
某型无人机油门电机工作异常情况分析与研究
2020-10-12 14:08姜杨
无人机 2020年4期
姜杨
针对某型无人机油门电机工作异常情况,从4个方面进行排查,分析了该型无人机收油门回路工作原理,采取更换发动机电缆和更换飞控计算机信号接口板的方法,解决了异常情况。
飞行速度是无人机的主要性能参数之一。无人机速度的控制方法,主要是通过飞控计算机控制油门电机转速或者开度大小,从而控制发动机推力大小来实现。某型无人机在地面综合测试过程中,无人机收到起飞指令发出后。油门推至修正额定,模拟离车进入程序控制阶段,20s后油门应由修正额定收至额定,但油门电机未动作,地面检测软件显示油门电机停留在修正额定位置,程序段结束后多次指令推收油门,油门电机只响应推油门指令,收油门指令均不响应,通过操作台手动推收油门,响应正常。即油门电机响应指令收油门故障。
故障排查与定位故障排查过程
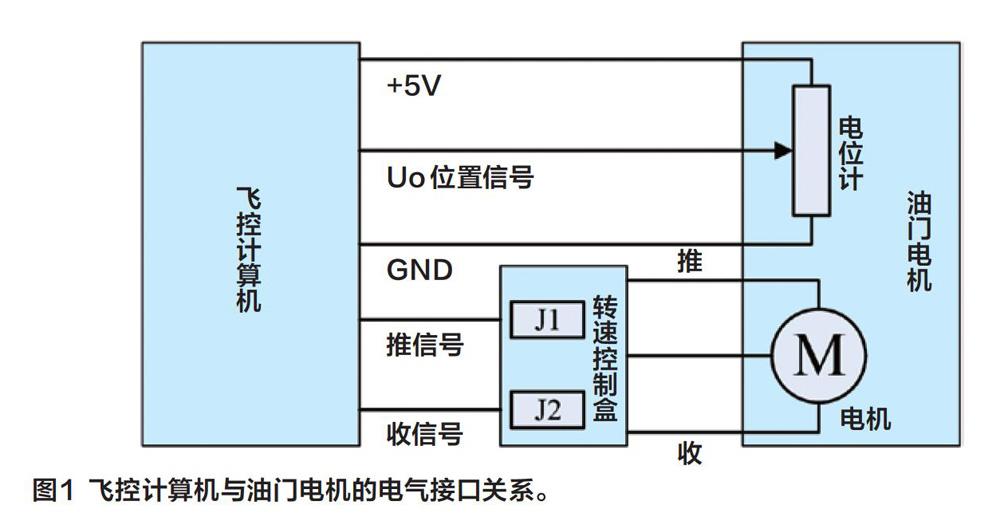
无人机飞控计算机输出控制信号实现对油门电机位置的闭环控制,同时通过地面操纵台实现油门电机推收的开环控制,便于地面发动机试车和调参。飞控计算机与油门电机的电气接口关系如图1所示,飞控计算机推、收油门指令通过控制继电器J1、J2的通断实现对油门电机的推和收。
分析该故障现象,导致油门电机工作异常的原因主要有以下几方面。
(1)油门电机失效;
(2)机载电缆故障(油门控制线开路或者短路);
(3)转速控制盒故障;
(4)飞控计算机故障(油门输出部分失效)。
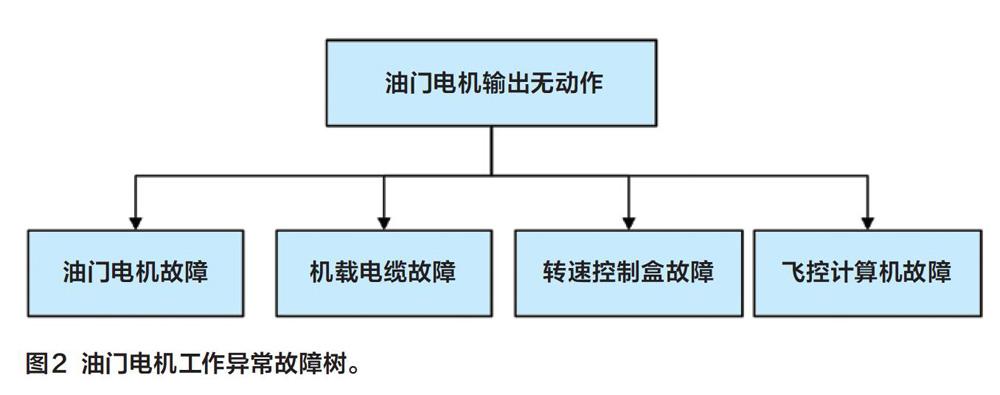
油门电机工作异常故障树如图2所示。根据故障树所列情况对涉及的航电部件逐一排查,具体内容和结果如下。
(1)在试验现场通过更换同型号油门电机进行测试,故障现象仍存在,且手动收油门时,油门电机动作正常,因此油门电机失效的可能性排除;
(2)对飞控计算机油门输出端的推收两路负载情况进行电阻测量,发现推油门一路阻值为317Ω左右,而收油门一路阻值为18Ω。初步判断电缆回路或电控盒回路存在短路现象,对机身电缆和发动机电缆进一步排查;
1)拔下机身电缆和发动机电缆对接连接器K40,进一步用兆欧表检测机身电缆收油门指令线缆XJ1:37、38,绝缘电阻值正常,排除机身电缆故障的可能;
2)拔下转速控制盒接插件K54,用兆欧表检测发动机电缆收油门指令线缆K40:16,绝缘电阻值为0,有短路现象。
机载电缆故障导致油门控制异常的可能性无法排除;
(3)对转速控制盒进行单独测试,工作正常,转速控制盒故障导致无法收油门的可能性排除:
(4)对飞控计算机进行部件级测试,发现无法收油门功能失效,与机上出现的故障现象一致,结合2)的分析,飞控计算机收油门功能的异常为电缆短路所致。
故障定位
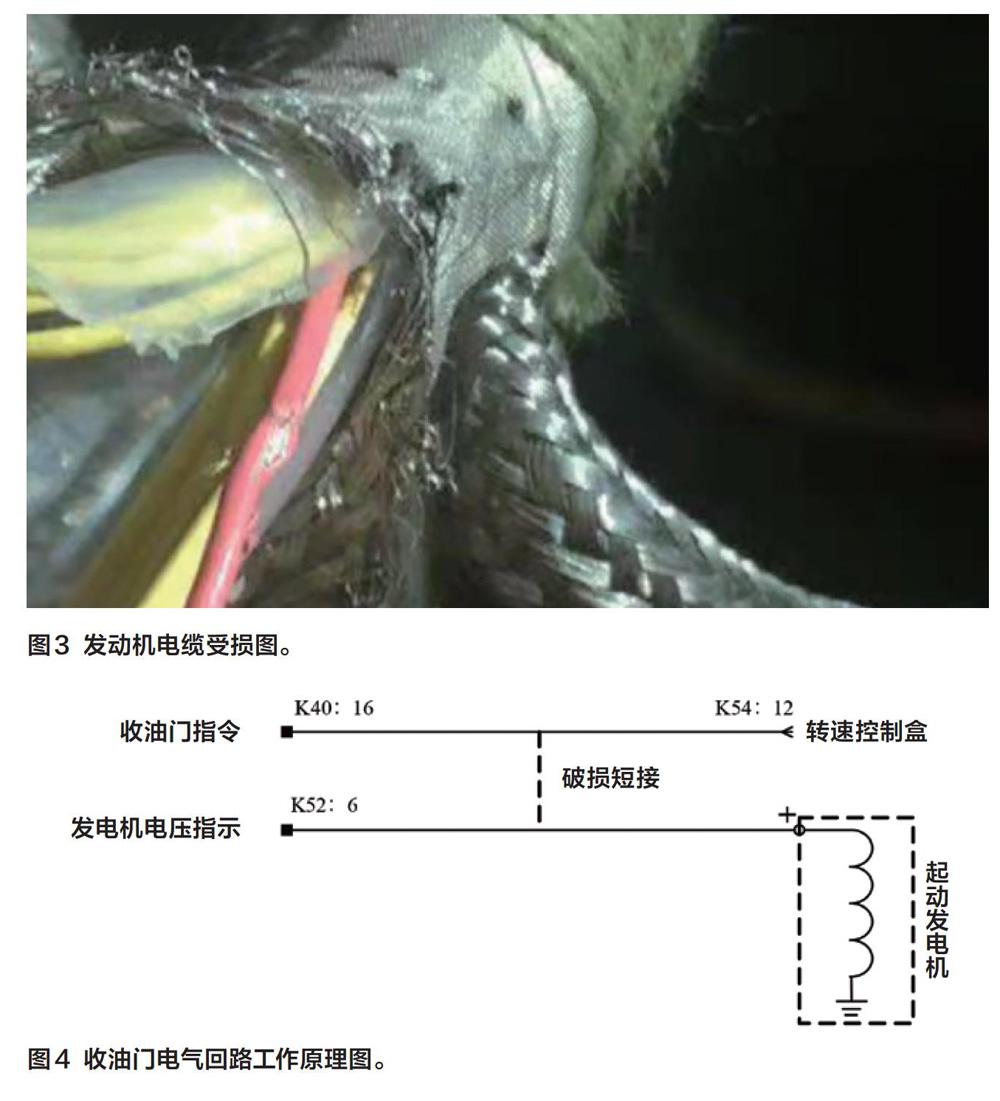
分解发动机电缆与K40和K54接插件,发现两根电线破损并接触,另外有两根导线绝缘层有损坏但导线未外露,损坏情况如图3所示。
因此本次故障可定位为,由于发动机电缆短路引起飞控计算机收油门输出回路损坏。
机理分析
两根破损的电缆线分别是收油门指令K40:6黄色线、发电机电压指示线QF:+红色线。
飞控计算机收油门指令经黄色线传至与其相接触的发电机电压指示线红色线,而红色导线取自起动发动机的输出端QF:+,起动发电机的内阻很小,小于1Ω,从而使飞控计算机收油门指令输出回路的电流增大几十安培,导致飞控计算机收油门回路损坏。工作原理见图4。
采取措施及验证
(1)更换发动机电缆。
对已破损的发动机电缆进行更换,进行整机电缆导通、绝缘性测试、电气单元测试、综合测试和发动机地面试车测试验证。工作正常。
(2)飞控计算机维修。
经检查,飞控计算机故障定位在信号接口板收油門通道固态继电器因短路而受损失效,更换继电器后,对飞控计算机做了振动、冲击试验,结合整机系统联试,进行综合测试和发动机地面试车等测试验证,工作正常。
通过采取以上两项措施,维修后的无人机在后续地面测试中所有设备均工作正常,各项技术指标符合要求,性能稳定,未出现油门工作异常情况,并顺利完成飞行任务。
猜你喜欢
动漫界·幼教365(中班)(2022年1期)2022-01-13
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
农家科技(2016年7期)2016-10-20
作文大王·笑话大王(2016年6期)2016-06-22
汽车之友(2016年10期)2016-05-16
作文大王·笑话大王(2016年4期)2016-04-27
作文大王·笑话大王(2016年3期)2016-03-11
作文大王·笑话大王(2016年1期)2016-02-24
中华少年(2009年9期)2009-09-14
