
时频基准系统的框架设计与技术实现∗
2020-10-10 02:44:18
舰船电子工程 2020年8期
(92941部队 葫芦岛 125001)
1 引言
时频基准系统是舰船信息平台的重要需求之一,是作为信息化战争中实现战场态势感知共享的前提条件,在舰载作战系统、编队指挥系统中发挥着日益重要的作用,已成为信息化战争中的重要保障设备[1]。现有时频基准系统存在诸多不足,如用户接口类型复杂、技术体制不统一、传输距离受限、设备冗余度不高,以及不具备信号远程监控能力等,尤其在海上信息移动平台更为突出,这些都大大影响了平台整体性能的发挥[2]。文献[3~5]研究了分布式系统的时间统一技术,用于解决多平台之间时间同步问题。文献[6~8]利用多种时间源实现组合授时,提升了授时精度和系统可靠性。在技术应用方面,文献[9]采用MCU+FPGA方式,以较低成本实现了高精度授时系统;文献[10]基于VC++编程技术,实现了可用于训练目的的时频单元模拟软件;文献[11]利用GPS和北斗实现了双机授时,提升了授时系统可靠性。文献[12]研究了海面舰船时间统一方法,对影响舰载微波双向时间传递的误差因素进行了理论分析和计算。
基于对已有技术分析并结合实际需求,本文提出一种海上信息平台时频基准系统设计思路和技术总体框架,并对系统关键技术进行研究,为实现海上舰船时频基准系统提供技术支撑。
2 系统架构及功能设计
时频基准系统由时频主机和时频分机组成,通过主、分机级联实现分布式时频分发服务,并通过主机实现主、分机的集中控制。时频基准系统架构如图1所示,主要采用基于动态配置的主从架构,由主机完成定时、守时、人机交互等功能,由分机完成分布式时频分配或配送功能,主、分机两类设备共同组成一个完整的时频基准系统。系统通过主、分机级联实现分布式时频分发服务,并通过主机实现主、分机的集中控制管理。主机通过光纤链路与分机组成时频系统级联环路,将与外部时间源同步后的时间信息在光纤环路内共享传输。分机从级联环路获取时间信息,将本地时间和频率与主机同步后,输出标准时间和频率信息至用时/用频设备。环路内设备级联数量不受限,主、分机可根据用时/用频设备规模和安装位置要求按需配置,并就近级联接入光纤环路;环形链路形成传输通道的冗余备份,光纤或主、分机单点故障时,仍可完成时间同步和信息分发。
时频基准系统软件部分主要包括时频信息处理软件和显控软件,软件功能组成图如图2所示。时频信息处理软件由短波处理单元、频控处理单元、铷钟处理单元、断电处理单元、频标处理单元、时标处理单元和光纤通信处理单元等7个单元构成,实现时间源信息处理、频标驯服、时间同步和信号生成、频标信号生成等功能;显控软件由主控处理单元、前面板显示单元和光纤通信处理单元等3个单元构成,实现时间、频率信息和主分机状态的实时显示和设备运行模式、工作参数的切换操作以及记录设备工作日志等功能。
设备加电启动后,显控软件通过与时频信息处理软件各单元的信息交互,对外部时间源设备联通情况和内部关键模块工作状态进行自检,当外部时间源输入正常时,设备自动进入同步模式,与外部时间源实现精确同步后,将时间、频率信息分发给各用时设备。显控软件可实时接收用户通过人机交互界面,选择手动或自动工作方式,切换运行模式:同步/守时,及同步时间源。显控软件采用Linux操作系统,实现时间、频率信息和主分机状态的实时显示和设备运行模式、工作参数的切换操作以及设备工作日志。
3 系统关键技术实现
3.1 系统容错技术实现
在组网方式上,由于光纤链路不仅需要传递时间同步信号,还需要传输通信/控制信号;不仅需要考虑到正常连接情况,还需要根据应用考虑节点被摧毁或临时增加节点等网络拓扑变更情况,具体结构如图3所示。在正常连接情况下,时间同步信号流和通信/控制信息流是按环网单向流动遍历所有节点。

图1 系统架构图
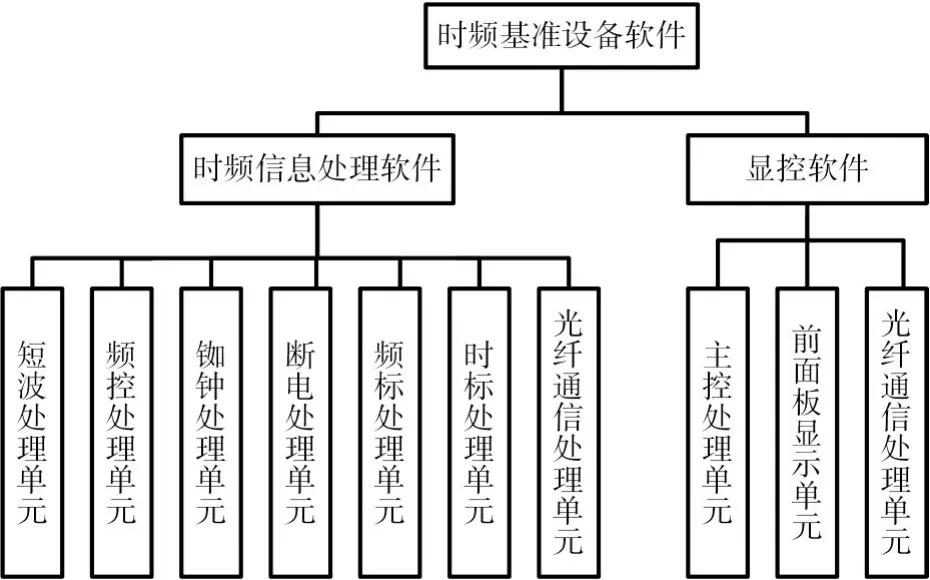
图2 系统软件功能组成图
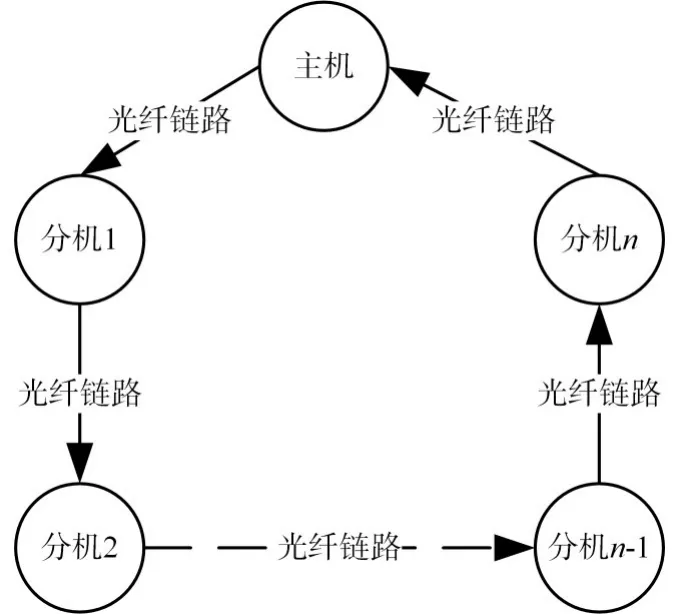
图3 正常情况下光纤环网中的单向结构
当网络中节点被摧毁或设备故障时,将导致单向环网链路中断,则网络能够自适应重新建立连接。重新建立连接后时间流和信息流如图4所示,时间流仍然从主机出发向分机分配,由环网结构变为树状结构,信息流由一个环网裂变为双环网结构,从而保障系统在某些节点功能失效时仍然能够正常工作。此外,系统能够动态适应拓扑结构变化,如图5所示,当在网络中增加一个分机时,网络拓扑会重新建立连接重新组成单环网结构,从而保障系统工作进程能够不受影响。

图4 光纤环网中断情况下时间信号流与信息流
3.2 原子钟频率跳变完好性监测技术实现
频率跳变对系统正常工作的影响是巨大的,会导致参照时频基准的装备数据与时间关联出现错误。原子钟异常现象中最常见的是频率跳变。频率跳变通常又分为两种情况。第一种是暂时性跳变(图6所示),即原子钟输出频率在某一时刻(时刻23和54)发生跳变,但是下一时刻或经历很短的时间之后能够回归到正常频率输出。另外一种频率跳变可称之为持久性跳变(图7所示),即发生频率跳变异常之后不能回归到正常频率输出。
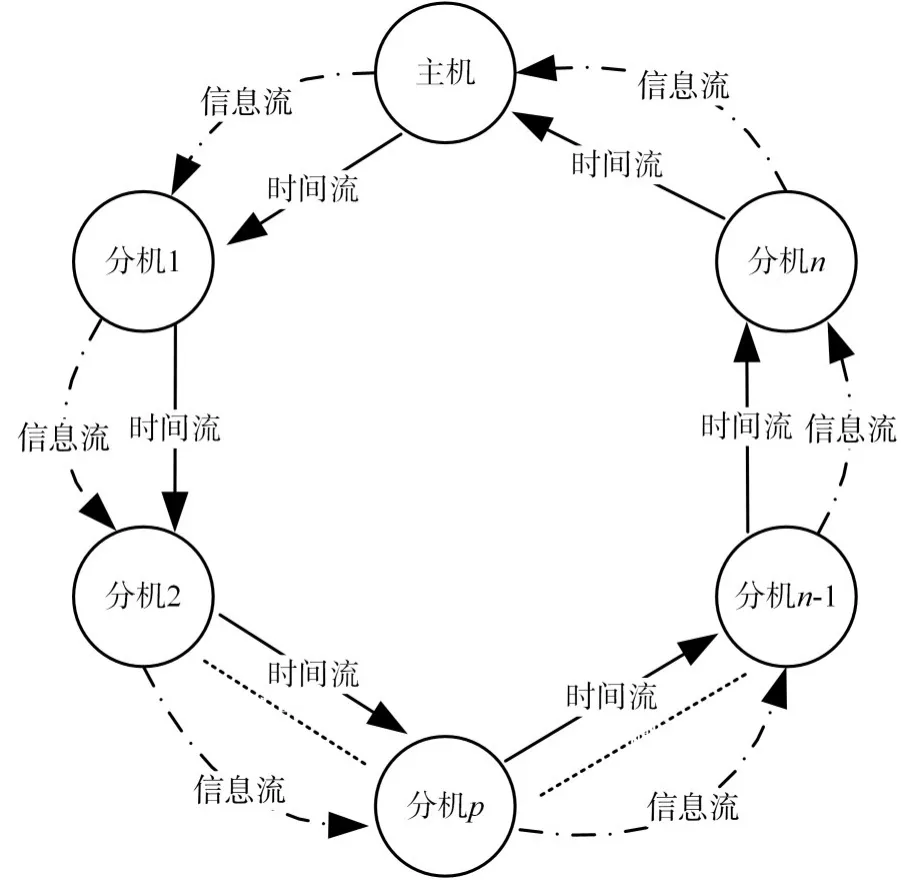
图5 光纤环网增补节点情况下时间信号流与信息流
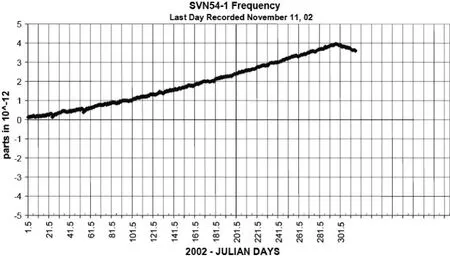
图6 GPS Block IIR(SVN54-1)星载原子钟频率暂时性跳变
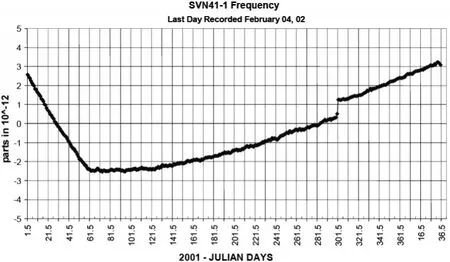
图7 GPS Block IIR(SVN41-1)星载原子钟频率持久性跳变
考虑到本系统中主机设备中只有主备两台工作铷原子钟,因此采用一种基于中间振荡器的时频主备链路自主完好性监测方法,其基本架构如图8所示。具体实现如下:
1)在主机系统中采用恒温晶振作为中间振荡器,选取主备链路实时比对测量数据作为其完好性监测的观测量,实施时频链路自主完好性监测确保了异常告警的及时性。
2)硬件构架简单。在正弦差拍数字化星上时频主备链路比对测量系统基本构架的基础上,不增添任何硬件电路,仅在数字信号处理模块中增加相应算法进行完好性监测。
3)借助于中间振荡器解决异常归属判断模糊性问题。具体实现方法是实时测量主备链路之间的频率差,并以此为观测量运行异常检测算法判断时频链路异常是否发生,然后分别分析主用链路和备用链路与中间振荡器的比对测量数据,进一步判断主用链路异常、备用链路异常或中间振荡器故障,解决异常归属判断模糊性问题。

图8 基于中间振荡器的时频自主完好性监测
3.3 多时间源无缝切换技术实现
为了保证时频基准的可靠性,时频系统一般均配备了备份主钟系统。当主钟性能下降或信号出现异常时,及时切换到备份钟,以保证时频信号的连续、稳定。以目前全球四大导航系统为例(美国的GPS系统、俄罗斯的GLONASS系统、欧洲的伽利略系统和中国的北斗卫星导航系统),其导航卫星上的星载原子钟组一般配备3~4台原子钟,对工作中的主钟采取冗余设计,以保证卫星时间频率信号的稳定连续性。常用主备钟无缝切换方法核心思想是在切换前实现主备钟之间的相位同步,利用时间间隔计数器测得主备钟之间的相位差,并通过相位微调仪对备份钟进行频率调整,实现主备钟间的实时相位同步。
综上分析,系统采用图9所示切换方案,通过双混频时差测量系统进行相位测量,以保证较高的相位测量精度,同时可以检测主钟和备份钟的频率稳定度。相位和频率调整使用直接在鉴相器结果上进行补偿的方法,而不使用移相器以避免移相器对结果带来的不确定性。为减小主备钟切换前后的相位跳变,使用两个基于双混频时差法的鉴相器,采用“软切换”的方式进行主备钟切换,保障切换过程不影响系统向外持续提供时频基准,从而实现无缝切换过程。
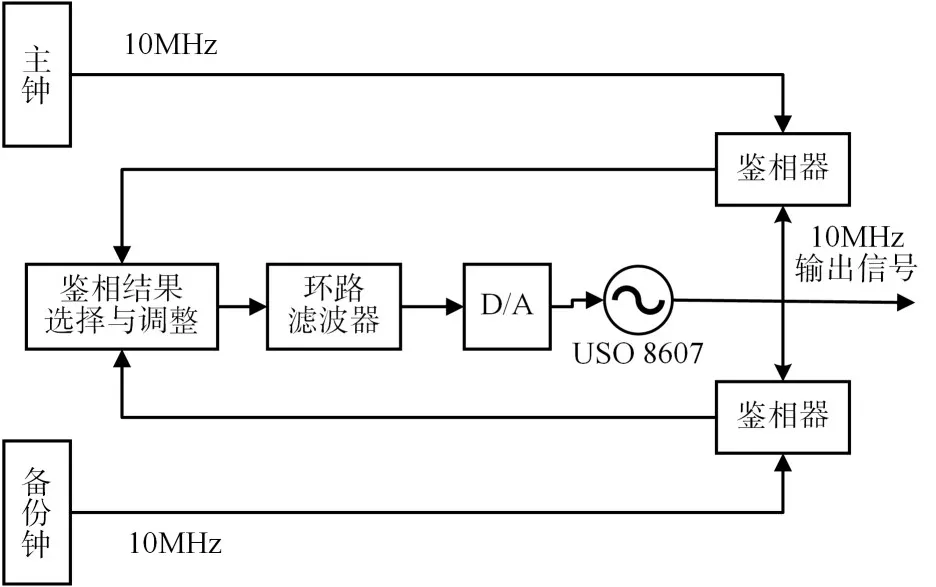
图9 系统无缝切换方案
3.4 时间频率信息光纤传递技术实现
系统中主机和分机组网采用光纤模式,利用高精度光纤时间同步方法将主机时间频率信号传递到分机,并形成环回网。光纤时间同步本地端补偿方案如图10所示,系统将外部输入的参考10MHz频率信号和1PPS(脉冲/秒)信号经过相位和延迟补偿模块,再经过编码模块对标准时间信号进行编码,同时也将外部输入的时码信息一同进行编码,然后将编码信号调制在激光器上经过光纤链路发出,在远程端经过解码再生模块恢复出10MHz频率信号、1PPS和时码信息;远程端将收到的光信号返回,在本地端解调恢复出来,作为控制相位和延迟模块的反馈信号,在本地端进行延迟和相位的补偿,从而实现本地端与远程端的时间和频率信号的同步。在远程端接收到的信号已经与本地端同步的,可直接使用而不需要进行处理。上述方法既能保证长距离的同步精度与近距离的相当,也能满足沿途站点的授时需求。

图10 本地端补偿方案结构图
在系统组网中采用环回中途下载方案,并延续双向同一波长环回比对方案,保证本地端与远程端的同步精度,中途采用双向光中继的方案,而沿途采用监听下载信号再生的方式,具体结构如图11所示。环回中途下载方案双向光的波长完全一致,对激光器要求低,各个沿途站点是以监听的方式工作的,因此各个沿途站点间互不干扰,且不存在累积误差。

图11 多用户方案结构图
4 结语
本文针对当前时频基准系统存在的不足,提出了一种新型时频基准系统架构和技术实现。对时频基准系统的架构和功能组成进行了详细设计,进一步研究了系统容错、频率跳变监测、源间无缝切换、时频信号光纤传递等系统关键技术实现,为海上信息平台时频基准系统研制提供了一种设计思路和实现手段。
猜你喜欢
净水技术(2022年1期)2022-01-13 00:45:28
科技资讯(2021年10期)2021-07-28 04:04:53
环境卫生工程(2021年3期)2021-07-21 05:34:36
科学与信息化(2021年6期)2021-01-04 08:40:53
广东通信技术(2020年7期)2020-08-13 06:01:42
电子制作(2018年23期)2018-12-26 01:01:02
铁道通信信号(2018年9期)2018-11-10 03:26:44
电子制作(2017年16期)2018-01-30 07:15:14
舰船科学技术(2015年8期)2015-02-27 15:38:48
电测与仪表(2014年17期)2014-04-04 11:56:48
