国外典型有人机/无人机协同作战项目发展分析
2020-10-16 03:43:14李磊
无人系统技术 2020年4期
李 磊
(北京海鹰科技情报研究所,北京100074)
1 引 言
2020年5月5日,波音澳大利亚公司推出了首架空中力量编组系统(ATS)无人机,距离实际部署与有人机协同作战的自主忠诚僚机更近了一步。近年来,随着自主技术、信息处理能力的发展,国外军事强国高度重视有人机/无人机协同作战技术的发展,期望短期内通过无人机与有人机的协同作战,解决有人机短板问题,具备低成本的颠覆性的作战能力。
2 有人机/无人机协同作战概述
2.1 概念的形成
有人机/无人机协同作战概念源自长机和僚机的协同作战。长机负责率领僚机执行任务;僚机负责保持编队规定的位置,观察空中情况,执行长机命令。历史上曾出现一长三僚(一架长机三架僚机)、一长两僚、一长一僚,以及六机环编队互为僚机。无人机技术的发展推进其作为僚机作战的发展,从而促进了有人机/无人机协同作战。
有人机/无人机协同作战是指有人机与无人机组成编队,协同完成作战任务,具体为:有人机发挥指控作用,可以远距探测;无人机发挥侦察、攻击、护航等作用,具备良好的隐身性、自主性且能携带制导武器;无人机位于有人机的监视范围内;在一定的通信条件下,有人机和无人机通过协同完成态势感知、战术决策、武器打击等作战任务[1]。
2.2 可执行作战任务
有人机/无人机协同作战,主要能完成的作战任务包括情报监视侦察(ISR)防御、使用延长杀伤链执行空对地打击以及防区外空对空交战等[2]。所有任务的执行,都需要自主技术的支撑。
有人机/无人机协同执行情报监视侦察任务时,需利用自主技术在任务前访问大量地形与目标数据,进而训练自主系统,以达到相关的任务传感器能快速识别优先对象的目的。基地防御场景中的无人机,可利用先进的态势感知能力,认知其物理环境。敌方飞机来袭时,可预测敌方飞行路径,并识别出口路线。无人机及与其协同的有人机将实时跟踪敌方飞机,提供敌方进入时的清晰图像。
有人机/无人机协同执行空对地打击任务时,自主技术支撑无人机识别特定目标并加以打击。具体功能包括侦察识别目标,并对优先目标排序,有人机决定使用精打武器打击目标。为了降低复杂性,有人机/无人机协同任务集中于打击固定目标。这会将更强大的有人机解放出来打击更动态的目标。无人机还可收集有价值的态势数据并将其融入有人机/无人机编队的总体态势感知中,或执行用激光指定目标引导精确弹药打击的功能。
有人机/无人机协同执行空对空任务时,有人机/无人机组合编队,能在空域部署大量传感器,极大的提高了态势感知水平。有人机与无人机的混合编队将携带大量导弹,当敌方飞机飞进无人机打击区域时,有人机作为指控节点,可利用有效的打击方式,把握打击时机。无人机可在编队前方飞行,有人机则在编队尾部飞行,这将使有人机飞行员能扮演四分卫的角色,多架飞机可提供多个打击选项,齐射攻击敌方飞机。
3 国外典型忠诚僚机的发展
随着无人机和自主技术的不断发展,美国、俄罗斯、澳大利亚推进有人机/无人机协同作战中无人僚机的不断发展[3]。
3.1 美国忠诚僚机
美国XQ-58A 女武神是美国忠诚僚机的典型代表,是美国克瑞托斯防务公司(Kratos)与美国空军研究实验室合作开发的一款高亚声速、远距离攻击的无人机。该机主要用于监视、侦察和远程作战,可提高作战灵活性和实用性。作战中,该机主要作为有人机的无人护航或僚机发挥作用[4]。
3.1.1 发展历程
XQ-58A女武神无人机是在空军研究实验室低成本可消耗飞机技术(LCAAT)项目中低成本可消耗攻击演示样机(LCASD)方案下研制的。该项目旨在通过开发卓越的设计工具和采用商业制造工艺,缩短生产时间和降低成本,从而快速设计和制造无人机。
克瑞托斯防务公司于2016年7月获得空军研究所实验室授予的4080 万美元的合同,用于开发低成本可损耗攻击无人机。该公司根据合同负责设计、开发和测试一款高速、长航时和低成本的无人机。
XQ-58A无人机的飞行试验方案包括两个阶段的5 次试飞计划。其目的是评估系统功能、空气动力性能以及发射和回收系统。截止目前,已完成四次:演示样机于2019年3月在尤马试验场完成首飞;2019年6月进行了第二次飞行试验;2019年10月,XQ-58A 在第三次试飞中,经过90 分钟的飞行后在尤马试验场坠毁,水面风大和临时飞行试验回收系统故障被确认为事故的主要原因;XQ-58A 的第四次飞行试验于2020年1月完成,在60 分钟的飞行中,该无人机展示了其在高空飞行的能力,它使用降落伞安全着陆,验证了第三次试飞后对气囊系统的设计修改。截至2020年1月,XQ-58A 无人机已累计飞行5 个多小时,超过了飞行试验方案的原定目标。
3.1.2 性能特点
XQ-58A 隐身设计使其难以被探测,其采用了简洁的机身设计(如图1),梯形机身集成了后掠式主翼、V 形尾翼及上方的进气口。该机利用商用现成的(COTS)组件,采用手动或预先编程的飞行控制系统,确保在执行任务时具有高度的机动性。该无人机长9.14m,翼展8.23m。该机的干重为1134kg,最大起飞重量(MTOW)为2700kg,最大可携带540kg 的有效载荷。开放式的任务系统结构可根据任务要求集成客户特定的有效载荷。内埋舱可挂载至少两枚GBU-39 小直径炸弹,同时机翼挂点还可携带其他武器,如表1。

图1 XQ-58女武神(Valkyrie)无人机Fig.1 XQ-58A Valkyrie UAV
XQ-58A由一台涡轮风扇发动机提供动力,其最大推力约为900kg。由于采用火箭辅助发射和降落伞回收系统,该机的起降不需要跑道设施。该机紧凑的尺寸和较少的后勤保障,保证其在偏远和受限地点的行动。该机的巡航速度为0.72Ma,可在15.24~13714m的高度上飞行,最大航程可达5556Km。
该机可与F-22 或F-35 组成编队协同作战,在有人机的指挥下实施侦察与打击任务,也可自组合形成无人机蜂群,实现自主察打一体任务[5]。
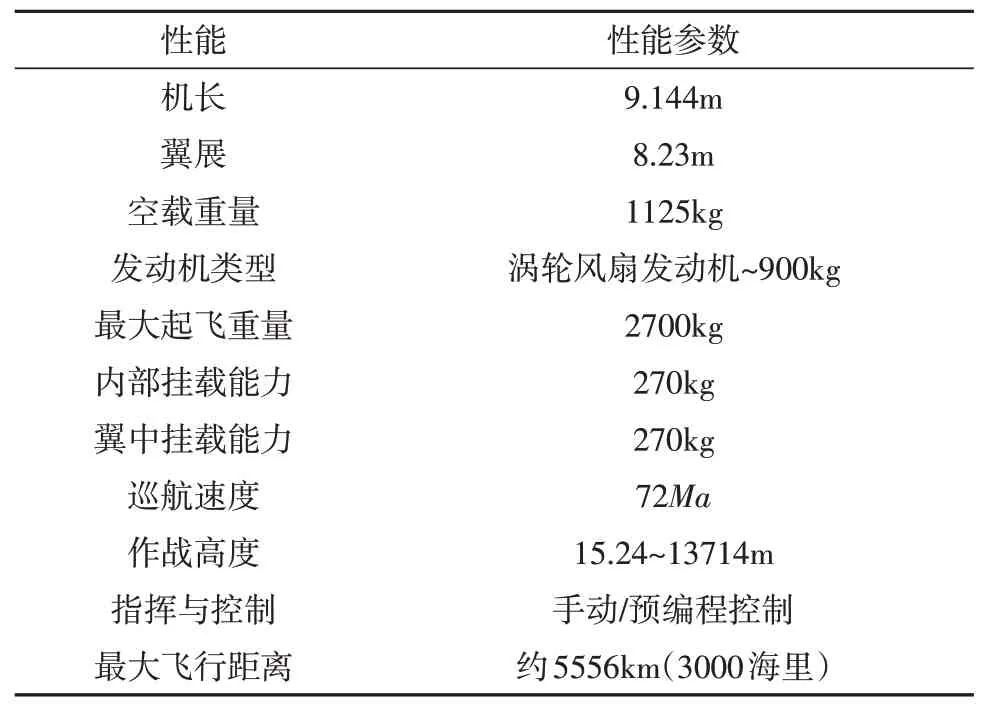
表1 XQ-58女武神(Valkyrie)无人机性能参数Table 1 Performance parameters of XQ-58A Valkyrie UAV
3.2 澳大利亚忠诚僚机
空中力量编组系统(ATS)无人机是由波音公司领导的澳大利亚工业团队合作开发的一款使用人工智能的新型无人机(如图2),可成为空军力量的“倍增器”,可执行从情报、侦察与监视(ISR)到战术预警等任务,是澳大利亚首架军用无人机。[6]

图2 空中力量编组系统(ATS)无人机Fig.2 Airpower Teaming System UAV
3.2.1 发展历程
在澳大利亚空军忠诚僚机先期开发项目的支持下,2019年2月,波音澳大利亚公司启动发展了空中力量编组系统忠诚僚机。该机是波音公司在美国本土以外研制的第一款全新设计的无人机,也是澳大利亚50年以来设计制造的第一架军用无人机。空中力量编组系统无人机可与多款战机协同作战,如E-7A 预警机、EA-18G 电子战飞机、F/A-18E/F和F-15E等。波音公司于2019年底验证了空中力量编组系统无人机的通信能力。2020年4月,由波音公司领导的澳大利亚工业团队向澳大利亚皇家空军提交了第一架空中力量编组系统无人机。该机是忠诚僚机先期开发项目中首批三架原型机的第一架,计划2020年将开展首飞验证,之后计划开展无人-无人和有人-无人编组飞行训练试验,并最终开展作战演示验证。澳大利亚政府迄今已经为忠诚僚机投入了2571 万美元,超过35 家澳大利亚工业企业在澳大利亚四个州支持原型机的建造工作[7]。
该无人机的设计目的是利用人工智能为载人和无人系统提供协作能力,是50 多年来澳大利亚设计和制造的第一架飞机,也是波音公司在美国境外最大的一笔无人驾驶飞机投资。飞机被设计使用一个数字双模来模拟它的结构、系统、能力和全生命周期要求,采用波音有史以来最大的树脂注入单一复合材料片,并使用先进的制造工艺进行组装。
3.2.2 性能特点
在有人和无人协同作战任务中,空中力量编组系统无人机具备颠覆性优势。它将提供战斗机般的性能,长11.7m,能够飞行3700km。机上集成多种传感器,支持情报、监视和侦察、战术预警任务等。
空中力量编组系统无人机旨在为全球国防客户提供转型能力,是该公司在美国以外的新无人机项目上的最大投资。这款无人机可以根据各国的具体需求进行任务安排。波音公司的澳大利亚团队开发了一款全新的无人机生产系统,澳大利亚供应商也参与其中,利用了先进制造、数字化生产和增强现实等技术。
波音公司公布的视频中,给出了ATS 特殊设计说明,可根据作战任务灵活更换机头,即将飞机机头拆下,换装不同配置的机头(如图3)。机头有4种设计,可能包括雷达、雷达与光电设备、光电设备,以及燃油箱等,对应的任务为对空、对地、侦察以及空中加油等。
3.3 俄罗斯忠诚僚机
2019年俄罗斯通过视频公布S-70 猎人隐形攻击无人机首次试飞,并指出该无人机设计的目的是与苏-57 战斗机协同执行作战任务。可以推断,S-70猎人为俄罗斯版本的忠诚僚机。
S-70 猎人无人机(如图4)在2012年由俄罗斯苏霍伊公司开始研制,2018年6月完成首次地面滑行试验。该机AL-31/41 系列涡扇喷气发动机,最大起飞重量约25t,最大飞行时速可达1400km,最大航程约为5000km[8]。该机机体大量采用复合材料和隐形涂层,且具有飞翼式布局和内置弹舱,具有很强的隐身突防能力。除具有很好的机动能力外,该机具备一定独立自主能力。目前,它已具备自主起飞并返回机场的能力。[9]

图4 S-70猎人无人机Fig.4 S-70 hunter UAV
4 国外支撑忠诚僚机关键技术项目分析
自主技术是支撑忠诚僚机用于实战的关键。目前,美国重点推进的两项技术包括空战演变项目和空中博格项目。
4.1 空战演变项目
空战演变(ACE)项目(如图5),是由美国国防预先研究计划局(DARPA)战略技术办公室(STO)2019年5月启动,旨在发展空中近距离格斗(俗称狗斗)的自主能力,提高作战人员对自主化作战的信任(如表2)。该项目是实现人机协同的具体切入点,支撑马赛克战的能力实现[10-11]。

图5 空战演变项目示意图Fig.5 Schematic diagram of Air Combat Evalution
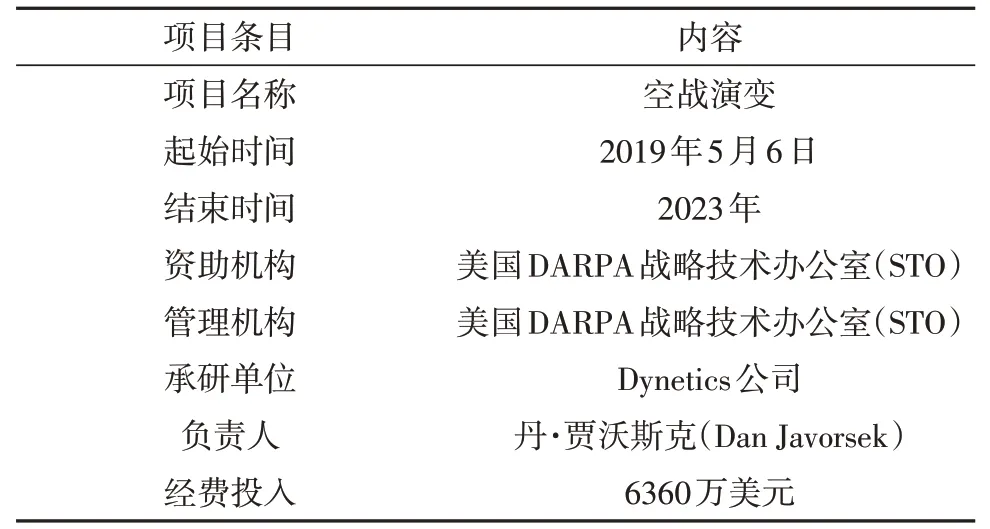
表2 空战演变项目的基本信息Table 2 Basic Information of Air Combat Evalution
4.1.1 研究内容
空战演变项目把人机协同近距离格斗自主能力的实现作为攻克重点,同时提高作战人员对自主作战系统的信任。将在逐步真实的试验环境中使用现有AI 技术进行近距离格斗;还将采用各种方法评估、校正、提高和预测人类对自主作战系统的信任程度;最后,该项目将在更复杂、具有多种飞行器,且能获得实时数据的作战级模拟场景中进行自主近距离格斗试验,以为未来的战役级现场马赛克作战演习奠定基础[12]。
该项目将从四个技术领域开展研究[13]。
(1)研发用于局部行为(个体和编队战术行为)的自主作战系统(构建近距离空战算法),开发和验证视距内个体和编队控制算法,其动态机动结果可测量人类飞行员对其信任程度。该领域前期通过阿尔法狗斗试验(AlphaDogfight Trial)竞赛,激发并扩大AI开发人员和潜在提案者的基础能力。
(2)设计实验方法,用于模拟和测量飞行员对空战格斗中的自主作战系统的信任(测量信任度)。具体包括三个方面:设计方法,用于建模衡量作战人员对自主作战算法的信任;设计和开发人机界面,用于双作战任务模式的执行和管理;构建模型,用于双任务模式下信任度的衡量。
(3)在全局行为中使用并信任自主系统(扩大至马赛克战应用范围)。具体包括四个方面:开发用于大型部队演习数据分析的数据集和模型;构建双作战任务中的任务指挥官场景;在大型部队演习中应用局部自主作战系统并进行数据分析;量化局部行为和全局行为性能标准之间的关系。
(4)建设具有作战代表性的全尺寸飞行器实验基础设施(提供全尺寸飞行器演示)。主要包括五个方面:提供全尺寸飞机并整合近距离格斗算法;为全尺寸飞行器开发和整合人机界面;保留安全驾驶员优先控制权和/或断开自动驾驶连接以进行信任评估;执行所有安全/适航审查并获得受监督的近距离格斗现场的适航认证;进行全尺寸飞行器飞行试验。
此外,项目整合团队将构建仿真架构,整合自主算法,同时对项目评估提供支持。
4.1.2 研究进度
项目分三个阶段,共持续五年。第一阶段(18个月)的重点是在模拟和仿真环境中开发和验证关键能力。第二阶段(16 个月)和第三阶段(16 个月)将分别在小型飞行器和全尺寸飞行器中进行相同任务。
2019年5月6日首次发布举办提议日通知。2019年5月17日举办工业提议日。2019年6月5日发布技术领域2、3、4 的跨部门公告。2019年6月28日发布阿尔法格斗试验竞赛公告[14]。2019年7月11日发布跨部门公告相关问题。2019年10月21日DARPA通过其官网发布公告,DARPA宣布选定八支队伍参加其组织的阿尔法狗斗试验(AlphaDogfight Trial)竞赛。2019年10月,自主研究协作网络(ARCNet)选出八个团队于2019年11月到2020年3月开发和展示其“狗斗”。2020年5月6日,授予Dynetics 公司价值1230 万美元的合同,用于完成第一阶段工作,即技术领域3 的相关工作,在全局行为中使用并信任自主系统(扩大至马赛克战应用范围)。2020年6月,DARPA 启动技术领域2的工作,委托SoarTech 公司用于建立和测量对自主系统信任[15]。
4.2 空中博格项目
空中博格(Skyborg)项目旨在发展一款模块化、类似战斗机的无人机(如图6),可快速更新复杂的自主能力,支持作战人员执行任务。美空军计划其原型机在2021年开展飞行测试,在2023年具备初始作战任务评估条件。该项目(见表3)是美空军首批“先锋计划”项目之一。所有的自主技术都可用于忠诚僚机。[16]

图6 Skyborg概念图Fig.6 Skyborg concept drawing
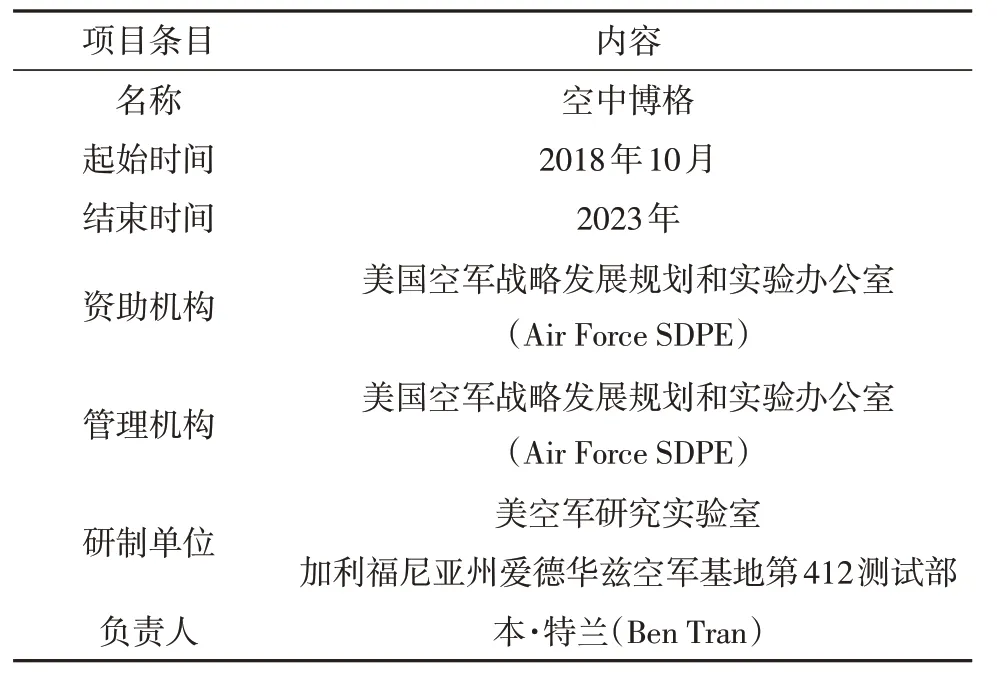
表3 空中博格项目基本情况Table3 Basical information of Skyborg
4.2.1 研究内容
美国空军建立能快速满足作战需求的Skyborg自主系统,可作为人工智能技术更新迭代的平台,在该平台上可进行人工智能技术的开发、原型设计、实验和部署。该项目旨在开发部署在无人机上的技术,使无人机具备可消耗、自主、开放架构、弹性等特征,并可作为人工智能技术迭代升级的实验平台,可在该平台上实验简单的自主飞行算法以及复杂的任务级人工智能技术[17]。
Skyborg 需要具备以下的特点,以满足未来作战需求:(1)可消耗性:需要低成本,以达到军事目的所需的损失率容忍度,需要设计成具有较高的寿命和较低的单程飞行故障概率,且被设计成可重复使用;(2)自主性:可根据外界、自身和当前态势的理解,在不同的作战行动中,能自主组合实现作战目标;(3)开放性:模块化的设计,易于第三方集成,避免技术过时、供应商特有技术以及单一供应/维护的风险;(4)弹性:具有一个或多个显著提高生存能力和/或战术能力的特征。
Skyborg 需要具备以下能力:自主避障;自主起飞和返回;有效载荷(传感器)和机身可分离,允许模块化调整;可与下一代美国空军任务规划工具兼容并可集成。
4.2.2 研究进展
2019年3月,Skyborg 项目负责人本·特兰(Ben Tran)表示曾在SCO 与罗伯一起在Avatar 项目下工作,也就是Skyborg 项目的第一代。2019年3月15日,美空军装备司令部战略发展规划与实验(SDPE)办公室正式发布Skyborg自主无人作战飞机项目能力信息征询书[18]。2019年5月,空军负责采购、技术和后勤的副部长威尔·罗珀(Will Roper)称,XQ-58A 无人机将过渡到3月公布的Skyborg 项目中,该无人机将配备新的传感器和有效载荷,并将与载人战斗机联网。2019年7月,Skyborg项目负责人本·特兰(Ben Tran)称,Skyborg 团队正在与美国空军合作制定采购战略,人工智能自主无人机研究将在空军2021 财年预算中占据一席之地。2019年7月,第412 联队的新兴技术联合测试部队在加利福尼亚州爱德华兹空军基地对复杂环境自主测试(TACE)软件进行了一次飞行测试。测试目标是验证由约翰·霍普金斯大学应用物理实验室开发的自主安全网。TACE 程序是空军研究实验室的Skyborg 计划的一部分,该程序通过与诸如自主地面和空中防撞系统等程序一起对AFRL先前的工作进行了补充[19]。2019年10月15日,美空军研究实验室发布请求,寻求一个以软件为中心的系统设计代理(SDA)的白皮书,该白皮书可以促进模块化、开放架构的方法。2019年11月21日,美空军装备司令部(AFMC)司令阿诺德·邦齐上将宣布,已选定空中博格(Skyborg)智能无人僚机、金色部落(Golden Horde)改造弹药蜂群和导航技术卫星3(NTS-3)三大项目作为其首批先锋(Vanguard)项目。空军SDPE 希望原型机可以在2021 财年进行飞行测试,在2023年底具备初始作战能力(EOC),并且该平台可用于军事任务评估。
5 对国外有人机/无人机协同作战发展的几点认识
5.1 各国积极推进无人机作为僚机的实战化应用
美国、澳大利亚、俄罗斯相继推出无人僚机型号,用途侧重各有不同,逐步推进有人机-无人机协同向实战化方向迈进。美国空军加快XQ-58A 的试验验证及相关自主能力发展如空中博格项目,美国侧重两个方面:一是与F-22、F-35 等高端有人战机协同,4~6架无人机作为僚机前出飞行,用于作战先期的“踹门”,有人机跟进打击;二是承担预警机、加油机、巡逻机等大型机的护航,主要在无人机上上加装相控阵雷达、红外载荷等加大战场态势感知能力。俄罗斯的忠诚僚机注重体系能力发展同时,强调多用途作战功能。苏-57是多用途五代机。与猎人无人机协同,构建了多用途战斗组合。
5.2 有人机/无人机协同作战探索用于空对空作战任务
DARPA 于2019年启动发展的空战演进项目是将有人机/无人机协同作战用于空对空作战任务探索的典型代表,将近距离格斗作为突破口。但目前美国的XQ-58A 女武神无人机和澳大利亚的空中力量编组系统无人机,从启动外形和采用的发动机来看,不利于近距离格斗。空对空的作战任务中,这两款无人机很可能充当有人机的导弹射手,但是其载弹量比较有限,俄罗斯的S-70 猎人无人机更有可能。目前三款无人僚机可协同有人机开展侦察探测、电子战干扰或充当有人机的替身,利用其低成本优势吸引敌方的火力。此外,无人机僚机若更好的用于空对空的作战任务,需要人工智能技术支撑,如空战演进项目和空中博格项目,这些人工智技术的开发难度不亚于无人机本身。
5.3 有人机/无人机协同作战技术聚焦于自主性、低成本和功能扩展性
有人机/无人机协同作战快速形成作战能力的关键是自主技术的支撑。为此,美国借助空战演进空中博格项目,发展有人机/无人机协同作战的自主技术。空战演进项目中的技术领域1 重点关注为单机和编队战术行动构建自主战斗能力。空中博格项目将开发自主系统的测试平台(Test Bed),促进自主技术的快速迭代。
美国的XQ-58A 与澳大利亚的空中力量编组系统无人机都注重低成本和多功能。两款无人僚机都采用数字孪生技术,大幅度降低生产成本。XQ-58A 作为F-22、F-35 等战斗机和轰炸机的僚机,在不增加预算的情况下,极大的提高了整体战斗效能。空中力量编组系统无人机更换机体的设计,可快速改变其携带的载荷,执行ISR、电子战等多种不同的任务,其与不同的飞机能够协同如E-7、EA-18G、F/A-18E 等,也体现了其作战能力的可扩展性。
6 结束语
有人机/无人机协同作战是未来智能化作战的关键现实切入点,将极大提高战场空间的感知能力、危险目标的攻击能力、电子战攻击能力等,支撑未来穿透性制空、马赛克作战概念愿景的形成。随着无人机技术、传感器技术、数据链技术、自主技术等不断发展,有人机/无人机协同作战能力将不断提升,能够执行的作战任务将不断得到扩展。后续,我们在研究过国外有人机/无人机协同作战技术的基础上,将利用对抗手段,系统对有人机/无人机在空对地打击、空对空作战中如何协同作战开展深入系统分析研究。
猜你喜欢
发明与创新(2022年30期)2022-10-03 08:40:56
小哥白尼(军事科学)(2021年4期)2021-07-28 02:15:18
小哥白尼(军事科学)(2021年1期)2021-07-16 07:21:24
小哥白尼(军事科学)(2020年12期)2021-01-18 06:10:12
小学科学(学生版)(2020年8期)2020-08-24 08:13:00
人大建设(2018年6期)2018-08-16 07:23:10
文理导航·科普童话(2017年5期)2018-02-10 19:42:14
时代青年(上半月)(2017年1期)2017-02-09 17:59:31
军事运筹与系统工程(2016年4期)2016-07-10 09:22:26
小星星·阅读100分(低年级)(2015年10期)2015-10-22 08:30:04