土石材料振动压实模型综述
2020-10-12 02:45李庆斌张兆省刘天云皇甫泽华张庆龙马卫民历从实安再展
人民黄河 2020年3期
李庆斌 张兆省 刘天云 皇甫泽华 张庆龙 马卫民 历从实 安再展
編者按:前坪水库位于淮河流域沙颍河支流北汝河上游、河南省洛阳市汝阳县,是国务院确定的172项重大水利工程之一。水库以防洪为主,结合供水、灌溉,兼顾发电等综合利用。水库主坝为黏土心墙砂(卵)砾石坝,主坝顶长818 m,最大坝高90.3 m。随着大坝建设进入以智能化为显著特点的4.0时代,土石坝建设也正处于从信息化向智能化转型的阶段。土石料碾压是土石坝建设中最重要的环节,压实质量对大坝安全有直接影响。传统施工方案存在碾压作业受人为因素影响大、压实质量不能在线监测和施工进度难以有效控制等问题。为克服土石坝传统施工方法的不足,探索土石坝建设4.0模式,实现“建设优质工程,打造美丽前坪”的工程建设目标,树立土石坝智能建造新标杆,前坪水库建设管理局与清华大学合作,开展了无人驾驶碾压技术、压实质量连续监测技术和压实过程动态优化等研究,取得了多项工程创新和突破,成功应用于前坪水库土石坝建设中,成果被鉴定认为“达到了国际领先水平”。为了总结前坪水库智能化建设的经验,为从事土石方压实工程的设计、科研、施工、建设管理工作者提供借鉴,本刊约请清华大学和前坪水库建设管理局相关研究人员,从土石材料振动压实模型、振动碾压机-土动力系统和压实质量连续监测等方面撰写了若干篇论文,在《人民黄河》陆续发表,以飨读者。
摘 要:振动压实模型可用于分析振动碾压机与土体相互作用,理解振动压实机理。介绍了振动压实模型发展现状,根据模型特点进行分类并选取一些代表性的模型进行介绍。振动压实模型包括黏弹性模型与黏弹塑性模型,其中黏弹性模型包括线弹性模型和非线性弹性模型,黏弹塑性模型包括不对称滞回模型和包含塑性原件的黏弹塑性模型。通过对模型特点的介绍,指出了现有模型的优点和存在的不足,并提出振动压实模型应当合理考虑土体变形的黏弹塑性性质和碾压机行走的影响,为压实质量连续监测和压实过程优化提供理论基础。
关键词:振动压实;动力学模型;黏弹性;黏弹塑性
中图分类号:TV523 文献标志码:A
doi:10.3969/j.issn.1000-1379.2020.03.021
Review of Vibration Compaction Model of Soil and Rock Materials
LI Qingbin1, ZHANG Zhaosheng2, LIU Tianyun1, HUANGFU Zehua2, ZHANG Qinglong1, MA Weimin3, LI Congshi2, AN Zaizhan1
(1.State Key Laboratory of Hydroscience and Engineering, Tsinghua University, Beijing 100084, China;
2.Qianping Reservoir Construction and Management Administration, Zhengzhou 450003, China;
3.Henan Water Conservancy First Engineering Bureau, Zhengzhou 450000, China)
Abstract:The vibration compaction model can be used to analyze the interaction between vibratory roller and soil and to understand the mechanism of vibration compaction. This paper introduced the development of vibration compaction model. The models were classified according to the characteristics and some representative models were selected to be introduced. Vibration compaction model included viscoelastic model and viscoelastic-plastic model. The viscoelastic model included linear elastic model and nonlinear elastic model. The viscoelastic-plastic model included asymmetric hysteretic model and the models containing viscoelastic-plastic elements. Through the introduction of the characteristics of the model, the advantages and disadvantages of the existing models were pointed out. The vibration compaction model should reasonably consider the viscoelastic-plastic properties of soil deformation and the influence of roller driving, so as to provide theoretical basis for the continuous monitoring of compaction quality and the optimization of compaction process.
Key words: vibration compaction; dynamic model; viscoelasticity; viscoelastic-plastic
振动压实广泛应用于公路、铁路、机场和水利工程等各种土石方工程中。振动碾压机通过施加静压力和激振力,使土石材料产生压缩变形,孔隙率减小,密实度增大,从而增强土石料抵抗外力变形的能力及防渗性、稳定性等性能。
振动压实技术应用于工程建设中,保障压实质量与提高压实效率成为研究重点。在过去几十年间,一些新的振动压实技术相继被提出和使用,如连续压实技术(CCC)[1-2]、实时监控技术[3-4]、无人驾驶碾压技术[5-6]等,目前振动压实正朝着智能化方向发展,智能压实技术[7-9]成为研究前沿与热点。
技术的发展需要理论作为支撑,对振动压实理论的深入研究是智能压实技术实现的基础。一些学者通过振动压实试验发现压实效果与碾压机工作参数相关,如哈尔胡塔[10]总结大量试验,发现压实效果与振动器的质量、激振力、振幅、振动频率和振动时间有关。为深入理解振动压实机理,国内外学者对振动碾压机-土系统进行了研究,建立了振动压实模型以分析不同压实参数对振动碾压机-土系统动力特征和压实效果的影响,为压实质量连续监测和压实参数优化提供理论依据。
本文对国内外振动压實模型的发展状况进行述评,介绍了一些代表性的模型,总结了目前振动压实模型存在的优缺点,提出了为适应压实技术智能化发展的振动压实模型应具备的功能。
1 黏弹性振动压实模型
1.1 线性弹性模型
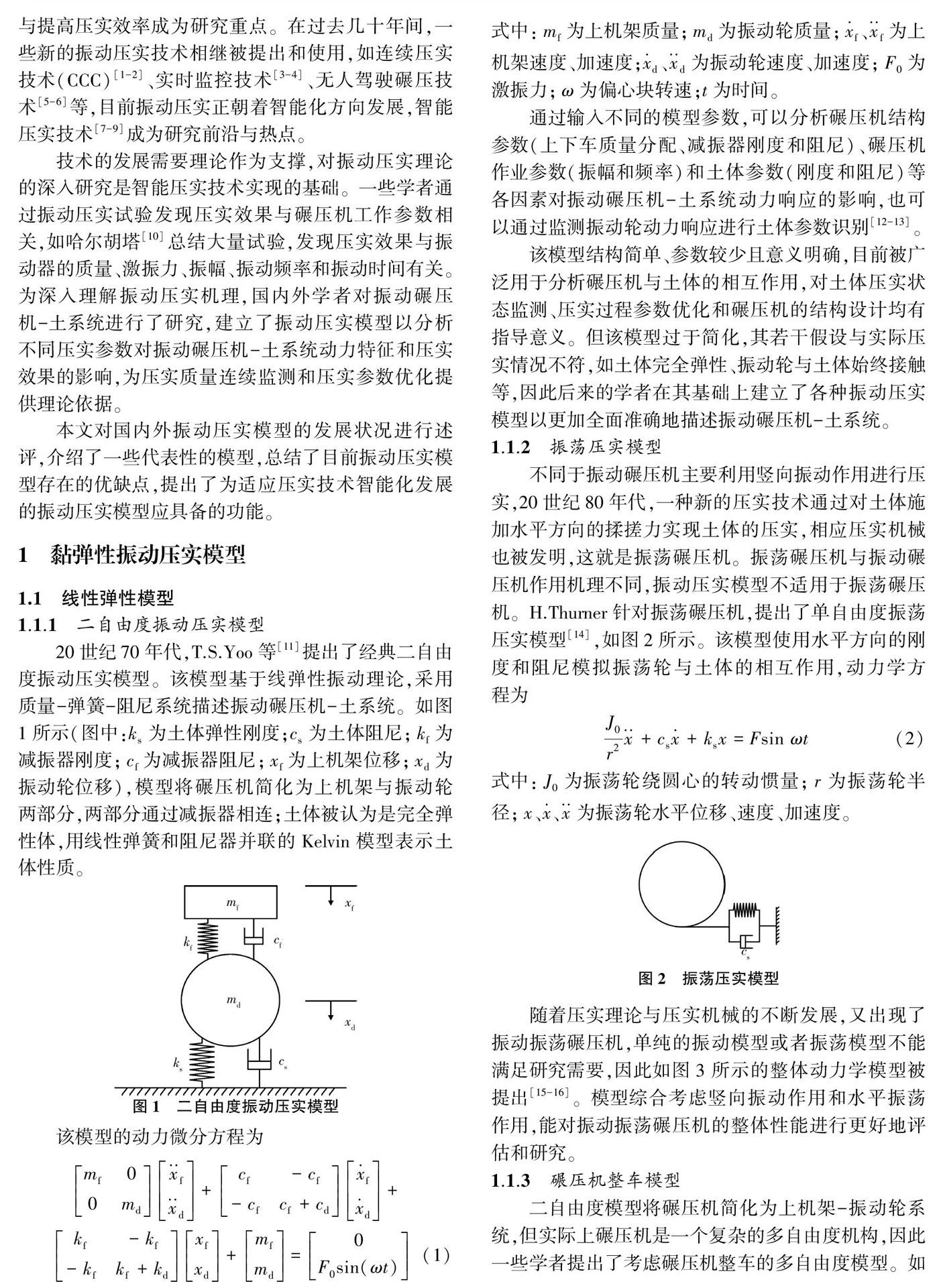
1.1.1 二自由度振动压实模型
20世纪70年代,T.S.Yoo等[11]提出了经典二自由度振动压实模型。该模型基于线弹性振动理论,采用质量-弹簧-阻尼系统描述振动碾压机-土系统。如图1所示(图中:ks为土体弹性刚度;cs为土体阻尼;kf为减振器刚度;cf为减振器阻尼;xf为上机架位移;xd为振动轮位移),模型将碾压机简化为上机架与振动轮两部分,两部分通过减振器相连;土体被认为是完全弹性体,用线性弹簧和阻尼器并联的Kelvin模型表示土体性质。
该模型的动力微分方程为
式中:mf为上机架质量;md为振动轮质量;x·f、x··f为上机架速度、加速度;x·d、x··d为振动轮速度、加速度;F0为激振力;ω为偏心块转速;t为时间。
通过输入不同的模型参数,可以分析碾压机结构参数(上下车质量分配、减振器刚度和阻尼)、碾压机作业参数(振幅和频率)和土体参数(刚度和阻尼)等各因素对振动碾压机-土系统动力响应的影响,也可以通过监测振动轮动力响应进行土体参数识别[12-13]。
该模型结构简单、参数较少且意义明确,目前被广泛用于分析碾压机与土体的相互作用,对土体压实状态监测、压实过程参数优化和碾压机的结构设计均有指导意义。但该模型过于简化,其若干假设与实际压实情况不符,如土体完全弹性、振动轮与土体始终接触等,因此后来的学者在其基础上建立了各种振动压实模型以更加全面准确地描述振动碾压机-土系统。
1.1.2 振荡压实模型
不同于振动碾压机主要利用竖向振动作用进行压实,20世纪80年代,一种新的压实技术通过对土体施加水平方向的揉搓力实现土体的压实,相应压实机械也被发明,这就是振荡碾压机。振荡碾压机与振动碾压机作用机理不同,振动压实模型不适用于振荡碾压机。H.Thurner针对振荡碾压机,提出了单自由度振荡压实模型[14],如图2所示。该模型使用水平方向的刚度和阻尼模拟振荡轮与土体的相互作用,动力学方程为
J0r2x··+csx·+ksx=Fsin ωt(2)
式中:J0为振荡轮绕圆心的转动惯量;r为振荡轮半径;x、x·、x··为振荡轮水平位移、速度、加速度。
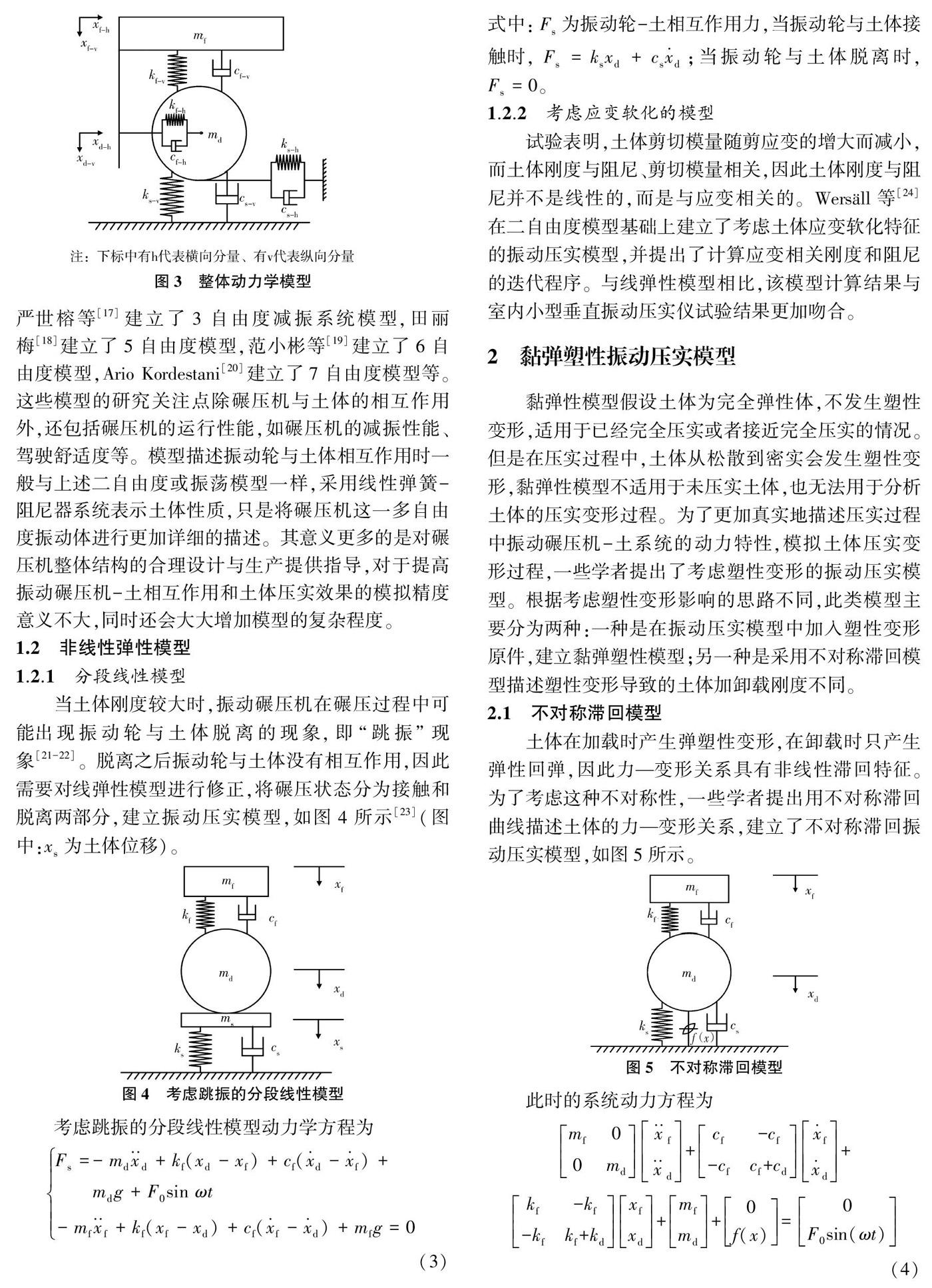
随着压实理论与压实机械的不断发展,又出现了振动振荡碾压机,单纯的振动模型或者振荡模型不能满足研究需要,因此如图3所示的整体动力学模型被提出[15-16]。模型综合考虑竖向振动作用和水平振荡作用,能对振动振荡碾压机的整体性能进行更好地评估和研究。
1.1.3 碾压机整车模型
二自由度模型将碾压机简化为上机架-振动轮系统,但实际上碾压机是一个复杂的多自由度机构,因此一些学者提出了考虑碾压机整车的多自由度模型。如严世榕等[17]建立了3自由度减振系统模型,田丽梅[18]建立了5自由度模型,范小彬等[19]建立了6自由度模型,Ario Kordestani[20]建立了7自由度模型等。这些模型的研究关注点除碾压机与土体的相互作用外,还包括碾压机的运行性能,如碾压机的减振性能、驾驶舒适度等。模型描述振动轮与土体相互作用时一般与上述二自由度或振荡模型一样,采用线性弹簧-阻尼器系统表示土体性质,只是将碾压机这一多自由度振动体进行更加详细的描述。其意义更多的是对碾压机整体结构的合理设计与生产提供指导,对于提高振动碾压机-土相互作用和土体压实效果的模拟精度意义不大,同时还会大大增加模型的复杂程度。
1.2 非线性弹性模型
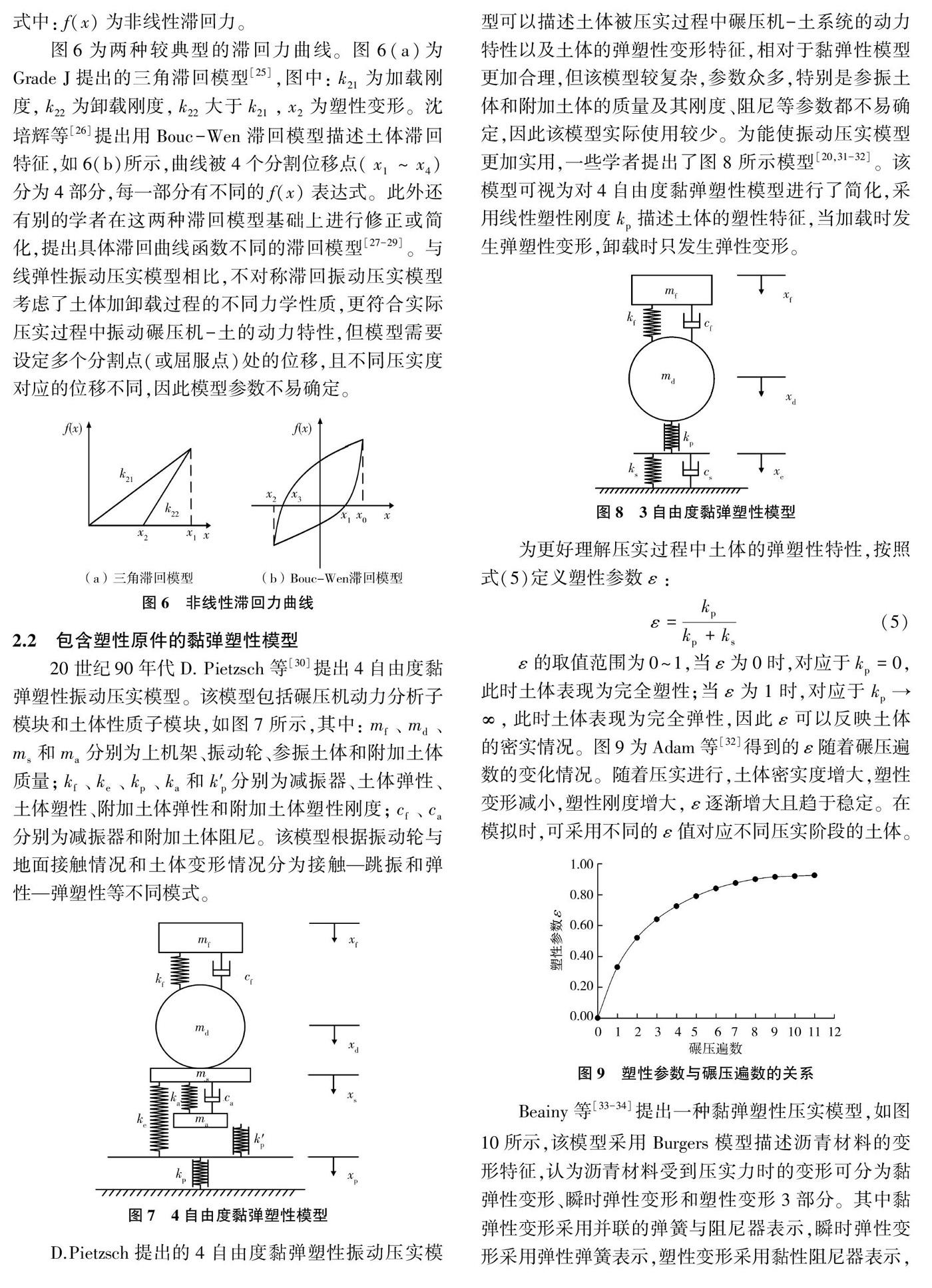
1.2.1 分段线性模型
当土体刚度较大时,振动碾压机在碾压过程中可能出现振动轮与土体脱离的现象,即“跳振”现象[21-22]。脱离之后振动轮与土体没有相互作用,因此需要对线弹性模型进行修正,将碾压状态分为接触和脱离两部分,建立振动压实模型,如图4所示[23](图中:xs为土体位移)。
考虑跳振的分段线性模型动力学方程为
式中:Fs为振动轮-土相互作用力,当振动轮与土体接触时,Fs=ksxd+csx·d;当振动轮与土体脱离时,Fs=0。
1.2.2 考虑应变软化的模型
试验表明,土体剪切模量随剪应变的增大而减小,而土体刚度与阻尼、剪切模量相关,因此土体刚度与阻尼并不是线性的,而是与应变相关的。Wersll等[24]在二自由度模型基础上建立了考虑土体应变软化特征的振动压实模型,并提出了计算应变相关刚度和阻尼的迭代程序。与线弹性模型相比,该模型计算结果与室内小型垂直振动压实仪试验结果更加吻合。
2 黏弹塑性振动压实模型
黏弹性模型假设土体为完全弹性体,不发生塑性变形,适用于已经完全压实或者接近完全压实的情况。但是在压实过程中,土体从松散到密实会发生塑性变形,黏弹性模型不适用于未压实土体,也无法用于分析土体的压实变形过程。为了更加真实地描述压实过程中振动碾压机-土系统的动力特性,模拟土体压实变形过程,一些学者提出了考虑塑性变形的振动压实模型。根据考虑塑性变形影响的思路不同,此类模型主要分为两种:一种是在振动压实模型中加入塑性变形原件,建立黏弹塑性模型;另一种是采用不对称滞回模型描述塑性变形导致的土体加卸载刚度不同。
2.1 不对称滞回模型
土体在加载时产生弹塑性变形,在卸载时只产生弹性回弹,因此力—变形关系具有非线性滞回特征。为了考虑这种不对称性,一些学者提出用不对称滞回曲线描述土体的力—变形关系,建立了不对称滞回振动压实模型,如图5所示。
此时的系统动力方程为
式中:f(x)为非线性滞回力。
图6为两种较典型的滞回力曲线。图6(a)为Grade J提出的三角滞回模型[25],图中:k21为加载刚度,k22为卸载刚度,k22大于k21,x2为塑性变形。沈培辉等[26]提出用Bouc-Wen滞回模型描述土体滞回特征,如6(b)所示,曲线被4个分割位移点(x1~x4)分为4部分,每一部分有不同的f(x)表达式。此外还有别的学者在这两种滞回模型基础上进行修正或简化,提出具体滞回曲线函数不同的滞回模型[27-29]。与线弹性振动压实模型相比,不对称滞回振动压实模型考虑了土体加卸载过程的不同力学性质,更符合实际压实过程中振动碾压机-土的动力特性,但模型需要设定多个分割点(或屈服点)处的位移,且不同压实度对应的位移不同,因此模型参数不易确定。
2.2 包含塑性原件的黏弹塑性模型
20世纪90年代D. Pietzsch等[30]提出4自由度黏弹塑性振动压实模型。该模型包括碾压机动力分析子模块和土体性质子模块,如图7所示,其中:mf、md、ms和ma分别为上机架、振动轮、参振土体和附加土体质量;kf、ke、kp、ka和k′p分别为减振器、土体弹性、土体塑性、附加土体弹性和附加土体塑性刚度;cf、ca分别为减振器和附加土体阻尼。该模型根据振动轮与地面接触情况和土体变形情况分为接触—跳振和弹性—弹塑性等不同模式。
D.Pietzsch提出的4自由度黏弹塑性振动压实模型可以描述土体被压实过程中碾压机-土系统的动力特性以及土体的弹塑性变形特征,相对于黏弹性模型更加合理,但该模型较复杂,参数众多,特别是参振土体和附加土体的质量及其刚度、阻尼等参数都不易确定,因此该模型实际使用较少。为能使振动压实模型更加实用,一些学者提出了图8所示模型[20,31-32]。该模型可视为对4自由度黏弹塑性模型进行了简化,采用线性塑性刚度kp描述土体的塑性特征,当加载时发生弹塑性变形,卸载时只发生弹性变形。
為更好理解压实过程中土体的弹塑性特性,按照式(5)定义塑性参数ε:
ε=kpkp+ks(5)
ε的取值范围为0~1,当ε为0时,对应于kp=0,此时土体表现为完全塑性;当ε为1时,对应于kp→∞,此时土体表现为完全弹性,因此ε可以反映土体的密实情况。图9为Adam等[32]得到的ε随着碾压遍数的变化情况。随着压实进行,土体密实度增大,塑性变形减小,塑性刚度增大,ε逐渐增大且趋于稳定。在模拟时,可采用不同的ε值对应不同压实阶段的土体。
Beainy等[33-34]提出一种黏弹塑性压实模型,如图10所示,该模型采用Burgers模型描述沥青材料的变形特征,认为沥青材料受到压实力时的变形可分为黏弹性变形、瞬时弹性变形和塑性变形3部分。其中黏弹性变形采用并联的弹簧与阻尼器表示,瞬时弹性变形采用弹性弹簧表示,塑性变形采用黏性阻尼器表示,模型各参数通过室内试验获得。
影响振动碾压机-土相互作用和压实效果的主要碾压参数有振幅、频率和车速等。以上考虑塑性变形的振动压实模型都没有考虑碾压机的行走,其模拟情况与图11(a)所示的静止加载相近:振动轮在原地振动,轮下土体随时间发展不断累积塑性变形。实际上碾压机在不断前进,如图11(b)所示,时刻有土体与振动轮脱离,又有新土体接触,振动轮作用于土体的力—位移关系与静止加载情况不同。此类模型主要分析振幅与频率对振动碾压机-土系统的动力反应和压实效果的影响,不能分析车速的影响。
为了模拟真实的振动压实过程,Imran[35]在黏弹塑性振动压实模型基础上,提出了黏弹塑性条块模型,如图12所示,模型将振动轮与沥青材料接触区域根据碾压机行驶方向分为后方条块、中心条块与前方条块3个,每一个条块内均为Burgers材料。模型假设振动轮始终与3个条块接触,振动轮-土相互作用力为3个条块作用力之和。
在此基础上,Imran提出了图13所示的考虑碾压机行走的振动压实模型[35]。路面被均匀分成若干条块,设振动轮与土的接触宽度为d,则每个条块宽度为d/3。在碾压机前进时,每个条块依次通过振动轮-土接触区域的前方、正下方和后方,每个阶段的时间由车速和轮接触宽度决定。条块变形按照这3个阶段,通过应变对时间的积分得到,每个阶段积分的初始条件是上一阶段的积分结果。该模型将振动轮经过某沥青条块的过程分为3个阶段,从而可以考虑碾压机行走对振动轮-土相互作用的影响和车速对压实效果的影响。该模型用于模拟碾压机与沥青路面的相互作用以及沥青的变形特征,与现场试验结果吻合较好,说明了该模型的有效性。
[5] ZHANG Q, LIU T, ZHANG Z, et al. Unmanned Rolling Compaction System for Rockfill Materials[J].Automation in Construction,2019,100:103-107.
[6] 张庆龙,刘天云,李庆斌,等.基于闭环反馈控制和RTK-GPS的自动碾压系统[J].水力发电学报,2018,37(5):151-160.
[7] ANDEREGG R, KAUFMANN K. Intelligent Compaction with Vibratory Rollers: Feedback Control Systems in Automatic Compaction and Compaction Control[J].Transportation Research Record,2004(1):124-134.
[8] KUMAR S A, ALDOURI R, NAZARIAN S, et al. Accelerated Assessment of Quality of Compacted Geomaterials with Intelligent Compaction Technology[J].Construction and Building Materials,2016,113:824-834.
[9] MOONEY M A. Intelligent Soil Compaction Systems[M].Washington, D.C.:Transportation Research Board,2010:67-76.
[10] 哈尔胡塔.压实土壤的理论及机械[M].北京:水利出版社,1957:125-145.
[11] YOO T S, SELIG E T. Dynamics of Vibratory Roller Compaction [J].Journal of the Geotechnical Engineering Division,1979,105(10):1211-1231.
[12] 张青哲.土基振动压实系统模型与参数研究[D].西安:长安大学,2010:43-45.
[13] 秦四成,程悅荪,李忠,等.振动压实下土壤基础密实程度在线监测研究[J].农业工程学报,2001,17(5):15-18.
[14] 龚涛.振动压路机动态特性分析及振动舒适性研究[D].湘潭:湘潭大学,2013:12-13.
[15] 郑书河,林述温.模式可调智能振动碾压机动力学特性建模分析[J].建筑机械,2012,9(2):398-403.
[16] 沈培辉,林述温.智能振动压实系统的整体动力学耦合分析[J].中国机械工程,2008,19(20):2395-2399.
[17] 严世榕,闻邦椿.振动压路机的一种非线性动力学特性研究[J].福州大学学报(自然科学版),2000,28(5):64-67.
[18] 田丽梅.振动振荡碾压机动力学分析及参数优化[D].西安:长安大学,2002:17-18.
[19] 范小彬,马伟,杜发荣,等.振动碾压机整机建模及工作参数优化[J].建筑机械化,2003,24(4):17-19.
[20] KORDESTANI A. Ride Vibration and Compaction Dynamics of Vibratory Soil Compactors[D].Quebec:Concordia University,2010:39-40.
[21] 辛丽丽,梁继辉,闻邦椿.振动轮跳振现象的振动碾压机系统的动力学特性分析[J].中国工程机械学报,2008,6(2):38-43.
[22] 何锃,张仲甫.振动碾压机跳振过程的数字仿真与机械和振动参数选取方法的研究[J].武汉理工大学学报(信息与管理工程版),1992,14(4): 9-17.
[23] MACHET J M, MOREL G. Vibratory Compaction of Bituminous Mixes in France[C]//Association of Asphalt Paving Technologists Proc.Washington, D.C.:Transportation Research Board,1977:326-340.
[24] WERSLL C, LARSSON S, BODARE A. Dynamic Response of Vertically Oscillating Foundations at Large Strain[C]//Computer Methods and Recent Advances in Geomechanics: Proceedings of the 14th International Conference of International Association for Computer Methods and Recent Advances in Geomechanics.London:Taylor & Francis Books Ltd.,2014:643-647.
[25] GRABE J. Continuous Invers Calculation of Soil Stiffness from the Dynamic Behavior of a Driving Vibratory Roller[J].Archive of Applied Mechanics,1993,63(7):472-478.
[26] SHEN P H, LIN S W. Mathematic Modeling and Characteristic Analysis for Dynamic System with Asymmetrical Hysteresis in Vibratory Compaction[J].Meccanica,2008,43(5):505-515.
[27] 管迪,陈乐生.分段线性不对称迟滞系统的稳态响应[J].机械强度,2009,31(2):182-185.
[28] 韩清凯,宫照民.考虑物料不对称滞回性质的振动压路机振动轮的动响应[J].振动与冲击,1998,17(1):1-4.
[29] 滕云楠,韩明.振动压实-土系统非线性滞回模型研究[J].真空,2016,53(4):61-64.
[30] PIETZSCH D, POPPY W. Simulation of Soil Compaction with Vibratory Rollers[J].Journal of Terramechanics,1992,29(6):585-597.
[31] THURNER H. Quality Assurance and Self Control in Road Construction, Advanced Measurement Technology[C]//Proceedings of the 4th International Symposium Infrastructure Construction Systems and Technologies. Munich: Bauma, 2001:73-81.
[32] ADAM D, KOPF F. Theoretical Analysis of Dynamically Loaded Soil[C]//European Workshop Compaction of Soils and Granular Materials. Paris: Presses Ponts et Chaussies,2000:207-220.
[33] BEAINY F, COMMURI S, ZAMAN M, et al. Viscoelastic-Plastic Model of Asphalt-Roller Interaction [J].International Journal of Geomechanics,2013,13(5):581-594.
[34] IMRAN S A, COMMURI S, ZAMAN M. A 2 Dimensional Dynamical Model of Asphalt-Roller Interaction During Vibratory Compaction[C]// 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO). Washington, D.C.: IEEE, 2015: 533-540.
[35] IMRAN S. Modeling and Analysis of the Interaction between Roller Drum and Pavement Material During Compaction[D].Norman:University of Oklahoma,2016:25-30.
[36] WERSLL C, NORDFELT I, LARSSON S. Soil Compaction by Vibratory Roller with Variable Frequency[J]. Géotechnique,2016, 67(3):272-278.
【責任编辑 张华岩】
收稿日期:2019-11-06
基金项目:河南省水利科技攻关计划项目(GG201704)
作者简介:李庆斌(1964—),男,河南太康人,教授,主要研究方向为大坝混凝土断裂损伤力学、高坝结构分析与智能建造
通信作者:安再展(1991—),男,江苏徐州人,博士研究生,研究方向为土石材料智能碾压技术
E-mail:azz14@mails.tsinghua.edu.cn