外场使用红外靶标系统的设计
2020-09-29 03:09:06夏天元帅宏进邱亚峰
应用光学 2020年5期
夏天元,帅宏进,邱亚峰
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.泰州市京泰路街道水利站,江苏 泰州 225300)
引言
随着红外成像制导武器在军事领域的应用越来越广泛,人们对红外成像制导武器性能的要求也更趋严格,有必要在武器正式投入使用前进行性能测试,以验证其性能是否满足使用要求[1]。以往的试验是在室内进行的,利用带有平行光管的红外靶标模拟出无穷远处的模拟红外目标,探测器对这些模拟目标进行观测从而完成测试[2-3]。然而室内比较理想的环境往往与真实环境有着较大区别,不能很好地反映出使用环境,例如湿度、雾霾、温度等参数对红外成像制导武器性能的影响。目前,国内的外场测试方法通常为在靶场中对飞机、导弹真实目标进行实测[4],费时费力且无法对红外成像设备进行定量评估。
为了准确地测试红外成像制导武器的技术性能,本文利用面源黑体作为热源,用刻有不同空间频率的红外靶标图案的靶轮作为背景板,设计了一套外场使用的可提供不同温度、不同空间分辨率的红外测试靶标系统,主要用于外场红外目标探测器的最小可分辨温差(MRTD)测试。
1 MRTD测试原理
最小可分辨温差(MRTD)是红外热像仪的主要成像特性,其定义为:在一个可为观察人员分辨的标准周期测试图案中,目标和背景的最小可分辨温差[5]。用于MRTD测试的靶板如图1所示。图1中图案是高度和宽度比为7:1的4杆图案,靶杆之间的间距与靶杆的宽度相等[6]。MRTD是目标空间频率的函数,规定MRTD的测试需要在至少4个空间频率f1234(c/mrad)上进行,选择能反映探测器工作要求的空间频率,当红外成像系统用于恶劣气候条件或低温差目标时,应选取更低的空间频率[7]。
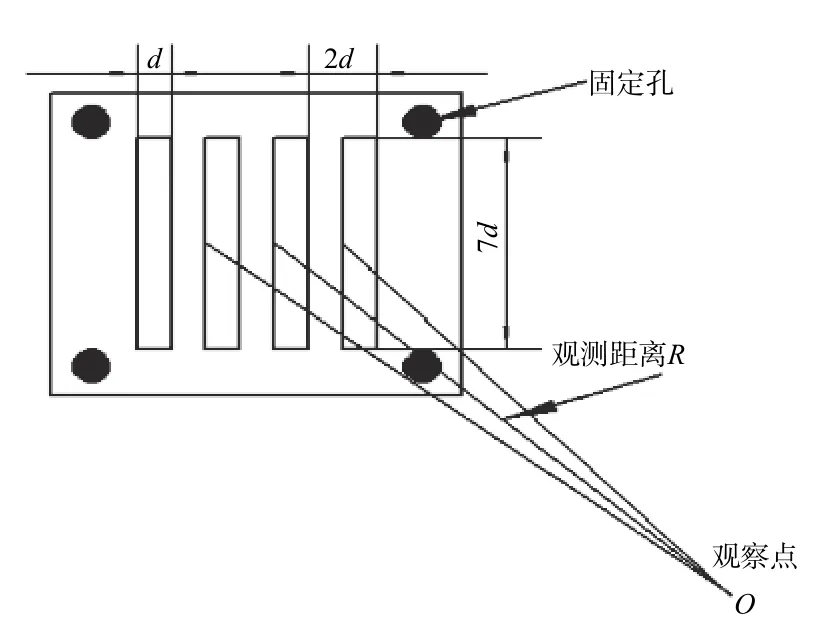
图1 靶板与空间频率示意图Fig.1 Schematic of target board and spatial frequency
红外4 杆靶的空间频率由下式计算:

式中:R为探测器距离靶板的距离;d为4 杆靶靶杆宽度;f为靶板空间频率,单位c/mrad。
MRTD测试过程为[8]:先将黑体温度调至与背景温度一致,然后逐渐提高面源黑体的温度,增大靶标温度与背景温度之间的差值,测试人员通过软件时刻观察采集到的灰度图像。当实验人员恰好可以分辨出黑白杆图案,即整个靶杆面积的75%时,此时温差记为T1,则红外成像系统的MRTD值为

式中K表示测量系统的校正系数。
MRTD测试对于靶板表面温度的均匀性要求较高,一般要求温差控制在1.0℃以内。目前,为了解决温度均匀性问题,普遍采用的方法是利用电阻丝加热整块黑面板[9-10],但是采用这种方法,电阻丝分布密集,控制复杂,难以直接应用于外场大型测试靶。针对该问题,本文直接利用面源黑体作为热源,用刻有不同空间频率红外靶标图案的靶轮作为背景板,可有效降低控制难度并提高靶板表面温度均匀性。
2 红外靶标系统设计
2.1 红外靶标系统总体结构设计
红外靶标系统的一般结构如图2所示。系统主要由靶板、二维调节机构和车体组成。靶板提供模拟红外目标,主要包括面源黑体、旋转靶轮与背景板。面源黑体作为热源,是测试过程中的黑杆部分;靶轮上镶嵌有不同大小的背景板,不同的背景板上刻有不同空间频率的条杆图案;面源黑体放置在靶轮和背景板后,与背景板形成温差,通过转动靶轮可以切换不同的空间频率,以此作为MRTD测试的红外靶标。二维调节机构可以调节目标靶的俯仰角与方位角,包括俯仰调节机构、框架和方位调节机构。俯仰调节机构与方位调节机构都包含带有手轮的蜗轮蜗杆减速器,通过转动手轮对照箱体上的角度刻度即可实现俯仰角与方位角的调节。车体承载整个设备,内部放置电源、工控机等装置,可以在测试结束后将红外靶标系统移至室内进行保存。

图2 红外靶标系统三维图Fig.2 3D schematic of infrared target system
进行MRTD测试时,测试人员设定期望的黑体温度,工控机通过控制控制器使黑体加热到指定温度与背景板之间形成所需的温差。旋转靶轮可以更换不同的目标靶,从而为MRTD测试提供不同的空间频率。图像采集单元可以采集探测器接收到的含有目标与背景红外辐射特性数据的二维灰度图像数据,经过软件分析完成被测探测器的性能评估,最后工控机将测试数据发送到信息
管理中心进行数据储存。
2.2 目标靶板设计
2.2.1 热力学分析
红外靶标系统的主要功能就是使目标与背景之间形成所需要的温差,并在目标温差下保持热平衡,包括系统自身提供热能的过程和与外界交换热能的过程[11]。只有在任一工作时刻内红外靶标系统输入的热能量与耗散的热能量相等才能保证系统工作时的热平衡。
红外靶标放置在室外环境除系统自身电源提供热量外,还会与外界进行热交换,主要是对流换热与辐射换热。设系统提供的热能为Q1,系统的对流换热能量为Qf,系统的辐射换热能量为Qe,∆Q为一段时间内系统实际吸收的热能。则单位时间内系统的对流换热能量可以表示为

式中:A为传热面积;Tu是物体的表面温度;Te是流体温度;h为对流换热系数,与物体的几何尺寸、温度及物理特性有关。
红外靶标系统总的辐射换热能量为

式中:ε为系统的黑度;A为传热面积;σ0为黑体辐射常数;T为系统最终温度;T∞为环境初始温度。
根据能量守恒定律可知:

黑体升温时要求 ∆Q >0,热稳定平衡时要求∆Q=0。
2.2.2 靶板结构设计
靶板所要求的技术参数如下:
1) 温度范围为5℃~100℃;
2) 靶面温度均匀性<2℃;
3) 辐射率≥0.95。
本系统的靶板由背景板、面源黑体和旋转靶轮组成。背景板上镂出12组不同大小的4 杆靶图案,以提供不同的空间频率。靶板空间频率的选择以被测红外成像制导系统的战术技术指标与使用单位的需求为标准,通过不同距离估算,制作不同空间频率的红外靶板,对应的靶标频率见表1所示。黑体置于背景板后方,其发出的热辐射透过背景板的镂空部分形成4 杆图案作为测试时的目标,其结构如图3所示。
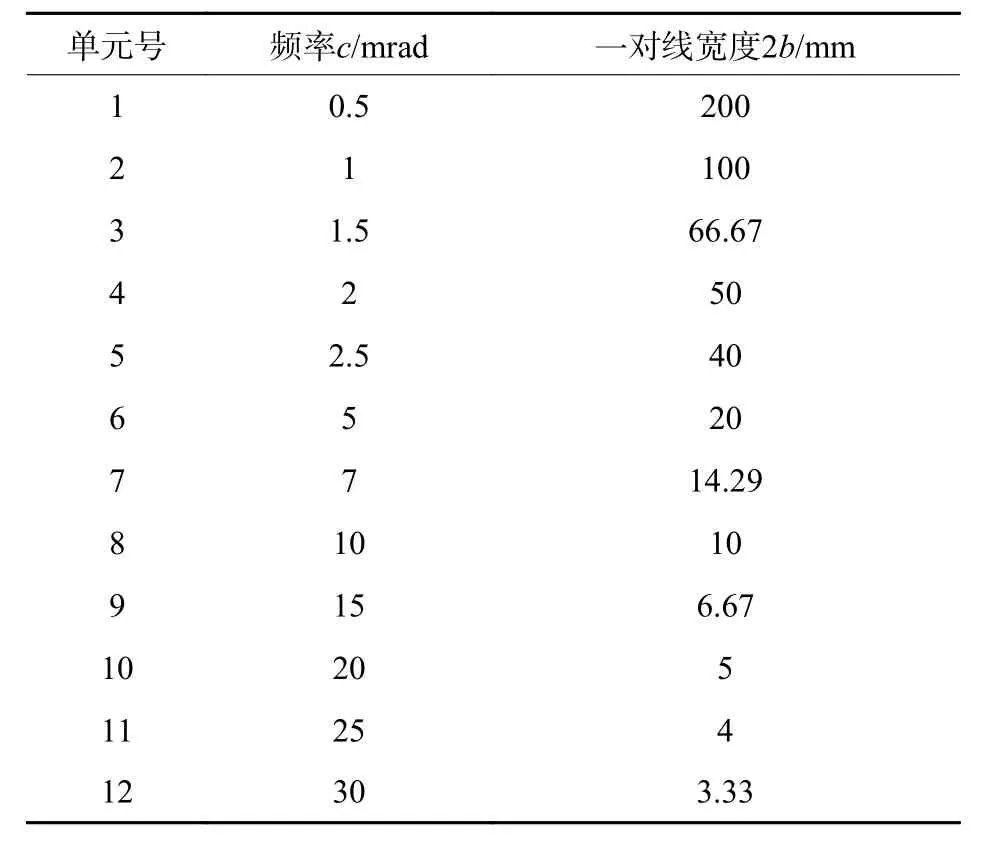
表1 靶标频率表Table1 Target frequency

图3 靶板三维图Fig.3 3D schematic of target board
系统使用为上海福源光电有限公司定制的面源黑体,可实现−5℃~105℃的温度调节,温度分辨率可达0.001℃,温度均匀性可保持在±(0.2~0.3)℃,其表面发射率在0.985 以上,满足靶板所要求的技术参数。
本系统直接将黑体作为被测目标,且黑体表面积相对整个靶板较小,可有效减少黑体与外界发生热交换并降低控制难度,使得系统具有较高的温度均匀性、温控精度和升温速率,显著提高了靶板的工作性能。背景板材料为光学玻璃,背面涂覆高反射率的涂层,正面黑化,使其表面辐射率与黑体相同,达到0.95 以上。
当红外靶标系统在工作时,靶轮时刻受到后方面源黑体的辐射,靶轮的温度易受到环境的影响而发生改变,会对测试的稳定性带来影响,因此制作靶轮的材料应具有良好的耐热性。不同材料的热传导能力可通过下式来体现:

式中:c比为热传导层的比热容;ρ为热传导层的密度;d为热传导层的厚度;C为热传导层的热导率;t为响应速率,t值越大,代表传热能力越差。
本系统选用聚甲醛(POM)作为靶轮的制作材料。聚甲醛被誉为“超钢”,在具有超高硬度的同时又具有良好的隔热特性[12]。将几种常用材料的性能参数代入(6)式,可以计算出一定温度下这些材料在厚度相同情况下的响应速率。不同材料响应时间如图4所示。由图4可见,厚度相同时,铜、铝合金、45#钢的响应速率相近,而POM的响应速率远大于另外3种材料,为铜的980倍,可见POM的隔热性很好。若采用POM 制作靶轮,可以有效地防止环境影响引起的温度变化。
2.3 温控系统设计
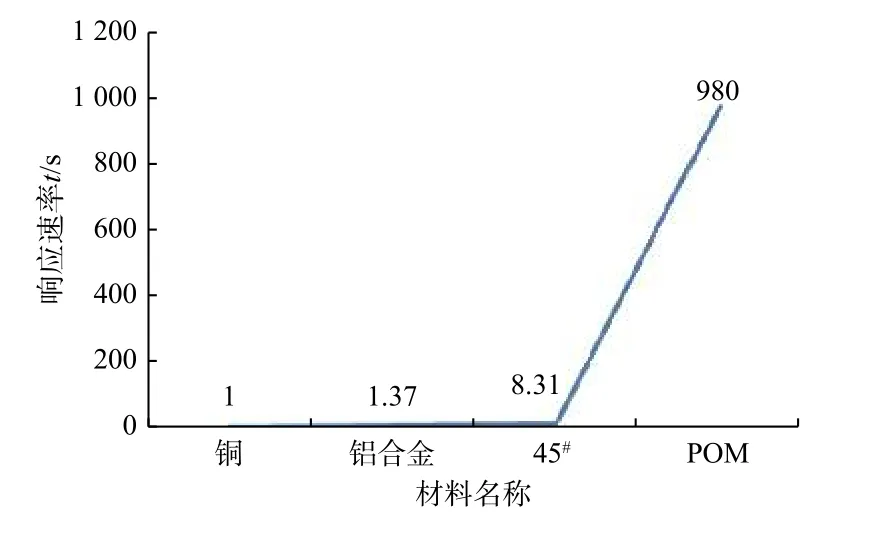
图4 不同材料响应时间图Fig.4 Response time of different materials
在实际控温过程中,环境温度无法保持恒定不变,黑体时刻与外界进行能量交换,这就需要不断对黑体的温度进行调整。
温控系统主要部件是背景板与黑体上的测温元件Pt100,Pt100 具有尺寸小、稳定性好、宽温度范围、精度高等优点[13]。为了维持系统的热平衡,首先需要确定黑体的当前温度T0。温度值通过A/D转换器转换成电信号,与目标值T1进行对比,将其差值∆T作为控制量反馈给温度控制器,从而使黑体的实际温度不断逼近目标温度。具体控制原理如图5所示。
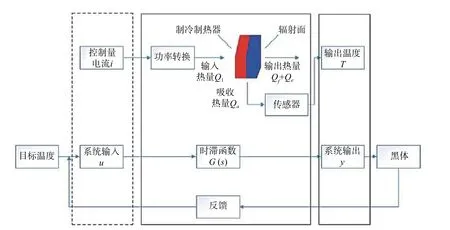
图5 温控原理图Fig.5 Schematic of temperature control
由于受到Pt100 测量的黑体内部温度与靶板表面的实际温度不同,以及黑体辐射率等因素的影响,靶板温度与系统预设温度会产生误差,需要对靶板表面进行温度校正,然后在软件上设置一个修正量进行补偿,从而使测试结果更加真实可信。
靶板的标定需定期进行。首先对背景板与黑体上的测温回路进行校正,以保证靶板温度的控制精度与准确性,然后利用高精度红外测温仪对靶板进行温度测量并与系统预设的黑体温度进行对比,以此来完成靶板的标定。
2.4 二维调节机构设计
2.4.1 二维调节机构结构说明
二维调节机构所要求的技术参数如下:
1) 方位角为±60°,手动调节;
2) 俯仰角为±45°,手动调节;
3) 调节精度为1°。
二维调节机构作为直接与靶板相连的部分,不仅起到承载靶板的作用,还需要能够在满足一定技术要求的情况下对靶板进行二维角度调节。主要包括俯仰调节机构、框架与方位调节机构,其结构如图6所示。
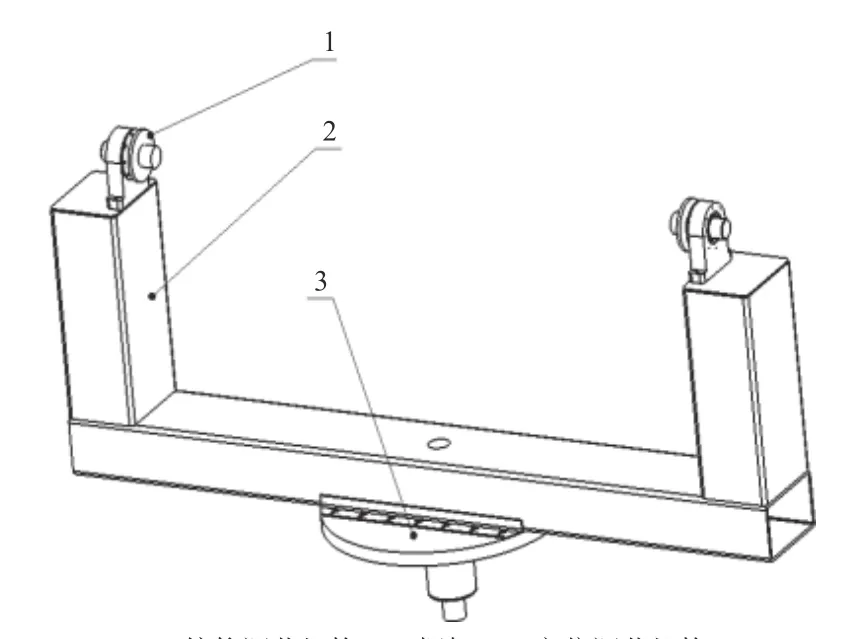
图6 二维调节机构三维图Fig.6 3D schematic of 2D regulating mechanism
俯仰调节机构直接与靶板相连,俯仰轴一端与靶板连接,一端与带有手轮的涡轮蜗杆减速器相连,端盖处刻有±45°的标记,通过转动手轮就可以改变靶板的俯仰角度。框架起到连接俯仰调节机构与方位调节机构的作用,由45#矩形钢焊接而成,其壁厚为8 mm。方位调节机构承载整个系统,其主体转盘采用厚度为35 mm的45#钢制成,方位轴下端与带有手轮的涡轮蜗杆减速器相连,通过转动手轮可实现±60°的方位角调整。
2.4.2 二维调节机构负载能力分析
靶板方位角与俯仰角的调节均为手动调节,惯性负载小,因此只需重点分析二维调节机构的静载能力即可。Ansys是一款大型的有限元分析软件,功能强大,模块众多,在国内外大中型企业以及高校中得到了广泛的应用[14]。本文利用Ansys进行静力学分析。
俯仰轴直接与靶板相连,承载靶板的质量,受到靶板的重力与轴承的支撑反作用力的作用,俯仰轴如果强度不够,将发生较大的形变,使旋转阻力变大,严重时会发生断裂。为确保俯仰轴有足够的强度承载靶板的质量,通过Ansys Workbench对俯仰轴的受力进行静力学分析,结果如图7所示。
由图7可知,俯仰轴的最大应变出现在轴的中间位置,为5.17e-5,其应变可忽略不计,说明俯仰轴完全可以承载靶板的质量。
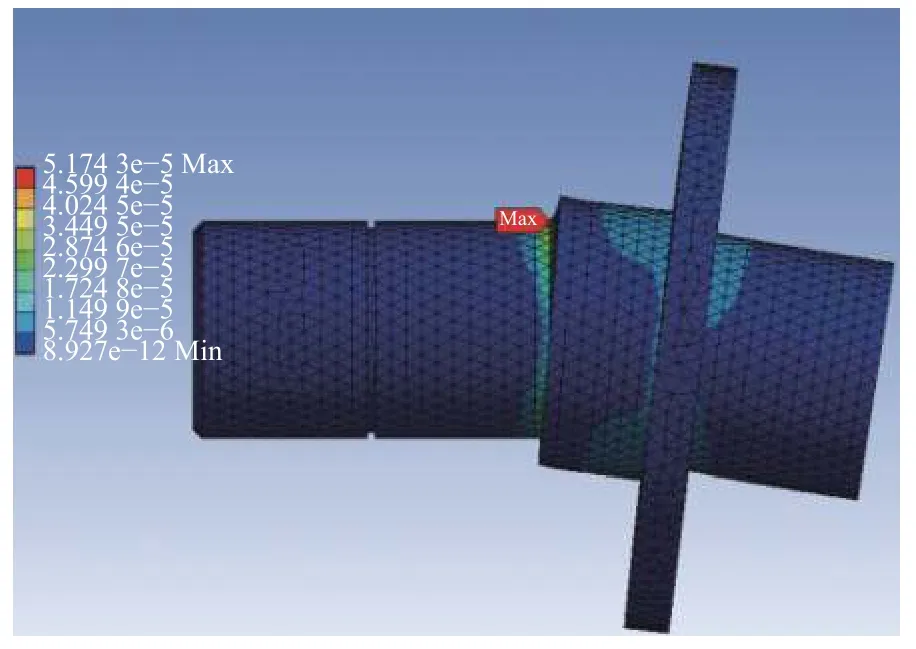
图7 俯仰轴等效应变云图Fig.7 Equivalent strain diagram of pitch axis
框架左右受到所支撑机构向下的压力,框架底部横梁的中心会产生较大的弯矩,若横梁刚度不足则会发生较大变形。图8为框架的等效应变云图。由图8可看出,最大应变出现在横梁的中心位置,为1.5e-4,其应变可忽略不计,说明框架的强度满足使用要求。
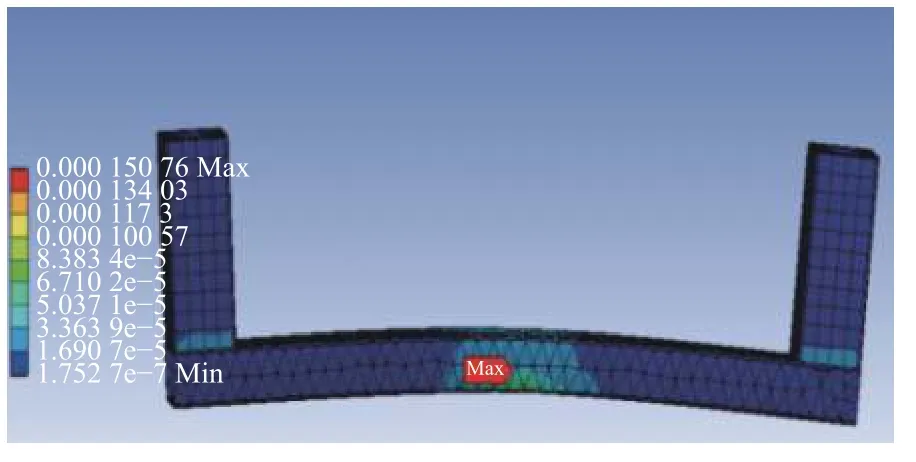
图8 框架等效应变云图Fig.8 Equivalent strain diagram of frame
方位调节机构承载其上方所有机构的质量并与箱体连接,方位调节机构中的转盘作为支撑件会受到极大的压力与支撑反作用力,若强度不足会产生较大的变形,图9为转盘的等效应变云图。由图9可以看出,最大应变为1.5e-5,其应变可忽略不计,说明转盘的强度满足使用要求。
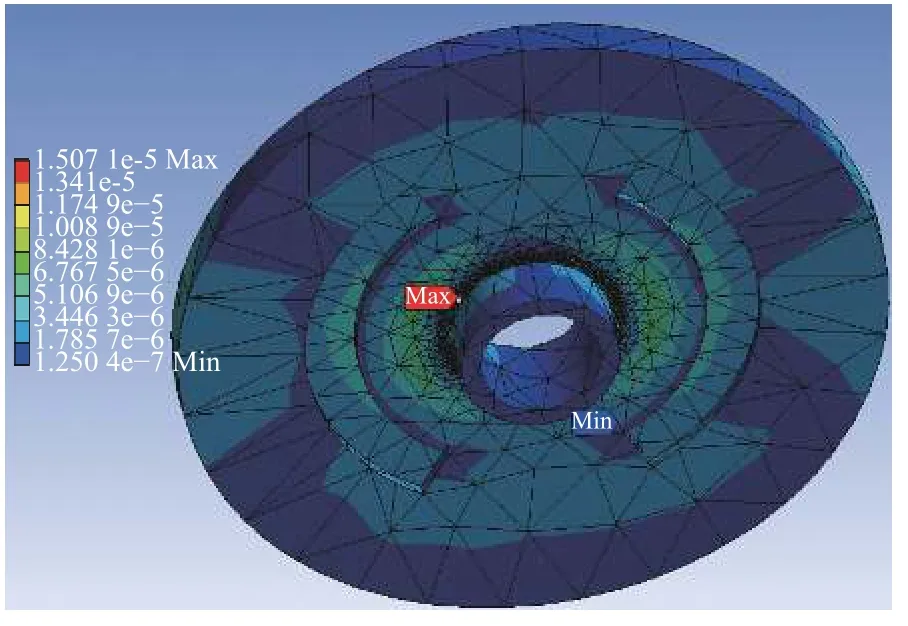
图9 转盘等效应变云图Fig.9 Equivalent strain diagram of swivel plate
3 红外靶标系统的应用
此系统主要应用在以下几个方面:
1) 对内场测试后的红外探测设备再次进行外场检验;
2) 作用距离的测量;
3) 不同气象条件下红外探测设备的MRTD测试。
此红外靶标系统采用与传统MRTD测试相同的方法进行检测,但是在外场情况下,大气透过率对红外辐射的传播有着很大的影响[15],因此在测试之前应先对外场环境的相关因素进行测量,例如大气湿度、背景温度、气溶胶含量等。充分考虑大气传输特性的影响,这样才能真实地反映红外成像制导武器在多种环境下的工作性能。如果测试结果与内场结果有出入,应当重点考虑当时的外界环境因素再进行分析比较。
4 结论
本文设计了一套外场使用的红外靶标系统,使用面源黑体作为目标源,可进行-10℃~150℃范围内的温度调节,辐射率达到0.95 以上,温度均匀性在1℃以下,满足外场MRTD的测试要求。使用旋转靶轮可进行不同空间频率的切换,有效减少了面源黑体的面积与控制难度,提高了黑体的温度均匀性。运用三维软件对整个红外靶标系统进行了建模,并对二维调节机构的几个关键部分进行了力学分析与仿真计算,结果表明其强度满足使用要求。
应用此系统为红外成像制导武器提供更真实测试环境的同时,还可替代传统的外场实飞检验,大大降低了外场检验成本,具有广阔的应用前景。
猜你喜欢
包装工程(2023年24期)2023-12-27 09:20:00
遥感学报(2023年10期)2023-11-24 09:57:20
高压物理学报(2020年6期)2020-12-01 10:02:14
上海交通大学学报(2020年4期)2020-05-07 09:38:42
兵器装备工程学报(2019年7期)2019-08-13 01:22:06
兵器装备工程学报(2019年6期)2019-07-05 00:40:08
中国中医眼科杂志(2016年6期)2016-04-08 06:53:00
物理实验(2015年9期)2015-02-28 17:36:51
电脑知识与技术(2014年16期)2014-07-28 05:22:45
Communications in Mathematical Research(2013年4期)2013-08-10 06:49:24