永久钢管柱自动实时调垂施工技术在逆作法中的应用
2020-09-30 07:03王朋
工程质量 2020年7期
王 朋
(中城建设有限责任公司,福建 福州 350001)
0 引言
在逆作法一柱一桩施工过程中,当采用永久钢管柱作为建筑物主体结构竖向承重构件时,对其垂直度的控制精度要求非常高,且钢管柱施工过程中难于进行垂直度检查与采取纠正预防措施。一旦施工过程垂直度控制不好,地下室土方开挖后,外露的钢管柱倾斜将会造成结构竖向承载构件无法垂直传递上部荷载,影响结构安全。为此,在逆作法永久钢管柱施工过程中,需要采用一种可靠的施工技术,以确保竖向构件的垂直度,永久钢管柱自动实时调垂施工技术便应运而生。
1 工程概况
南京秦淮区路子铺地块 NO.2013G47 项目位于南京市秦淮区龙蟠南路与永乐路交界西北角,占地面积 13 804.38 m2,总建筑面积 128 252.3 m2。地上由 5 层的裙房(高度为 23.70 m)和两栋 21 层塔楼(主要屋面高度为 78.10 m)组成。地下 4 层,地下室底板顶标高为 -19.70。
本工程基础结构为逆作法施工,立柱采用一柱一桩型式(见图 1),即一个框架柱下面由一个对应的基础灌注柱承受,在形成框架柱之前,采用Φ550×18 钢管混凝土柱承重逆作法中上部结构的荷载,待逆作施工完成后,钢管柱外包钢筋混凝土形成劲钢龙骨框架柱。
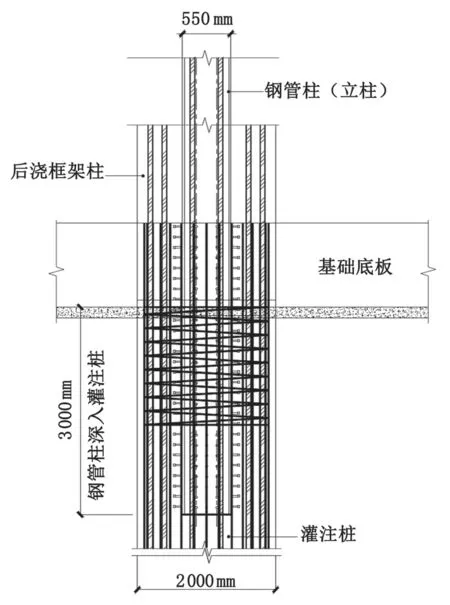
图1 逆作法一柱一桩构造示意图
2 施工重点与难点
根据结构永久受力要求,考虑采用钢管混凝土柱,立柱桩垂直度要求 1/1000,由于立柱桩较深,因此对立柱桩的定位、垂直度控制要求非常高。由于钢管柱在土层中施工,施工过程中较难调整、判定垂直度,垂直度控制措施的可靠性是该项目施工的重点与难点问题。
为此,在逆作法一柱一桩施工过程中,钢管柱采用液压调垂架进行初始固定,通过监测系统取得钢管柱偏斜状态数据,通过调垂架液压千斤顶伸缩,以调整钢管柱的偏斜状态,确保达到设计施工所要求的垂直精度要求。
3 调垂系统组成
钢管柱调垂系统由仪表、电脑输出端、光靶、激光调垂传感器及安装支架、自动控制装置、伸缩千斤顶及通讯电缆等组成,以实现实时测量与监测、自动化调垂等功能。以下介绍几个主要部件。
3.1 仪表
仪表作为输出终端,用于显示和读取相关测量数据和比值,同时也用于激光控制、传感器供电等功能。
3.2 光靶
用于记录激光传感器的射出激光束沿钢管柱刻度。
3.3 激光调垂传感器安装支架
激光调垂传感器安装支架安装在待测钢管柱侧面,主要用于固定传感器和调节调垂传感器所射出的激光束方向,以达到激光束与待测钢管柱的母线平行之目的。
3.4 激光调垂传感器
激光调垂传感器由发射装置和接收装置两部分元件组合标定而成,发射装置的激光束与接收装置的发射测量面相互垂直,读取的角度为钢管柱的垂直测量数值。
4 调垂系统工作原理[1-3]
4.1 实时测量与监测系统
激光调垂传感器的射出激光束和传感器的安装测量底面垂直,在使用中通过安装支架调整激光和待测钢管柱的母线平行,所以传感器的安装测量底面也和待测倒构柱的母线垂直。又因为钢管柱为刚性待测物体,所以当钢管柱下到竖井中时传感器的测量底面是一个和钢管柱垂直的平面,那么只要调整钢构体,使安装于钢管柱的传感器水平时,钢管柱也与水平面垂直。将激光调垂传感器通过预设程序与输出端进行连接,实时测量其倾斜角度和位移偏差数值,以实现动态测量与监测被测量物体的垂直度等相关信息。
4.2 自动化调垂系统
钢管柱上方放置互为垂直的二个传感器,分别实时监测钢柱两个方向的垂直度,根据测定的数据和预设的程序,经过电脑终端综合分析处理后,通过钢管柱上部和下部分别放置的四个伸缩千斤顶对其垂直度和水平位置进行实时调整,整个监测与调整的过程是自动化、程序化、实时化、数据化的,可以实时进行纠偏和调整,以确保钢管柱达到垂直精度的控制要求。
5 施工工艺及技术措施
5.1 测量定位
在复核基准点后,根据图纸对其一柱一桩位置进行测量定位,测量放样立柱桩桩位中心的同时,放样出下放立柱桩所在的轴线及四个定位点。用冲击钻打出定位孔,为将来的立柱校正架下放做准备。
5.2 成孔、一次清孔
调垂系统是在成孔垂直度、定位和孔径均符合要求的基础上实施的,所以成孔质量是逆作法一柱一桩成功实施的前提和必要条件。成孔时,钻机定位应准确、稳固、水平,中心位置允许偏差应≤10 mm,垂直度允许偏差应≤1/500。事先计算好两个孔深和机上余尺,先用 900 mm 的钻头成孔至灌注桩上部标高位置,达到设计孔深时换用 800 mm 的钻头继续成孔,直至设计孔深。
当钻孔达到设计要求的深度,停止钻进,将钻头提离孔底 500~800 mm,维持泥浆和正常反循环清洗吸除孔底沉渣,清孔的同时必须不断地补充新鲜泥浆,将孔内含砂量大、性能差的泥浆置换出来,直到返出泥浆的钻渣含量小于 4 % 为止。
5.3 放置钢筋笼
根据灌注桩深度,钢筋笼可以采用分段和整体吊装方式进行连接和吊装。钢筋笼吊装前应对钢筋笼成品加工质量进行检查、验收,且钢筋笼侧面设置保护层垫块。钢筋笼上的吊环不少于 4 个,每个吊环与不少于 2 根主筋进行焊接,焊接长度应通过计算确定。当分段连接和吊装时,上下端钢筋笼的主筋应采用搭接焊接,单面焊缝长度≥10 d,钢筋接头率、接头错开间距、箍筋补焊等应符合设计及规范要求。吊装时,应检查钢筋笼与灌注桩孔的中心是否重合,并垂直放置于孔口内。钢筋笼承托横担应具有足够强度和刚度,能够承担整个钢筋笼的自重荷载。
5.4 定位平台安装及校正
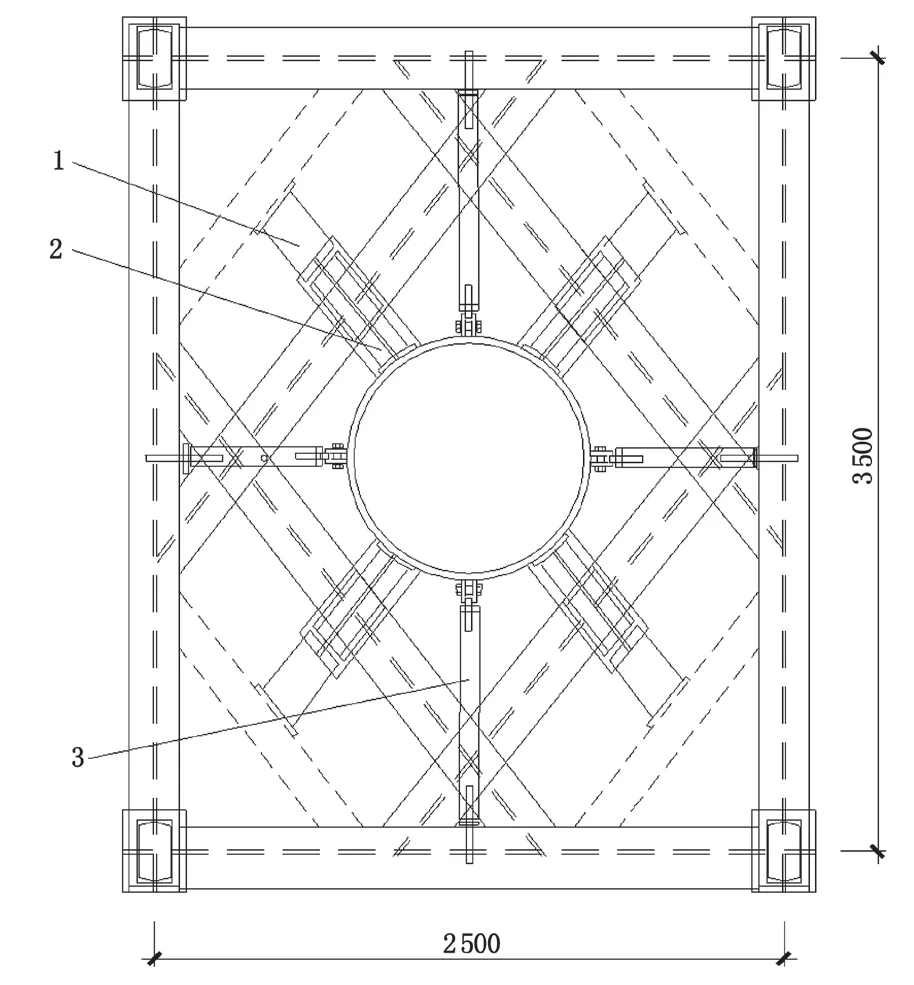
图2 调垂钢架平面示意图(单位:mm)
5.5 钢管柱调垂[4]
通过以下步骤对钢管柱进行调垂。
1)把激光调垂传感器安装支架安装于待测钢管柱侧面,且垂直于钢管柱的纵向方向。
2)激光调垂传感器安装于调整支架上,用螺丝紧固牢靠。
3)激光调垂传感器通过通讯电缆和仪表连接,并打开仪表,进行调试。
4)将光靶靠近激光出射口,进行初始投测,记录光斑在光靶的刻度值,即为第一个记录点。
5)把光靶在钢管柱沿直线后移 1 m,调整安装支架的调整螺丝,使光斑在光靶的位置至第一个记录点。
6)重复第 5)步骤,直到钢管柱尾端,并把调整螺丝锁死。
7)再从开始处复验光斑位置,要求每个测试点都要复验。
8)关闭仪表开关,并拔下通讯电缆。
9)钢管柱吊装至钻好的竖井中后,悬挂在定位平台,将伸缩千斤顶与钢管柱进行顶紧。定位平台要在地面定牢靠,避免因为震动撞击等外界因素影响调整结果。
10)用通讯电缆把激光调垂传感器和仪表连接并开机。
11)根据实际测量的钢管柱长度设置仪表中柱长。
12)依据仪表显示数据调垂钢管柱,调整好后锁死钢管柱定位平台的调整机构,混凝土灌注完成后再采集一次数据为该钢管柱最终垂直数据。
13)计算机根据实时测量和检测的数据对液压动力系统和伸缩千斤顶发出指令,对钢管柱进行自动实时调垂,使钢管柱的垂直度达到设计与使用要求。
5.6 钢管柱吊装、下放
在钢管柱吊装前,须将灌注桩钢筋笼吊入成孔中固定在洞口,并对平台进行清理后移交钢管柱吊装。在钢管柱吊装前,将拼装完毕验收合格的钢管柱,从胎架上水平下架,搁置于地面,采用单机吊装钢管柱,采用旋转法进行吊装,吊钩与地面保持垂直状态,并使吊机吊装半径在最小半径和最大半径之间平稳起吊,最大半径根据钢管柱不同的重量确定。
待钢管柱垂直吊起后,设专人进行指挥,将钢管柱慢慢从定位平台上方插入至桩位孔灌注桩钢筋笼中,按照设计要求的插入深度和钢筋连接形式进行钢管柱和钢筋笼的连接。再次用经纬仪定位在轴线上观测,确保钢管柱表面的标志线校正到与轴线重合,然后旋紧顶部花篮螺栓,并在搁置牛腿二侧焊接限位块,启动自动实时调整系统,然后同时下放钢筋笼和钢管柱。
5.7 放导管、二次清孔
钢管柱安放到位后,及时下放导管,并进行第二次清孔。第二次清孔采用正循环进一步将孔底沉渣吸出,同时逐步降低孔内泥浆密度,二次清孔应持续至混凝土到场后结束,以泥浆指标和孔底沉淀物厚度符合规范要求为主要控制指标。
5.8 混凝土浇筑及柱周回填
不论钢管及灌注桩混凝土强度等级是否相同,均应采用水下混凝土浇筑方式一次性浇筑,其导管的距孔底间距、直径、连接方法、埋深等应符合规范要求。对于不同混凝土强度,应设置专人负责观测混凝土浇筑面上升高度,在混凝土接近钢管底面时,放慢混凝土的浇灌速度,并严格控制拆导管的进度和导管埋深,确保混凝土能正常上反的同时不能断层。在钢管内混凝土浇筑高于设计桩顶标高一倍桩径时,停止浇筑混凝土,同时对钢管外侧桩孔内对称地回填石子,回填高度对称差值不能大于 200 mm,在回填石子期间间断活动并慢慢提升导管,在灌注钢管内混凝土过程随时测量桩孔内石子面高度,如有上浮应立即停止钢管内混凝土灌注,继续回填石子,石子回填一定高度后继续灌注钢管内混凝土,如此反复直至混凝土从钢管上部的开口处溢出,直至翻浆溢光,可戳到石子方为混凝土浇筑完毕。
5.9 调垂架的拆除
钢管柱的调垂架可以循环周转使用,以满足施工进度为原则进行配备。调垂架的拆除应满足以下条件:混凝土灌注完成且达到终凝,用规定的回填材料填充钢管柱四周至接长钢管柱顶面,同时将孔内溢出的泥浆排至指定位置。拆除时严禁碰撞、踩踏、扰动已经浇筑完成的混凝土和回填材料面层,地脚螺丝及其焊接部位不得暴力拆除。
6 效益分析
自动实时调垂施工技术在逆作法中的应用,使得永久钢管柱垂直度控制更加可靠,操作简便,提高了施工效率,缩短了钢管柱施工的工期,降低了成本。同时,自动实时调垂施工技术在逆作法中的应用,提高了永久钢管柱的施工质量。在南京秦淮区路子铺地块 NO.2013G47 项目永久钢管柱施工完成后,其垂直度都能够达到 1/1000 之内的要求,没有发生因垂直度不达标而进行的结构加固、改造等现象,具有很高的推广价值。
7 结语
逆作法永久钢管柱施工过程中采用自动实时调垂施工技术,成功解决了逆作法施工地下室承重钢柱的控制精度问题,极大地完善了逆作法施工工艺,为进一步发挥逆作法施工的优越性克服了一个重要障碍,也为进一步推广应用逆作法工艺创造了更加美好的前景。
猜你喜欢
建材发展导向(2021年20期)2021-11-20
建材发展导向(2021年10期)2021-07-16
建材发展导向(2021年6期)2021-06-09
石油化工建设(2020年1期)2020-08-24
城市道桥与防洪(2019年5期)2019-06-26
西夏学(2019年1期)2019-02-10
江西建材(2018年4期)2018-04-10
中国公路(2017年19期)2018-01-23
中国核电(2017年2期)2017-08-11
中国工程咨询(2015年1期)2015-02-14