神经网络在自由曲线插补中的应用初探
2020-10-14 01:03郑斌
网络安全技术与应用 2020年10期
◆郑斌
神经网络在自由曲线插补中的应用初探
◆郑斌
(西藏民族大学教育学院 陕西 712082)
由于运用NURBS曲线插补中求导具有误差较大、计算繁多、较为复杂等问题,因此提出采用神经网络对自由曲线进行插补,以弓高误差作为约束条件,建立起一个进给步长可变的神经网络数控插补的模型。本文主要研究了利用神经网络的非线性逼近及其自主学习的能力,通过对未知方程式曲线的辨识,实现对未知表达式曲线的插补。经过理论研究以及仿真试验表明,这样的方法能够较好的完成这一类曲线的插补。
神经网络;自由曲线;数控插补
1 引言
自由曲线主要是指部分不能用数学公式进行表示,但能够通过一些散点连接形成的光滑曲线来表示的曲线。现阶段,大多数自由曲线的分析都使用NURBS曲线模型进行研究,经过分析后得到该曲线的表达式,再按照得到的式子进行插补操作。然而,NURBS曲线建模法存在诸多的弊端,例如:计算量较大、结果误差较大、要对数学基础知识的掌握过硬等等,从而给自由曲线的插补带来了极大的困难。
基于对自由曲线研究的现状问题,可以利用神经网络对其进行插补操作。作为一种较为灵活的边缘性交叉科目,神经网络有着并行运算的优势,能够极大减少用于对自由曲线插补的时间。此外,神经网络还具有非线性逼近及其自主学习的能力,因此可以对不同的曲线或者离散点进行插补,具有较为广泛的应用。神经网络能够弥补其他插补方式的一些不足之处,保证了自由曲线插补的高效性以及准确性。本文主要利用神经网络对未知方程式曲线的辨识,从而实现对位置表达式曲线的插补。
2 神经网络中的算法与参数分析
现阶段,大部分工程当中都是把神经网络当作控制器来应用,其实现的功能就是通过对网络间连接权值的改变,使得网络结构产生改变,最终保证输入和输出符合相关的需求。神经网络技术具有各种各样的结构以及算法,其中,应用较为广泛的是基于BP算法的多层前馈神经网络,并且此种算法发展得较为成熟。算法过程如下:
(1)首先进行初始化,随机产生不同的连接权[]、[]和阈值θ、r;
(2)根据已有的输入输出模式,进行隐层以及输出层等单元的输出计算:


(3)选择下一个输入模式,返回步骤(2)操作,当网络输出误差满足要求则结束训练。
通过以上步骤,权值的不断修正使网络的误差符合要求。这时网络训练基本结束,当训练结束后,神经网络进入到后续的使用当中。
3 构建未知表达式的神经网络辨识模型
在对未知表达式模型进行处理的过程中,首先利用激光扫描或坐标测量仪等工具对模型进行测量,得到各个特征点的坐标值;然后通过神经网络的非线性逼近及其自主学习的能力,根据已有的数据点对神经网络进行训练和检验,以便完成利用神经网络对未知表达式曲线的模拟操作。
(1)辨识模型的结构
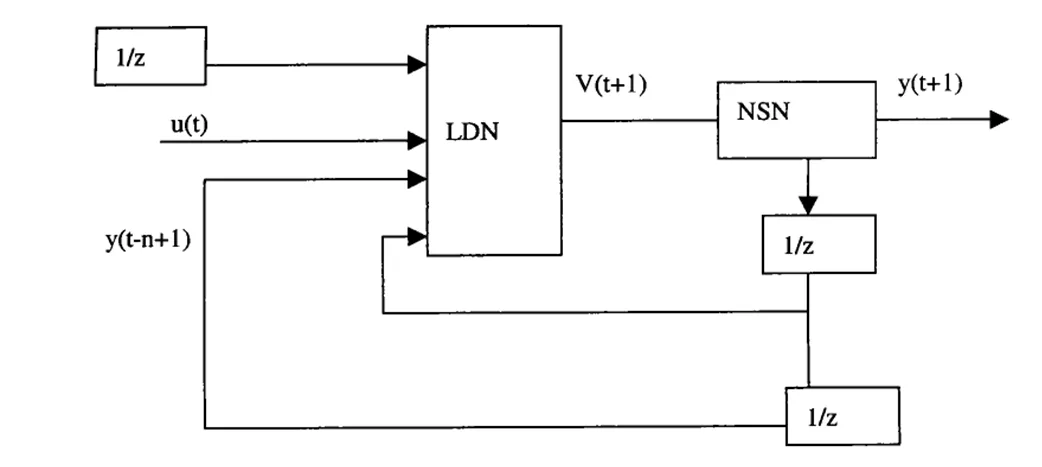
图1 NDNN模型结构图(u表示系统的输入,y表示系统的输出)
根据图一所示的非线性动态的神经网络线性动态网络(LDN)和线性静态网络(NSN)的模型,可以看出根据两者的不同特点对系统起到不同的作用。其中要对系统的动态特征加以学习,对非线性静态网络进行优化,可以对系统的非线性关系加以映射。如此,两者结合起来能够用简单的网络结果和较少的计算量、训练量,使得未知结构的非线性动态特征达到最佳状态。
(2)网络的学习过程
网络的学习过程,其核心内容就是对网络不断进行训练,通过改正其连接权值,保证网络的实际输出能够和理想的输出精度要求相符合。此外,在神经网络插补控制器进行学习训练的时候,可以利用fANN模板和插补控制器CANN连接的形式,实现对网络的学习过程。通过此种形式,能够很好省去学习过程中产生的中间数据,这样就极大提高了网络学习的质量和效率。
4 构建数控插补的神经网络控制模型
在对曲线模型进行插补的过程中,利用刀具在进行插补的时候,其速度方向也在不断发生变化。然而,由于刀具加工的速度不会无限增大,所以我们需要分别得出x、y轴的分速度变化曲线。然后对x、y两轴的速度进行计算,以便利用两轴联动来带动刀具不断朝着不同的方向进行插补。
其中,在每一段的插补内,x、y轴的运动速度计算公式为:
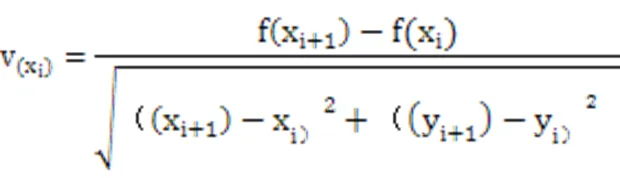
其中,f()表示刀具的进给速度,可以按照具体的加工情况进行精准地确定。
(1)网络结构分析
利用神经网络fANN对自由曲线进行构建分析后,在对其进行插补的过程中,能够利用fANN模块在不同点处获得的数据信息,并且得到在不同插补段内X轴与Y轴的运动速度,实现对两轴的驱动,以便完成两轴之间的联动,这样就可以推动刀具朝着不同的方向进行插补,从而确定刀具运动到的每一个定位点,其中,定位点的坐标需要变为直角坐标的形式。
通过对网络结构的分析,其输入层里面存在两个神经元,分别与x轴、y轴的数值相对应,输出层存在四个神经元,分别与x轴、y轴的数值及其插补后的x轴、y轴的速度相对应,这样就得到了一个单隐层的网络结构模型,其隐层的单元数设置为七。神经网络的插补控制器可以用CANN来表示。
(2)网络的数控插补原理
在周期插补的过程中,需要将未知表达式曲线上的点全部输入到fANN里面,这样就能够在fANN输入端获取相应的坐标值,将其作为插补控制器的输入数据。把数据输入到CANN里面的时候,可以得到实际的输出结果,也就是下一个插补点的坐标值及其相关的运动速度,这样就能够获取插补周期的控制命令。把此控制命令传输到机床的CNC控制系统里面,完成周期的插补操作过程。最后,把插补周期过程中得到的输出端的数据值进行反馈,将此输出值作为插补器的输入端,进行重复训练,从而实现完整的插补运算过程。
5 进行仿真实验和结果分析
为了进一步证明构建的神经网络插补模型的科学性以及准确性,可以利用MATLAB仿真软件进行测试。依据仿真的结果可以得出,利用神经网络的非线性逼近及其自主学习的能力,通过对未知方程式曲线的辨识,能够实现对未知表达式曲线的插补过程。
目前,一般都应用神经网络的插补器进行相关运算,极大改善了传统插补方式计算量繁多复杂、出错率较高的不足,这样的神经网络数控系统插补器在工作的时候只需要对下一个插补点进行插补运算,也就是说当构建好网络,在输入端位置配置好前一个插补点的坐标值,就能够在输出端得到下一个插补点的坐标值,以及下一个插补点两轴所对应的运动速度等。最后把得到的数据传输到控制系统里面,以便完成系统的自动运行。
6 结语
本文主要利用神经网络插补模型对自由曲线以及未知表达式曲线进行插补,在这一过程中,只需根据自由曲线中的部分型值点就可以完成此操作,而且不需要其他的数学计算过程。此种算法原理简单、计算量较小,并且插补精度也相比于传统的插补方式高出许多,插补速度也得到了极大的提升。
因此,我们利用神经网络插补器来对未知曲线表达式进行插补加工,这样极大提高了插补的速度以及准确率,同时也减轻了计算负担。此外,如果想要进一步的提升神经网络的逼近水平,减少加工的误差,可以对相关的学习算法进行优化与改进。
[1]邬再新,李华兵.神经网络在自由曲线插补中的应用研究[J].组合机床与自动化加工技术,2019(2):49-52.
[2]李华兵.神经网络在自由曲线插补中的应用研究[D].甘肃:兰州理工大学,2019.
[3]刘少贞.基于RBF神经网络的四轴机器臂轨迹规划研究[D].陕西:西安工业大学,2016.
[4]夏炎.多关节机械臂轨迹规划和轨迹跟踪控制研究[D].黑龙江:哈尔滨工业大学,2017.
[5]徐扣.六自由度机械臂的逆运动学求解与轨迹规划研究[D].广东:广东工业大学,2016.
猜你喜欢
现代电力(2022年2期)2022-05-23
初中生世界(2020年47期)2021-01-07
安顺学院学报(2020年1期)2020-04-05
电子制作(2019年19期)2019-11-23
现代计算机(2019年6期)2019-04-08
电子制作(2019年24期)2019-02-23
农业与技术(2018年18期)2018-12-18
现代计算机(2018年16期)2018-07-06
北京航空航天大学学报(2017年12期)2017-04-23
商(2012年11期)2012-07-09