超声波传感器泊车辅助系统
2020-10-13 12:16蒋攀陈新全万想
西部论丛 2020年1期
蒋攀 陈新全 万想


摘 要:随着我国经济水平和人民生活水平的不断提高,近年来国内私家车的数量不断增加,据有关部门统计数据,截止到2018年6月底,全国机动车保有量达到3.19亿辆,全国获得机动车驾驶资格的人数达3.96亿人,仅2018年上半年全国新增驾驶人数量就达到1325万人。而对于驾驶经验不足的新驾驶员来说,泊车则是一大难题,通过超声波传感器和陀螺仪的数据融合判断障碍物的精确方位和深度信息,再通过语音合成进行障碍物信息的语音播报。提出了平行泊车和垂直泊车两种泊车情景下车身姿态角的主次要参数确定,泊车质量的评估依据会随着车位周围障碍环境的变化而进行變化。
关键词:超声测距;环境障碍预警;泊车辅助
一、引言
自动泊车系统作为近年来汽车领域智能化进程中的一个研究热点,受到各大汽车厂商以及配件厂商的关注,但是由于硬件和技术的局限性,各种自动泊车系统的稳定性和可控性都不太成熟,而且成本较为高昂,多用适配于中、高级乘用车上,无法下放到占有大部分市场份额低端车型。此外,近些年出现的全景泊车影像系统也属于泊车辅助系统之一,但此系统仍具有成本较高的问题,另外摄像头的使用受光线和天气的影响较大,使得使用时间和场景受到限制。
针对这些问题,本项目的研究目的是:设计一种能够在低速行车和泊车过程中实现车辆碰撞前的预警、且成本较低的、针对于驾驶经验不足的驾驶人员的、应用于由传统辅助方案过渡到智能化方案期间的一种基于超声波传感器的驾驶辅助系统。此系统能够在特定的泊车情景下,对车位内外一定距离内的障碍物进行检测,并通过显示或声音的方式反馈给驾驶人员,实现泊车过程中环境障碍物预警功能,有效的帮助驾驶人员降低发生碰撞、剐蹭的几率,保证其乘车人员的生命安全和经济利益。在驾驶人员结束泊车动作后,系统能够对泊车质量进行评估,若有车身歪斜或与障碍物距离过近的情况能够及时提醒驾驶人员以便做出调整。
汽车前、后雷达的使用基本已经普及,技术较为成熟,能以声音等形式告知驾驶员车身周围障碍物的情况,以排除泊车和启动车辆时前后视野盲区为驾驶员带来的困扰;倒车影像的加装能够有效的提升前、后雷达的辅助功能,比起声音来说更为直观的告诉驾驶员车身尾部障碍物情况。以上两种装置技术成熟,成本较为低廉,但是功能局限于汽车前后障碍物提醒,且只能用于泊车、启动情景中。
二、项目的技术路线与方案
2.1系统预期功能分析
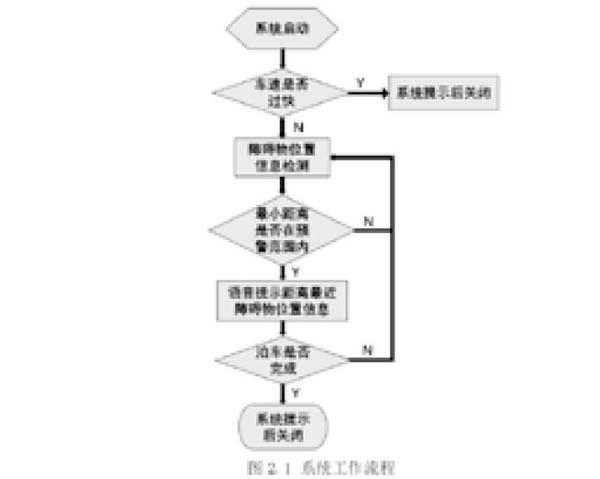
泊车辅助系统的工作流程如图2.1所示。
泊车辅助系统在缓速泊车或行驶时由人为激活,在使用过程中不断的检测周围行人、车辆、路肩等障碍物情况,需要实时判断障碍物与车身距离及障碍物的方位,因此,需要在车身上安装一定数量的环境感知传感器,同时需确定车身姿态角以判断车身相对位置及转角,需要使用角度感知传感器。
当驾驶员驾驶车辆准备进行泊车、行驶到宽度较为狭窄的道路或交通较为拥堵的路段不易通行时,驾驶员可开启泊车辅助系统,系统会实时的播报车身周围环境障碍物距离,供驾驶员提供速度和方向上的参考。
由于泊车情景较多,目前绝大多数泊车辅助系统并不能准确及时的判断是否进行,所以人为通过按键或语音激活系统的方式更为可靠。本项目考虑到此系统在缓速行车的条件下具有避障功能,且会出现车身内外环境较为嘈杂的现象,故采用按键手动激活的方式来激活泊车辅助系统。
通过超声波传感器、陀螺仪和加速度传感器的数据融合判断障碍物的精确方位和深度信息,再通过语音合成进行障碍物位置信息的语音实时播报。在较为复杂的泊车
2.2系统组成
搭建合理且符合实际应用的系统架构是实现系统完整功能的关键。泊车辅助系统的架构设计必须兼顾控制的便利性及可扩展性,同时要充分合理地分配硬件资源以达到性能最优且适应性强。从实际技术需求和资源配置出发可将系统分为三个模块进行分析:环境感知模块、数据运算模块、命令执行模块。
环境感知模块:感知模块需要能够较为全面的探测车身周围的环境信息,本文选用8个短距离超声波传感器(UPA)、4个长距离超声波传感器(APA)共12个超声波传感器外加1个电子陀螺仪构成环境感知模块。其中,4个UPA用于探测车身前方障碍,另外4个UPA用于探测车身后方障碍,4个APA用以检测车身左右两侧与障碍物距离用于姿态角(α)计算。多个、多种传感器的配合使用能够使系统能够识别更复杂的多障碍物场景,保证了泊车过程中的安全性。
数据运算模块:运算模块需要具有快速的数据处理能力,可以快速实现障碍物方位、距离判断和姿态角计算等任务。综合考虑自动泊车系统的功能要求,对于决策模块的需求应满足以下条件:具备较多的I/O端口,可以实现与各模块之间的通信;抗干扰性强,能够在较为恶劣的工况下实现稳定的工作;成本较低,便于调试和载入程序。基于上述分析,本系统选用低成本的32位的MCU作为数据运算模块。
命令执行模块:执行模块的主要功能是将运算模块所做出的决策结果合成语音然后通过扬声器将信息传递给驾驶员,考虑到汽车内部空间、外部环境噪音和成本等综合因素,可采用语音合成芯片配合车内扬声器使用实现语音播报。
2.3实验模型设计
综合考虑硬件成本、时间期限及复杂程度等因素,本项目决定采用搭建小车模型的方式调整系统算法以及验证系统的部分功能,同时为进行系统仿真奠定一定的基础。由于本系统的关键在于将车身与各个方位障碍物的距离进行对比分析且经过计算后转换为语音信号让扬声器播出,所以搭建的小车模型应具备以下条件:
(1)运动功能:小车应该能够实现的基本的前进、后退、向左和向右转弯等功能;
(2)远程遥控功能:能够在手机APP或其他遥控器的远程操作下实现对小车进行实时远程控制以完成运动动作;
(3)其他条件:小车的运动速度不能太快,以保证泊车时系统的及时反应,另外超声波传感器的安装位置需大概与实车安装设想保持一致。
注:由于小车模型只用于障碍物距离检测并输出算法的验证,故不用启用与实车相当数量的超声波传感器,且使用一种超声波传感代替APA与UPA两种超声波雷达,另外陀螺仪用于确定车身姿态角,也不用设计到小车模拟系统中。
小车模型整体的机构设计如图2.4所示:
小车模型的控制核心应该具备与外部设备建立通信联系、控制小车的电机转动速度、较快的数据处理等功能,综合考虑以上功能需求和成本控制问题,小车模型的微处理器选用综合性能较好的STM32F1系列芯片。该芯片具有功耗较低、性能高及成本低等显著优势,能够实现对外部设备的良好控制;此外,STM32处理器的性能优势較为明显,在工业及消费行业的应用较为广泛,操作使用难度也适合本项目的需求。
其他各模块主要功能如下:
(1)系统中各个功能模块使用不同的工作电压,需要电源模块分别提供不同的电压给各个模块正常工作。
(2)蓝牙模块主要负责小车和手机之间的数据传输,以便能够通过手机发出指令使得小车做出相应的动作。
(3)电机驱动模块的作用是驱动小车车轮的转动,如正转,反转,停止等。
(4)舵机驱动模块主要驱动舵机的正反转通过机械结构实现前轮的左右转向功能。
(5)超声波模块通过向各个方位不停的发射、接收超声波来探测车身周围的障碍物的位置信息,然后发送给微控制器进行数据处理。
(6)语音合成模块的功能是接收微控制器经过运算处理后输出的数据信号,然后转化为中文语音信息并输出。
三、系统仿真与验证
在进行系统仿真前中,首先应该建立泊车障碍物模型和汽车运动学模型。在真实的泊车情景中会有很多种障碍物分布情况,例如垂直泊车情景下车位最多有三侧具有障碍物车辆,最少只有左、右或前后中的一侧具有障碍物车辆。所以障碍物模型的建立应该具有普遍性,能够模拟各种合理条件下的车位状况,从而能够让系统在各类条件下进行仿真验证。
为确定车身周围障碍物信息和超声波传感器距离分布等信息,应该先确定车身基本参数、参考轴线和规定方向等汽车车身信息,所以还需要进行汽车车身模型的构造。可以根据汽车的动力学方程构造车身模型:
φ'=-(v/t)*tgθ
x'=-v*cosφ
y'=v*sinφ
式中:
φ为汽车的车轴和水平方向的夹角;
θ为汽车的前轮和汽车车轴的夹角;
x、y、z分别为3个控制状态变量。
当系统的各类硬件参数确定好并搭建好系统后,开始进行系统仿真以验证系统的可靠性和稳定性,经过综合对比与分析决定使用MATLAB的Simulink工具进行仿真。
Simulink是MATLAB中的一种可视化仿真工具,它提供一个动态系统建模、仿真和综合分析的集成环境,使用人员无需大量书写程序,通过简单直观的鼠标操作,就可构造出较为复杂的系统。被广泛应用于各类系统、数字控制及数字信号处理的建模和仿真中。
首先,用MATLAB的Simulink工具建立仿真环境,上述的小车动力学模型,建立“车辆模型”模块,其输入量是车辆运行速度、转向角和障碍物距离信息,输出量是车身体位置和车身姿态角,其中“陀螺仪”和“超声波传感器”模块实现了对真实传感器的模拟,可模拟出车身实时的位置信息;传感器的检测结果经过预处理后,输入到“控制器”模块;“控制器”模块是代表MCU的控制和处理功能,通过微电路连接和程序运算来实现;“控制器”模块的输出量是车身具体方位和能够由语音合成模块所识别的障碍物信息,其中障碍物信息包括距离车身最近障碍物与车身的距离以及障碍物与车身的相对方位,以便能够由语音合成芯片直接将信息转化为中文语音。在仿真过程中,将车辆的状态和控制器输出值实时记录到数组中,以方便绘制各种曲线图。
最后将仿真过程中各种不同障碍物条件下所输出的语音预转化信息与所设定障碍物信息进行对比就能得到整个泊车辅助系统的可靠性与稳定性。结合仿真系统所输出的图像、数据等信息就可以方便做出硬件选择、安装位置及运算策略等方面的调整。
四、实用性分析
情景一:在车辆或人群比较密集的道路条件下,驾驶员保持低速行驶,但由于驾驶经验不足,无法在车内准确判断车头和车身两侧与车辆或行人的安全距离,特别是车头右侧周边区域是最大的视野盲区。在此种情况下非常容易与其他车辆发生轻微的剐蹭、碰撞或对行人造成撞击、擦伤。
情景二:在泊车区域比较狭窄和拥挤的情况下,不管是倒车入库还是侧方位停车时,都容易因视野受到限制而无法判断车身与障碍物安全距离,仅在倒车雷达和倒车影像的辅助下并不能完全解这一问题,而导致自身车辆的损伤同时对其他车辆也造成损伤。
在低速行车和停车过程中不小心发生碰撞、剐蹭事故是令很多乘用车司机头疼的问题,特别是对于刚拿到驾驶证的新司机来说更是家常便饭,市场上现有的一些智能泊车系统能够在特定条件下代替司机完成停车这一动作,不过由于成本原因,这种功能一般只有较为高档的轿车才会配备,然而调查数据显示装有泊车辅助系统的车型只有很少的一部分且价格都较为高昂,说明大部分驾驶员发生轻微事故后更多的是通过保险的方式进行解决,虽然不用自己承担所有修理费,但保险费用也会相应的上升造成车主一定的经济损失,此外,由于事故而损坏的车身部件从资源角度来说也是一种资源损失。本项目所设计的系统由于成本较低,能够适配于更多的普通车型,甚至能够通过后期加装的形式进行使用,能够有效的降低发生碰撞、剐蹭事故的几率,保证驾驶员及乘车人员人生安全和经济利益。
参考文献
[1] 汪卓然,石伟华,殷月园,董金林.中国汽车保有量增长大环境下停车场的现状与创新[J].产业与科技论坛,2017,16(11):94-95.
[2] 左培文,孟庆阔,李育贤.自动泊车系统发展现状及前景分析[J].上海汽车,2017(02):44-46+56.
[3] 单新平,蒋云峰,刘宗健.基于超声波倒车雷达的研究[J].汽车电器,2019(07):20-22.
[4] 杨德明.基于低成本硬件的泊车辅助系统研究[J].自动化技术与应用,2016,35(11):92-97.
[5] 宋金泽.自主泊车系统关键技术研究[D].国防科学技术大学,2009.