期)2018-01-31 02:17:42
军营文化天地(2017年6期)2017-06-28 11:30:09
百科探秘·航空航天(2015年10期)2015-11-07 07:05:14
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
小哥白尼·军事科学画报(2009年6期)2009-02-03 07:51:42