新安江水电站三维逆向建模的研究与应用
2020-10-09 06:43傅剑文朱克刚
水电站机电技术 2020年9期
傅剑文,朱克刚,胡 军
(国网新源水电有限公司新安江水力发电厂,浙江 杭州311608)
1 引言
随着能源互联网建设的发展,能源互联网数字化和智能化建设也越来越紧迫,水电站作为能源互联网组成部分,其数字化和智能化建设也随着技术的发展逐步推进。随着VR和AR等可视化技术的发展,三维数字化模型已经成为水电站数字化建设的重要载体,如何高效地建立水电站的三维数字化模型很关键,尤其是老水电站,建设时的技术条件并未实现数字化建设,并且水电站经过多年的运行改造,设备和管路布置变化较大,图纸资料也有部分缺失,因此要根据图纸资料建立电站完整的三维数字化模型难度较大。三维激光扫描技术是最近几年兴起的一项技术,该技术可以迅速和准确地采集地面物体的表面数据,不跟地面物体接触就能构建三维模型,该技术迅速成为采集空间数据的核心技术手段之一。三维激光扫描技术在变电站数字化设计[1]、古建筑保护[2]、数字城市建设[3]和景观建模[4]等方面有广泛的应用,因此三维激光扫描技术建模可作为老水电厂三维数字化建模的一种有效手段。本文尝试采用三维激光扫描技术对新安江水电站主厂房三维数字化进行逆向建模。
2 三维激光扫描建模步骤
三维激光扫描建模的主要工作步骤如图1,主要包括:①数据采集,通过三维激光扫描系统实地获取目标实体的点云数据、纹理信息;②数据处理,包括多站点数据配准、拼接、去噪、重采样等处理;③三维建模,根据不同的点云特征,建立三维空间数据模型;④纹理映射,纹理信息映射到模型上,形成模型的真实纹理[5]。

图1 三维激光扫描建模流程
3 主厂房三维激光扫描及三维逆向建模
3.1 扫描范围
新安江水电站总装机容量662.5MW,共9台混流式机组。主厂房总长度219m,宽度21m。本次主要对主厂房发电机层及水轮机层进行激光扫描,采集主厂房发电机层和水轮机层的结构及设备数据。其中发电机层主要设备包含发电机风罩、控制盘柜、桥式起重机、调速器压力油罐、回油箱、油泵及阀门管路等,水轮机层主要设备包含通风系统风管、滤水器、油气水阀门、油气水管路系统、电缆桥架等。
3.2 设备选择及站点设置
三维激光扫描建模效果的好坏跟扫描数据的采集质量有直接关系,采用Riegl VZ1000扫描仪作为数据采集设备。奥地利Riegl VZ1000高精度三维激光扫描仪具有数据采集精度高的特点,单次测量精度达6mm(100m处),扫描速度为30万点/s,数据采集精度高,扫描速度快。

图2 Riegl VZ1000高精度三维激光扫描仪
影响三维建模精度的另一个因素就是数据采集的完整性,为了能够全面地、完整地获取点云数据,并且得到精确的点云数据,扫描站布设遵循以下几个原则:
(1)扫描站点需要尽量避开遮挡物。
(2)相邻站点间距不能相隔甚远,需要保留20%~30%的重叠度。
(3)站点间距设置不宜过大,研究显示站点设置超过20m后,点云拼接精度就会降低[6]。因此,根据以上原则,本项目相邻扫描站点间距不超过20m,共设置扫描站点75站,其中发电机层35站,水轮机层40站。
3.3 数据处理
现场获取的各站离散的点云数据经过配准拼接后转换成统一坐标系下的连续的构筑物或设备点云轮廓。本文将点云数据统一转换成WGS84坐标系。张庆圆[7]认为点云拼接方法主要为标靶拼接、点云直接拼接以及控制点拼接3种方法。经过研究对比分析,因主厂房扫描数据具有较为明显的特征点,所以本文利用点云直接拼接,通过寻找重叠区域的同名点进行点云拼接。点云数据在三维扫描仪自带软件RiScanPro中进行数据处理与拼接,为提高拼接的效率与精度,拼接设置见图3,其中最近点搜索半径为0.5m,最近点最大倾斜角5°,第一次最小微调距离为0.1m,第二次最小微调距离0.05m,拼接精度为0.0086m。点云拼接模型的精度检查通过全站仪测量特征点和拼接后的坐标点进行对比,误差满足要求即可,如不满足需要手动或者自动重新设置拼接,直至满足要求。

图3 点云拼接参数设置
由于在现场采集数据过程中,厂房内有机组正在发电,振动较大,同时水电站环境比较复杂,扫描过程中有比较多的噪声点,因此先进行手动删除,然后再导入到RiScanPro软件进一步处理去噪,形成光滑的点云数据,提高后期建模的精度。
拼接完成形成的是整个扫描范围的点云模型(图4),其数据量比较大,为了提高后期在三维建模软件中建模的效率和流畅性,需将点云数据按照发电机层和水轮机层分别导出,导出数据格式为.las。
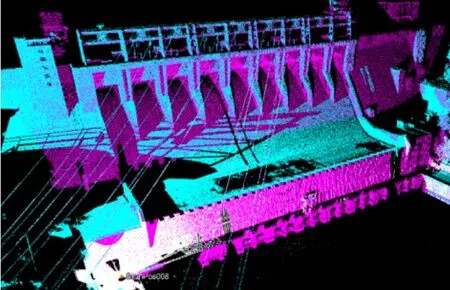
图4 厂房点云轮廓
3.4 三维逆向建模
常用的点云建模软件有Geomagic、Polyworks、Imageware、Autocad、3Dmax等,而 3Dmax更适用于较规则物体建模,2017及以后版本的3Dmax中所带插件Autodesk Recap能识别大部分点云格式,这也为3Dmax建模提供了良好条件[8]。因此选用3Dmax作为建模软件,将分层导出的发电机层和水轮机层点云数据分别导入到3Dmax,根据点云数据可以生成构筑物、管路和设备的外轮廓三角面模型。但由于构筑物外观结构复杂,建模时要进行一定取舍和综合,尽管模型相对点云精度会有一定损失,但根据点云上提取的模型特征点仍可以将模型精度控制达到1cm。
设备精细化模型的创建时,外围轮廓是根据三维激光扫描点云构建三角网进而生成几何模型,能够精确反映设备的结构和外形。管线模型创建是根据中心线和截面尺寸由程序生成模型,管线体的中心线高根据底高或顶高和管径的算术关系求得(忽略管壁厚度)。
采用三维激光扫描技术结合3Dmax形成的发电机层(图5)和水轮机层(图6)的轮廓模型,在外形和定位方面能够跟现场情况完全一致,为了反映现场实景还需要进一步对轮廓模型进行纹理贴图。

图5 发电机层模型(未贴图)
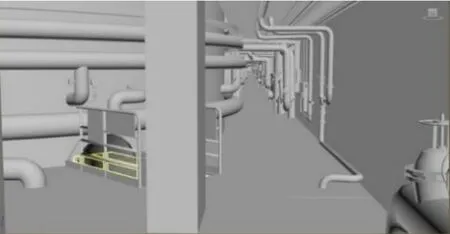
图6 水轮机层模型(未贴图)
3.5 纹理贴图
纹理图片是通过数码相机在现场采集的,纹理数据根据位置和区域进行分类整理,采用专业的图像处理软件Photoshop进行裁剪处理。在贴图前,需要先调整好摄像机镜头的角度和位置,并且划分好贴图范围及需要注意的细节,如对滤水器进行贴图,需要将摄像机镜头角度调整成为滤水器轴测视图,利于观察和贴图,同时贴图时也要考虑远处和暗部的细节问题。利用3Dmax的【材质编辑器】功能,可以很方便的对结构和设备等进行贴图,在弹出材质编辑器对话框中选择经过Photoshop处理的设备及环境纹理图片,获取设备及环境纹理,对设备及环境进行贴图,最大程度的还原现场。贴图后的发电机层及水轮机层模型见图7~8。

图7 发电机层模型(纹理贴图)

图8 水轮机层(纹理贴图)
4 结语
三维激光扫描是比较成熟的技术,在逆向建模中具有高效和精确的特点,本文采用三维激光扫描技术和3Dmax建模软件,建立新安江水电站主厂房发电机层和水轮机层的数字化模型,相对传统建模方法,该逆向建模的方法高效并且精确,通过纹理贴图可以完全还原新安江水电站主厂房实景。然而,该方法虽然比传统建模方法要高效和精确,但是在数据处理和纹理贴图的环节还需要依靠实施人员的经验才能更好地提高建模效率和建模精度。尽管如此,该方法仍然可以为老水电站建立三维数字化模型提供一种高效的逆向建模手段并进行推广。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
建材发展导向(2022年2期)2022-03-08
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年6期)2021-06-09
软件(2020年3期)2020-04-20
华人时刊(2020年23期)2020-04-13
摄影之友(影像视觉)(2018年12期)2019-01-28