
增强现实技术在核电厂应用中的局限及解决方案
2020-10-12 12:06马玥竹
仪器仪表用户 2020年10期
马玥竹,桑 玮
(上海核工程研究设计院有限公司,上海 200233)
0 引言
目前,核电厂的就地运维和检修工作因为缺乏可将电厂参数、房间信息、通道信息、设备信息等重要信息呈现给运维人员的集成平台,导致核电厂存在人员误入危险区域,误入冗余通道的房间及误操作冗余通道设备等潜在风险。同时,就地运维人员通过一次侧表计的读数来对设备状态进行评估,其设备巡检及维修的效率也存在瓶颈。上述问题均可归结为就地维修人员对现场工作环境实时认知的缺失,为核电厂运维增加了一定的安全隐患。
增强现实技术(Augmented Reality,缩写AR)作为当前最先进的交互技术之一,可通过将虚拟和现实“无缝”集成的方式,一定程度上解决就地维修人员对现场工作环境的实时认知缺失问题。AR 结合了计算机图形图像技术、空间定位技术、可视化技术以及交互技术,可在展现真实物理环境信息的同时,将现实世界难以实现的辅助虚拟数据信息,通过增强现实设备叠加显示在真实物理环境中,使真实和虚拟两种信息相互补充、叠加,具有实时交互性。该AR 技术可通过将运维人员所需的重要信息,通过增强现实设备叠加展现在数据相关设备周边的方式,支持运行人员对设备的监测、调试和检修活动,增强工作人员对电厂状态、设备状态、维修步骤及安保防护等方面的认知,提升核电厂安全、可靠及经济性,有必要将增强现实技术与电厂运维紧密结合。
AR 技术于20 世纪60 年代[1]提出以来,经过长时间的技术发展及积累,已成功在商业、医学、教育及工业领域得到使用。由于核电厂安全冗余设备数量大、系统复杂、系统间关联紧密等原因,引入AR 技术尚存在一些局限,本文将介绍核电厂AR 技术应用的局限及解决方案。
1 AR技术的工作原理
AR 技术是将计算机产生的虚拟物体或其他信息合成到用户感知的真实世界中的一种交互式的可视化技术,它是对真实世界的补充[2]。
AR 技术的原理是通过摄像机识别现实场景中的物体后,利用空间注册技术计算虚拟信息在基于现实场景的坐标系中的位置后,将虚拟信息通过AR 组件(如AR 眼镜、移动手机或平板电脑等设备)显示在真实场景中。
AR 技术工作原理分为四步[3]:
1)场景信息获取:对需要增强现实的场景进行扫描,识别场景中的重要物项,建立真实场景坐标系,为跟踪注册技术的实施提供所需场景信息。
2)空间定位及注册:通过计算机虚拟世界与真实场景坐标系的对应关系,将虚拟信息按照正确的空间透视关系叠加到真实场景的准确位置,并确保用户移动不会造成虚拟信息的抖动与扭曲。
3)场景融合绘制:根据真实场景三维信息绘制虚拟信息,将真实场景与虚拟信息进行融合,确保虚拟信息稳定显示。
4)增强信息显示:将虚拟信息在AR 组件设备上进行显示。
2 AR技术在核电厂应用中的局限
核电厂就地环境的一些特殊性影响着AR 技术在核电厂的应用,主要影响AR 技术中的场景信息获取与空间定位及注册。AR 技术在核电厂应用中的主要局限有下述几点。
2.1 网络信号屏蔽
目前市场上已投入商用的AR 设备均需连接网络,通过网络实时进行设备定位,达到需增强显示的模型或数据可通过AR 设备持续稳定显示,不出现抖动或遮挡现象。而核电厂就地环境由于以下3 点原因,很难部署全范围覆盖的网络且保证网络信号良好:
1)就地环境较宽阔,需部署多个网络基站。
2)特殊钢筋水泥造成的网络信号削弱及屏蔽。
3)大量冗余设备及辐射造成的电磁兼容性会造成大量信号噪音。
在无法连接网络信号的情况下,AR 设备无法做到精确的设备定位。
2.2 大量冗余设备
核电厂为确保其安全性,保证任何工况下电厂均能安全运行,故设置了大量的冗余房间、冗余通道、冗余设备。这些房间、通道、设备在外观上的一致性,导致AR 设备很难通过常用的基于自然特征的跟踪注册方法,实现设备识别及空间跟踪注册。
2.3 数据来源复杂
核电厂的电厂参数作为决策过程中最重要的参考,在完成电厂各项任务中均需灵活调用。但核电厂考虑到其安全性,电厂参数不仅数据量庞大且数据来源于不同系统,在执行任务过程中存在需从不同系统中调用数据的情况。数据来源复杂导致AR 设备无法进行所有电厂参数的实时传输及存储。
3 AR技术在核电厂应用中的解决方案
3.1 设备识别解决方案
上述2.1 及2.2 中描述的AR 技术在核电厂应用中的局限均导致设备识别困难,其原因为在核电厂中空间定位和空间注册相对困难。
AR 技术中最重要的技术即为空间定位与空间注册技术。空间定位是数字化映射的基础,通过定位,可将相关虚拟信息精准叠加到真实环境中所需位置,而不会出现虚拟信息显示错位的情况。而空间注册,可将计算机生成的虚拟物体和真实环境中的景象“对齐”。空间注册需确定虚拟物体与用户间的关系,通过正确的几何投影将虚拟物投影到用户视野中。空间注册目前较为先进及稳定的方法是基于同步定位与地图重建的方法,而空间定位技术则存在许多方案及提升空间。
目前,市场上增强现实设备使用的空间定位往往通过GPS 定位系统或通过Wi-Fi 或UWB 定位基站的方式进行空间定位,但考虑到核电厂的特殊环境及安全性要求,上述两种空间定位方式均不可直接应用于核电厂厂内定位,其原因如下:
1)GPS 定位系统:GPS 定位系统由于误差在几十米左右,很难运用于电厂环境中,因为几十米的定位误差很容易定位错房间或厂房,使得人员定位系统无法发挥其作用。
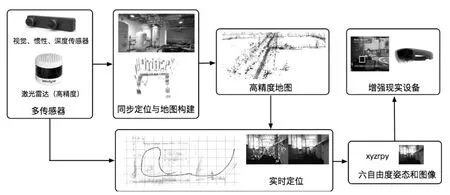
图1 离线室内定位及注册系统架构Fig.1 Off line indoor space position and registration system architecture
2)通过Wi-Fi 或UWB 定位基站进行定位:精准的人员定位系统需要较好的网络环境,需要在整个厂区中安置大量Wi-Fi 或UWB 定位终端或设备。然而,核电厂由于存在信号屏蔽和电磁兼容性等问题,无法确保在厂区所有位置的全覆盖,并提供长期和持续良好的网络环境。即便要实现也需要投入大量的设备成本,这一致命问题导致常用的精准定位系统无法在核电厂使用。
综上所述,目前市场上尚缺乏满足核电厂内特殊环境的室内定位方法和技术,在达到高精度的同时,集中解决定位系统的稳定性与鲁棒性。
离线室内定位及注册系统的搭建可满足在核电厂特殊环境中达到定位及注册的高精度、高稳定性及高鲁棒性的目标,通过对于核电厂目标厂房内的空间扫描地图构建,获取视觉相机在厂房内的坐标信息,提供给AR 设备进行后期的空间注册功能。
离线室内定位及注册系统的原理如图1 所示。该系统通过多传感器融合的空间扫描和空间定位组件处理视觉与惯性接连数据,实时提供支持AR 设备空间定位及空间注册的六自由度姿态定位信息并通过一次扫描离线生成可视化稀疏点云,通过UDP 的通讯方式输出给AR 设备端。在AR 设备就地应用中,空间定位设备利用基于视觉的同步定位与地图重建技术,同时参考预先由点云和三维模型对比建立的离线地图获取实时的位置信息,AR 设备参考当前所在位置,向数据服务器请求周边的相关模型数据以及实时数据点。最终,AR 设备将展现包含静态设备信息以及实时动态数据在现场的混合叠加视野。
该定位系统将定位设备与AR 的灵活性、便携性与易操作性融入解决方案,提供一套基于分析环境不确定性、精确建模和多传感器融合的室内空间定位系统,仅需在首次使用前对整个场景进行扫描建立点云模型即可,不依赖于无线网络,无需在厂内增加Wi-Fi 或UWB 定位基站。
3.2 数据交互解决方案
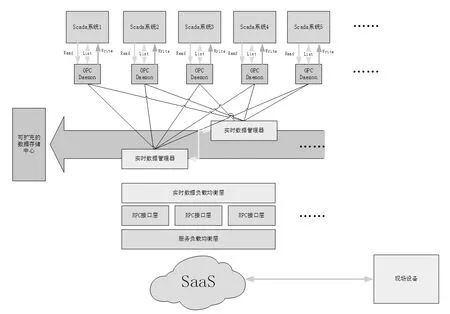
图2 OPC通信过程Fig.2 OPC Communication process
为解决上述2.3 中描述的数据来源接口不一致的问题,可采用OPC(Object Linking and Embedding for Process Control)通讯的方式。OPC 是一套集信息模型定义,服务集与通讯标准为一体的标准化技术框架。同时,随着《OPC统一框架》国家标准的发布,OPC 也成为了“工业4.0”实现标准化的基石,选择OPC 统一数据接口符合国家标准。AR 设备可通过OPC 通讯的方式与核电厂内来自各个不同系统的实时数据、历史数据进行传输及交互。
核电厂的仪控设备或仿真仪控设备,通过OPC DA3.0接口提供实时数据点,通过以下手段将数据综合到一起并提供云端的实时数据服务,OPC 通信过程如图2 所示。
首先,在各个实时数据来源系统中部署OPC 执行服务(OPC Daemon),该服务只用来执行最终OPC 读写查操作。对于数据点的订阅,使用组播方式发放给数据管理器,实时数据管理器负责与各个OPC 执行端建立数据连接,按照用户请求进行按需数据查询以及周期性数据查询,执行数据点清单的定期更新,建立历史数据缓存机制。为了提供高可用性,实时数据管理器可以建立高可用性集群,所有集群公用一个可扩展的额存储中心,通过离散数据索引,保证数据缓存的完整性。实时数据的历史数据使用RPC 方式对外提供服务。服务层面使用轮询或者其他动态负载均衡手段暴露出访问接口(HTTPS),通过建立SaaS 服务部署模式,提供给AR 设备进行数据访问。
在数据处理方面,PDS 数据先被展开成多个设备,而后按照用户定制的绑定规则自动或者由用户手动将实时数据点绑定到设备上,使得实时数据点与设备建立多对多关系。当用户从现场的设备中获取有效的定位信息,利用定位信息查询到设备模型后,将自动查询设备模型的绑定数据点。通过联动实时数据服务,数据点的实时数据、历史数据开放给现场设备的信息显示端。
4 结束语
随着AR 技术硬件的快速发展,AR 设备将具有更强的便携性与续航能力。同时,随着AR 技术软件的快速发展,虚拟信息将趋于真实,提高虚拟信息的真实感及沉浸感。AR 技术可以辅助核电厂使庞大数据打破空间限制,随时随地进行显示及交互。
本文中提出基于现有技术能力且针对核电厂就地环境的离线室内空间定位和注册方案及针对核电厂来源复杂的数据交互方案,可推进AR 技术在核电厂中的应用,同时应继续关注与研究更高效的技术和方案,提升AR 技术在核电行业的实用性。
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
核安全(2022年2期)2022-05-05
中国特种设备安全(2022年1期)2022-04-26
大科技·百科新说(2021年1期)2021-03-29
导航定位与授时(2020年5期)2020-09-23
动漫界·幼教365(中班)(2020年8期)2020-06-29
中国核电(2020年2期)2020-06-24
铁道通信信号(2020年9期)2020-02-06
知识经济·中国直销(2018年3期)2018-04-12
中国核电(2017年1期)2017-05-17
