
四站时差定位技术研究
2020-10-16 01:04:58石伯翔郑先宝
火控雷达技术 2020年2期
石伯翔 王 超 郑先宝
(西安电子工程研究所 西安 710100)
0 引言
无源定位系统通过截获辐射源的信号实现对未知目标的定位与探测,由于系统本身不辐射电磁波,所以其具有探测距离远、隐蔽性强的特点。对信号时差的测量是无源定位的测量基础,通过测量信号到主站与副站之间的时间差实现对辐射源的定位[1]。在三维空间中对辐射源定位,时差定位系统至少由一个主站与三个副站构成。理想情况下,四站之间测得的时间差在空间中可构成三个单边双曲面,曲面的交点即为辐射源的位置。然而在实际的环境中,由于布站方式的不同和各种噪声的存在,导致解算时出现多个交点或者双曲面不存在交点的情况,此时定位就会出现模糊,甚至无解。时差定位的精度与多站排布的方式、站址误差、时差测量误差相关,常用"几何稀释因子"GDOP对其进行评估。
本文主要以三维空间四站时差定位系统为基础,分析了定位模糊、无解区域的分布规律和影响定位精度的主要因素,为实际工程中采用何种布站类型提供了理论依据。
1 无源定位原理
1.1 定位原理
要在三维空间对辐射源进行定位,需要一个主站A(x0,y0,z0),三个副站B(x1,y1,z1)、C(x2,y2,z2)、D(x3,y3,z3)构成的无源定位系统。假设辐射源位置为(x,y,z),Ri,i=0,1,2,3表示辐射源到四个站的距离,Δri表示辐射源到第i个副站与到主站的距离差,得到定位方程为
(1)
其中,c为光速, Δti为辐射源信号到达主站与到达第i个副站的时间差。对式(1)整理后可得
(x0-xi)·x+(y0-yi)·y+(z0-zi)·z
=ki+R0·Δri
(2)
其中,

由式(2)可知,其构成了一个非线性方程组,为了求解该方程组,首先将R0看做已知量,可得到
AX=F
(3)
(4)
(5)
(6)
在四站时差定位系统中,如果rank(A)=3,则辐射源位置估计值为
(7)
辐射源估计值为
(8)
其中
(9)
将式(8)代入式(1)得
(10)
解一元二次方程得到R0后,带入式(8),即可得到辐射源目标位置估计值。
1.2 时差定位无解与模糊分析
由式(10)知,求解辐射源位置的关键是要求出辐射源到主站的距离R0,其构成了一个关于系数a,b,c的一元二次方程。由该方程的性质,求解的过程中必然会出现两个根R01、R02,即存在模糊与无解的情况。式(10)中,根据判别式Δ=b2-a·c可以判断辐射源位置是否处在模糊区或者无解区[2-3]。
1)当Δ=b2-a·c<0,方程无解,定位无解;
2)当Δ=b2-a·c=0,方程存在唯一解,定位不存在模糊;
3)当Δ=b2-a·c>0,方程存在两个解,定位可能存在模糊。
当R01·R02<0,说明两根一正一负,取正值即可,不存在定位模糊;当R01·R02>0,说明两根均为正值,此时存在定位模糊。
1.3 时差定位无解与模糊区仿真
以T形、Y形、菱形、不规则布站进行仿真,站址分布如表1所示;辐射源高度7 km,站址误差30 m,时间差测量误差30 ns,仿真结果如图1至图4所示。
图中黑色区域为定位无解区,灰色区域为定位模糊区,白色区域为定位无模糊区,由仿真结果可知四种布站形式在整个定位区域基本都产生模糊或者无解。

表1 站址排布方式

图1 T形站定位模糊—无解区

图2 Y形站定位模糊—无解区

图3 菱形站定位模糊—无解区

图4 不规则布站定位模糊—无解区
1)T形站的无解区域主要分布在主站与第一副站、第二副站的延长线上并向远区四周辐射。
2)Y形站无解区域主要分布在远区四周,相比其余三种布站方式其无解区域范围较小且分布稀疏,从定位解算的角度来看,Y形站是一种较为优秀的布站方式。
3)菱形站的无解区域主要分布在主站与第一副站、第二副站的延长线和第三副站与第一副站、第二副站的延长线上并向远区四周辐射。相比于T形站,其在延长线上分布更加集中。
4)不规则布站式改变了几何中心的菱形布站,其无解区域的分布规律与菱形站相似,只是方向发生了旋转。
1.4 影响时差定位模糊区与无解区因素仿真
由以上分析可知,产生模糊的主要原因是在解算过程中出现了两个不同的正根R0,这样会使得相交的双曲面产生两个交点;而无解区意味着没有实数解R0,双曲面没有交点。在实际中因为各种噪声的存在,会使得双曲面发生偏转,从而导致没有交点。
依次改变基线长度、时差测量误差、站址误差和目标辐射源高度,仿真分析这些因素对时差定位模糊区与无解区的影响。T形站主站与副站之间基线拉长5 km,主站(0 km,0 km,0.01 km),第一副站(-15 km,0 km,-0.01 km),第二副站(15 km,0 km,-0.01 km),第三副站(0 km,-17 km,-0.01 km);Y形站时间测量误差减小为5 ns;菱形站站址误差减小为1 m;不规则布站定位高度变为13 km;仿真结果如图5至图8所示。
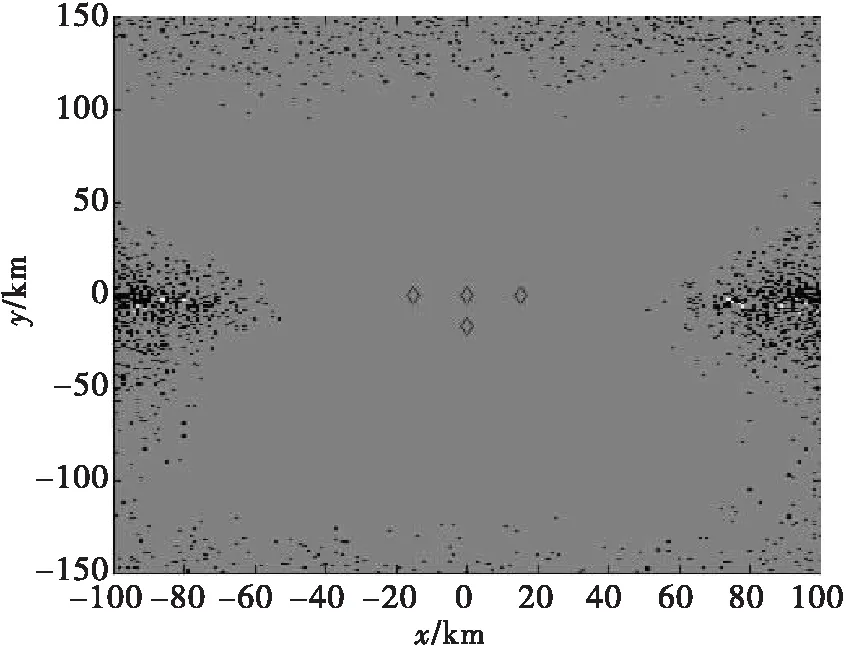
图5 改变基线长度T形站定位模糊—无解区

图6 δt=5 ns,Y形站定位模糊—无解区
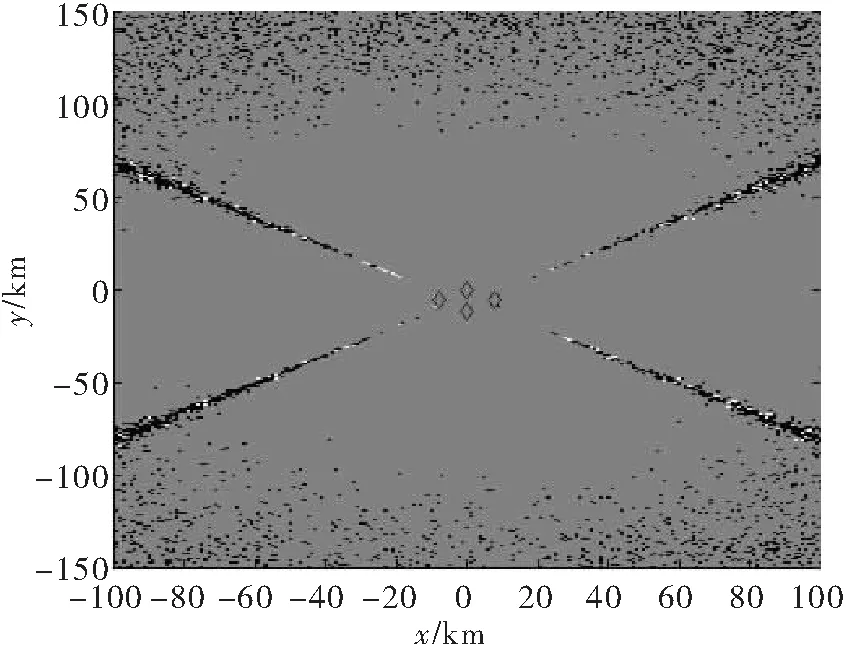
图7 δs=1 m,菱形站定位模糊—无解区

图8 h=13 km,不规则布站定位模糊—无解区
由仿真结果可知,定位无解区域得到了不同程度的改善。
1)改变基线长度后的T形站在基线延长线上和其远区四周依然存在定位无解区,但无解区的范围明显减小。
2)减小时差测量误差后的Y形站无解区基本消失,得到了一个较好的结果。
3)菱形站在基线对角线上的无解区有所减小,远区四周的无解区分布变得稀疏。
4)改变定位区域的高度后,不规则布站延长线上无解区有所减小,远区四周的无解区得到了明显的改善。
由以上结果可知,基线长度、时差测量误差、站址误差、目标辐射源高度都是影响定位无解区的因素。
2 定位精度分析
2.1 定位精度理论分析
时差定位精度用GDOP(Geometruc Dilution Of Precision)表示[4-5],GDOP值越大,定位精度越低,相反,则定位精度越高。
(11)
式(11)中δx、δy、δz为x、y、z方向上的标准差。
对式(1)中的Δri=Ri-R0求微分,化简后得到
d(Δri)=(Fix-F0x)dx+(Fiy-F0y)dy+
(Fiz-F0z)dz+(ki-k0),i=1,2,3
(12)
(13)
ki=Fix·dx+Fiy·dy+Fiz·dz
(14)
写成矩阵形式为
dΔr=F·dR+ds
(15)
其中

(16)
对式(13)求伪逆,可得到辐射源的定位误差
dR=(FTF)-1FT(dΔr-ds)
(17)
由式(14)知,定位误差与站址误差、时间测量误差和站址排布有关。假设时间测量误差经系统修正后为零均值,站址测量误差保持不变且站址误差元素之间及各站址误差之间互不相关,则定位误差协方差矩阵为
PdR=E{dR·dRT}
=C{E{dΔR·dΔRT}+E{ds·dsT}}CT
(18)
其中C=(FTF)-1FT=[bij]3×3

(19)

(20)


(21)
则可得到
(22)
2.2 定位精度仿真
由上一节分析可知,时差定位精度与站址分布、时差测量精度、站址误差等因素有关。以四站三维定位为例进行仿真分析。不同的布站方式对应不同的定位误差,站址排如布表2所示,时间测量误差100 ns,站址误差30 m,目标辐射源高度为3 km。
表2 站址排布方式
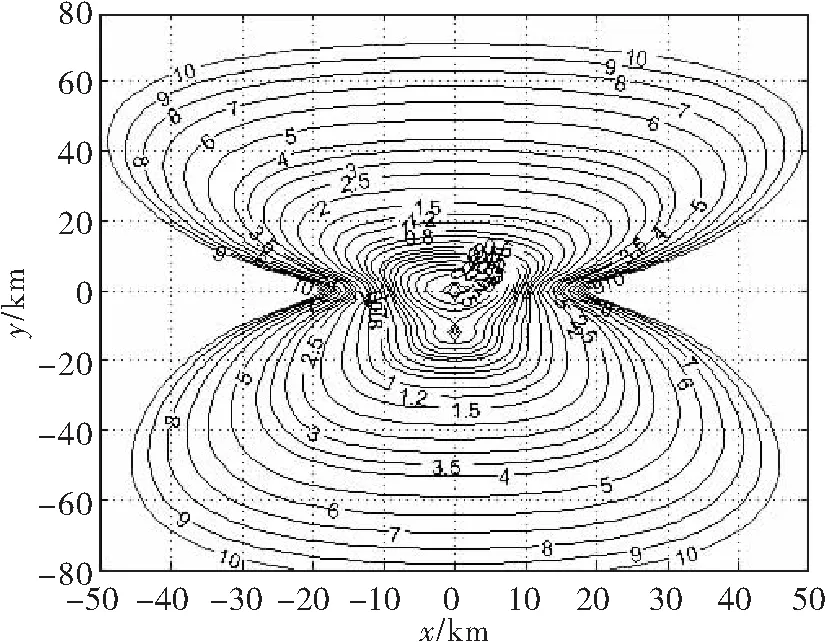
图9 T形站GDOP分布图
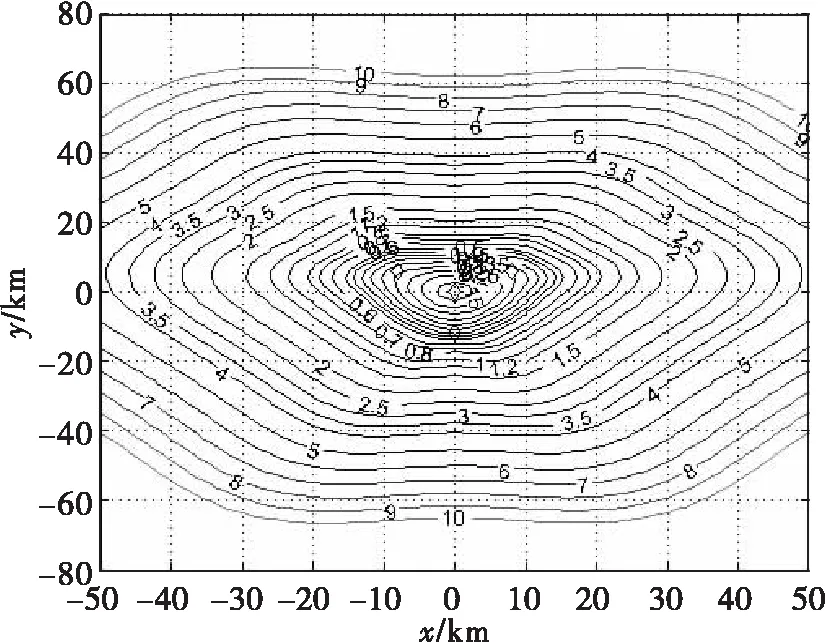
图10 Y形站GDOP分布图

图11 菱形站GDOP分布图

图12 不规则布站GDOP分布图
由仿真结果可知,不同的布站方式对应的GDOP曲线存在较大差异。
1)Y形站GDOP曲线分布比较均匀,其在探测区域任意方向上定位精度基本一致,该布站方式适合搜索探测阶段,可对未知辐射源进行全区域搜索定位。
2)T形站与菱形布站GDOP曲线有明显的方向性,T形布站在站址正前方和正后方定位精度较高,主站与其两侧副站基线连线方向上定位精度较低;菱形布站定位精度与T形站类似,在站址的正前方、正后方及两侧定位精度较高,而在基线方向上定位精度较低。在相同条件下,T形布站和菱形布站在正前方和正后方的定位精度优于Y形布站,所以这两种布站方式适合对辐射源进行二次高精度定位。
3)不规则布站是改变几何中心的菱形布站,其GDOP曲线也有明显的方向性,但与菱形站GDOP曲线相比,方向发生了旋转。若使用Y形布站对未知辐射源首次定位发现其分布在菱形布站GDOP曲线较差的方向上,可采用不规则布站的方式对其进行二次高精度定位。
2.3 影响定位精度的因素
依次改变基线长度、时差测量误差、站址误差和目标辐射源高度,仿真分析这些因素对定位精度的影响。T形站主站与各副站之间的基线拉长5 km,主站(0 km,0 km,0.01 km),第一副站(-15 km,0 km,-0.01 km),第二副站(15 km,0 km,-0.01 km),第三副站(0 km,-17 km,-0.01 km);Y形站时间测量误差为1 ns;菱形站站址误差3 m;不规则布站,目标辐射源高度10 km;仿真结果如图13至图16所示。
由仿真结果可知,基线长度、时差测量误差、站址误差和目标辐射源高度均会对定位精度产生影响。
1)主站与副站之间基线长度越长,定位精度越高。然而在实际应用中,受站间通信、站址变换控制等因素的影响,基线长度不能过长。
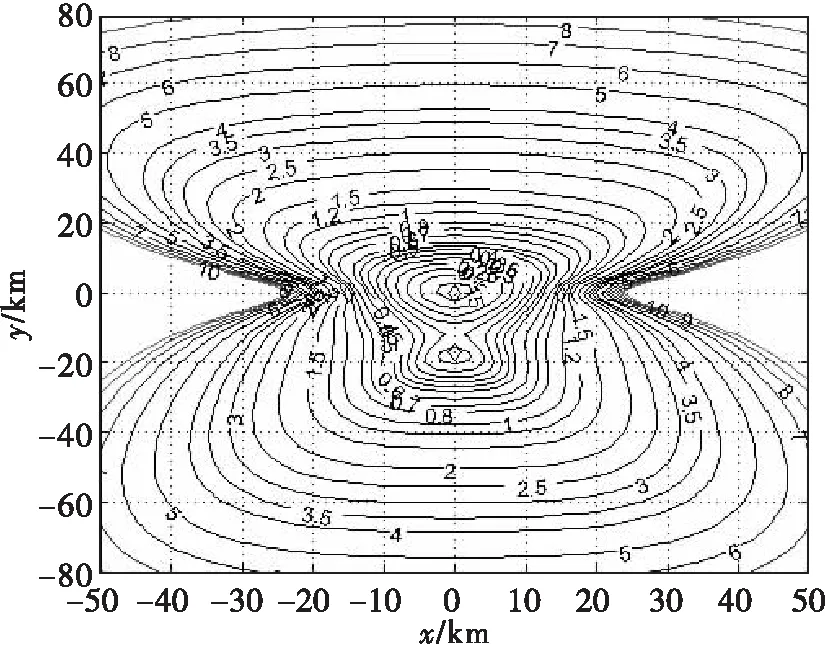
图13 改变基线长度T形站GDOP分布图

图14 δt=1 ns,Y形站形站GDOP分布图
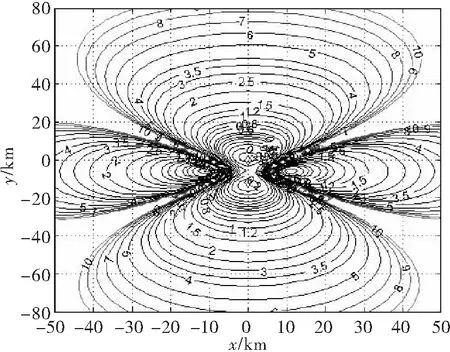
图15 δs=3 m,菱形站GDOP分布图
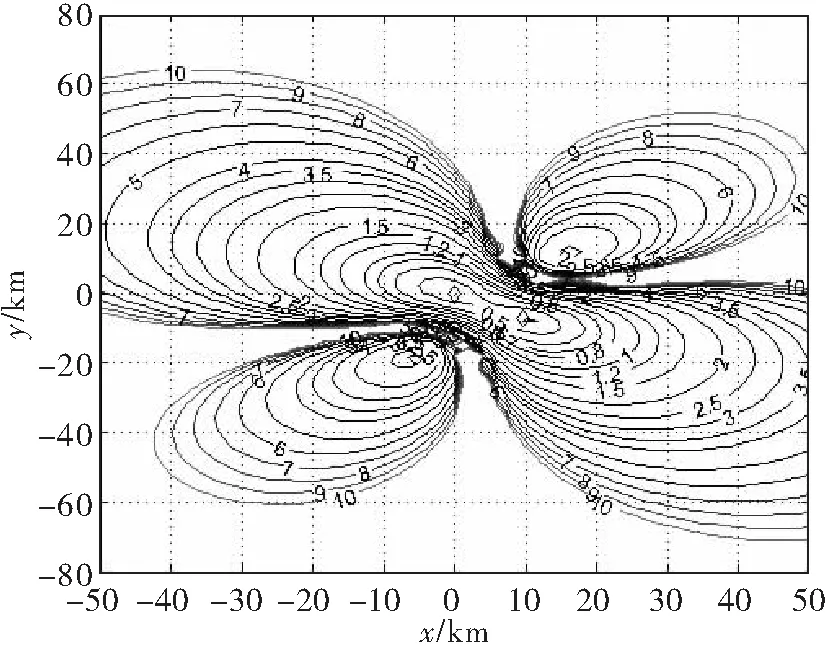
图16 h=10 km,不规则布站GDOP分布图
2)时差测量误差越小,定位精度越高。
3)站址误差越小,定位精度越高。
4)目标辐射源距离主站高度越高,定位精度越高。
3 结束语
本文介绍了四站空间时差定位解析算法并对定位方程进行了推导。分别从站址排布、基线长度、时差测量误差、站址误差、目标辐射源高度五个方面进行讨论,通过仿真分析,总结了空间四站时差定位模糊、无解区的分布规律和影响时差定位精度的因素。为在实际工程应用中采用何种站址排布对未知辐射源进行定位提供理论支持。
猜你喜欢
邮电设计技术(2023年9期)2023-10-12 08:21:50
电子技术应用(2021年8期)2021-08-29 07:00:24
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
雷达学报(2018年5期)2018-12-05 03:13:16
测控技术(2018年3期)2018-11-25 09:45:50
雷达学报(2018年3期)2018-07-18 02:41:20
测绘科学与工程(2017年4期)2017-05-25 01:48:17
电子设计工程(2017年20期)2017-02-10 03:39:23
水利规划与设计(2015年5期)2015-12-15 03:26:08
当代化工(2013年6期)2013-11-05 12:39:10
