52 m金枪鱼延绳钓船设计阶段振动控制
2020-09-28 03:20:14袁奎霖徐占鹏崔洪宇洪明
山东交通学院学报 2020年3期
袁奎霖,徐占鹏,崔洪宇,洪明
1.大连理工大学 船舶工程学院,辽宁 大连 116000;2.大连渔业公司,辽宁 大连 116000
0 引言
随着远洋捕捞业的快速发展,我国渔船建造市场已由以往追求大批量生产转向开发结构优良、绿色清洁、振动噪声低的新型渔船[1-7]。近年来,国内学者研究了船舶振动预报和减振方法[8-15]。江水等[16]总结了渔船振动的振源、振动形式及减振措施等问题。安小同等[17]采用数值预报与实船测试相结合的方法,分析冷海水贝运输船艉部主甲板的局部振动问题,并提出了有效的减振措施。刘媛等[18]针对秋刀鱼/鱿鱼钓船设计阶段的振动控制问题,分别采用经验公式和有限元法预报了船舶总体振动固有频率和局部结构振动特性。张媛等[19]以脉动压力、轴承力和主机激振力作为激励,采用MSC.Patran/Nastran建立拖网渔船全船三维有限元模型,分析强迫振动,在计算结果满足振动基准后优化结构减振,提出最优减振方案。
金枪鱼延绳钓船是最近远洋渔船中发展较快的一种渔船,该船型不仅要有较高的航速来转移渔场,还应有良好的低速性能配合起钓捕捞作业,对主机和螺旋桨的要求非常高,因此如何避免船舶振动成为亟待解决的问题[20]。本文以52 m金枪鱼延绳钓船为研究对象,在设计阶段对船体振动进行计算分析与控制,避免过大振动的发生。基于结构有限元振动计算得到船体相关结构振动特性,结合螺旋桨和主机主要激励进行分析,并提出了相应的结构修改方案,以期为同类型渔船的设计提供参考。
1 船舶概述
52 m金枪鱼延绳钓船为单机单桨艉机型船,船艏设艏楼,艏楼后部的主甲板是起绳、收鱼的作业甲板,桥楼与艉楼相连形成长艉楼,长艉楼上部是长甲板室,甲板室前端是驾驶室,总布置如图1所示。船体首尾垂线间长44.80 m,型宽8.50 m,型深3.75 m,设计吃水深度为3.30 m,排水量为877 t,服务航速为12.0 kn;主机为XCW8200ZC-10,额定转速为1000 r/min;螺旋桨选用5叶定距桨,直径为2.8 m,转速为186 r/min。船作业时间最长的工况为起绳工况,航速为8.4~8.6 kn,相应主机转速为600~650 r/min。
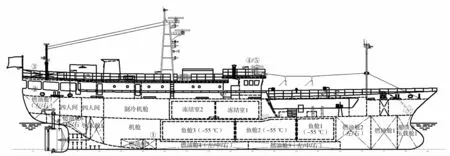
图1 52 m金枪鱼延绳钓船总布置图
2 主要激励
2.1 主要激励频率
船上激励主要为主机和螺旋桨,渔船的主机转速相对较高,对应的激励频率也较高。多缸高速机的平衡特性一般优于低速机。螺旋桨激励主要考虑叶频和倍叶频成分,主要是作用在桨上方外板的表面脉动激励[21-22]。
螺旋桨和主机在工作过程中都存在轴频激励,相应的频率

式中:N为螺旋桨或主机转速,r/min。
螺旋桨产生的叶频和倍叶频激励频率

式中:fprop为螺旋桨激励频率,Hz;K为激励阶数,为叶频时K=1,为倍叶频时K=2;Z为螺旋桨叶数。
本文主要考虑主机及螺旋桨轴频激励和螺旋桨叶频及倍叶频激励,结合船的工况,确定相应的激励频率,为船体结构有限元振动分析提供依据,避免发生共振,减小可能出现的较大振动。根据金枪鱼延绳钓船的设计要求,分别计算绳工况(主机转速为600~650 r/min)和航行工况(主机转速为 850~1000 r/min)2种典型工况下的主要激励频率进行,结果如表1所示。

表1 典型工况主机与螺旋桨主要激励频率 Hz
2.2 螺旋桨脉动压力预报与校核
从减小伴流影响来说,螺旋桨离船体越远越好,叶梢与船体之间的间隙越大越好,如图2所示,螺旋桨净空尺寸[21]2-61为:a=0.12D,b=0.20D,c=0.14D,d=0.04D,其中 D为螺旋桨直径,目标船螺旋桨直径为2.8 m。根据螺旋桨净空尺寸校核目标船螺旋桨与艉部特征间隙设计数据,如表2所示,结果表明,目标船满足相应规范要求。
预报计算螺旋桨在船体表面引起的脉动压力。无空泡螺旋桨在船体表面引起的叶频脉动压力[23]

式中:R为螺旋桨半径,m;ds为当叶片在顶部位置时,从螺旋桨0.9R处到浸入水中的计算表面的距离,m。
由螺旋桨空泡引起的叶频脉动压力

式中:vs为船速,m/s;wTmax为最大伴流峰值;we为有效伴流;ha为螺旋桨轴浸深,m;K0和Kc为系数。
螺旋桨作用在船体外板上的等效总脉动压力

由式(6)得螺旋桨产生的脉动压力为3.39 kPa,小于规定限值8.0 kPa,满足脉动压力衡准要求[23]27。
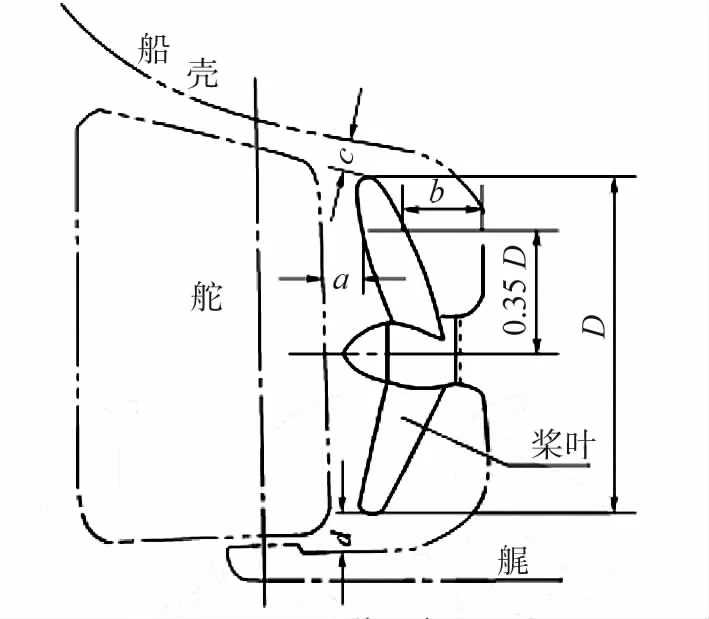
图2 螺旋桨净空尺寸示意图

表2 螺旋桨净空尺寸校核 m
3 船体总体固有频率预报及共振分析
3.1 船体总体固有频率的有限元分析模型
为判断整个船体处于关心激励频率段的共振区域,采用MSC·Patran建立全船三维结构有限元模型,分析其固有频率。船体结构采用壳单元模拟板材,主要单元为550mm×500mm;横梁、纵骨及纵桁用梁单元模型。整个模型共有23 243个单元,12 021个节点,整船有限元模型结构网格如图3所示。
计算分析振动时,船上非结构物体的质量需要采用相应单元考虑,主要是大型设备和动力装置。附连水质量采用MSC.Nastran中的流固耦合分析,通过水线下剖分湿表面单元的源汇分布法进行计算。
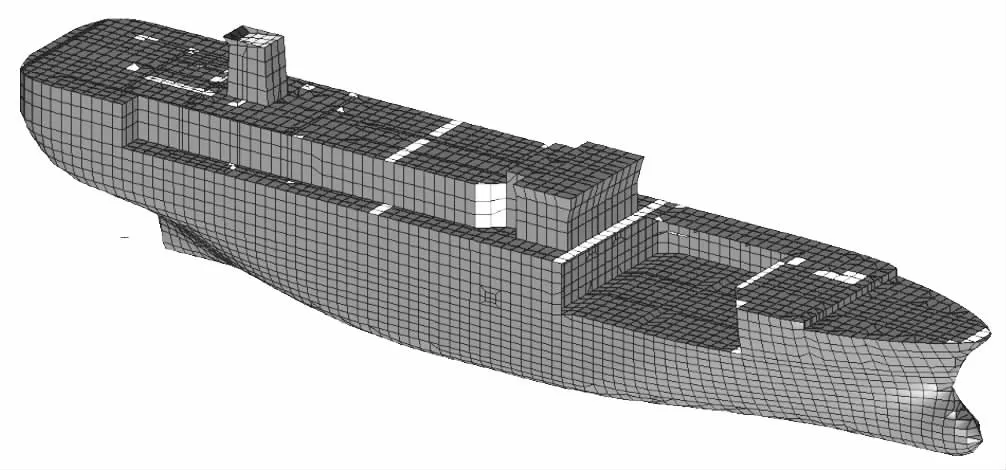
图3 金枪鱼延绳钓船结构有限元模型
3.2 船体总体固有频率的计算结果与分析
渔船作业包括出港捕鱼、捕鱼中、满载返航、满载到港和空载到港等载况。由于极端载况可反映船舶振动性能的优劣,因此选择出港捕鱼和空载到港2种载况。
采用ABS[24]推荐的Kumai经验公式近似计算出港捕鱼工况下的垂向振动固有频率,并与有限元模型的计算结果对比。首阶(2节点)垂向振动固有频率

式中:Iv为船体舯剖面惯性矩,m4;L为船体首尾垂线间长,m;Δi为包含附连水质量效益的有效排水量,t,Δi=(1.2+1/3×B/T),其中 B为型宽,m;T为平均吃水深度,m。
二阶及以上垂向振动固有频率

式中:n为振动振型节点数;α为计算船型相关系数,渔船α一般取0.845。
采用Kumai经验公式与有限元模型计算的垂向振动前三阶固有频率如表3所示。结果表明两者基本吻合,证明了全船有限元模型的有效性,可用于后续船体总体固有频率的预报及共振分析。
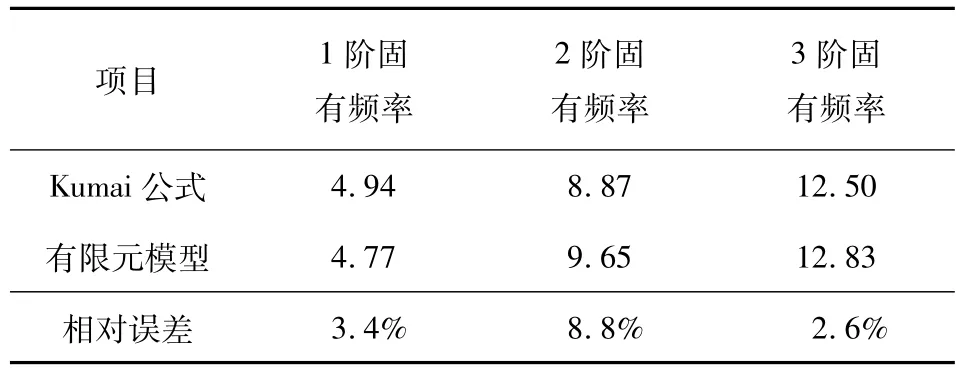
表3 出港捕鱼工况垂向振动各阶固有频率 Hz
根据金枪鱼延绳钓船的工作特点,主机转速主要考虑全速航行与起绳作业(主机低速转速下航行)2种典型工况。在主机转速范围内,分析船上主要激励频率与船体总体垂向振动的固有频率,主机转速与结构固有频率的关系如图4所示。
在全速航行工况即主机达到额定转速的85%~100%时,主机轴频和螺旋桨叶频激励与船体垂向3阶频率相近;在起绳工况即主机达到额定转速的60%~65%时,主机轴频和螺旋桨叶频激励与船体垂向2阶频率相近,表明设计方案中的船体总体振动未能避开激励共振,可能引起过度振动。一般在制造过程中将主机轴频激励控制在非常低的量级,可以适当忽略影响。在设计额定工况下,螺旋桨脉动压力强度满足衡准限定值,引起总体过大振动的可能性不大,但需要进一步对重点局部区域进行振动分析和频率储备计算。
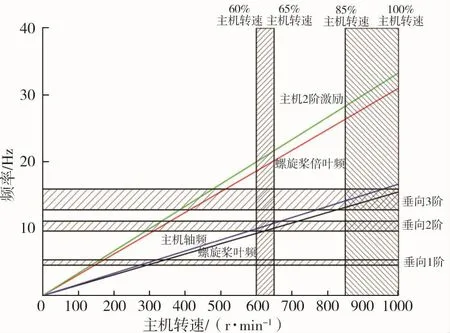
图4 主机转速范围内钓船的总体垂向振动固有频率和主要激励频率遭遇示意图
4 船体局部结构振动分析与减振设计
通过对原始设计结构的有限元振动分析,并结合船上主要激励频率,对发生共振遭遇模态的局部结构提出减振修改方案(尽可能选用已有型材加强结构)。为了减少边界条件简化的影响,驾驶室罗经甲板局部结构延伸至驾驶甲板处,边界条件为对驾驶甲板连接的位置进行简支固定。有限元模型如图5所示。
对改进后的结构重新进行有限元分析。罗经甲板振动计算结果如图6~9所示。
由图6~9可知,罗经甲板第2阶模态频率21.34 Hz与起绳工况下主机二阶激励频率遭遇,在45#~46#附近区域产生局部振动模态。因此,建议加强45#和46#横梁,结构由原来的L63mm×40mm×5mm改为L100mm×63mm×7mm,如图10所示(图中单位为mm)。
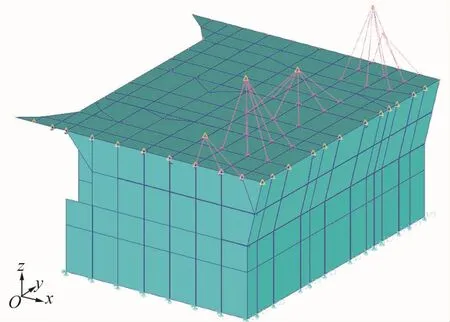
图5 罗经甲板局部振动有限元分析模型
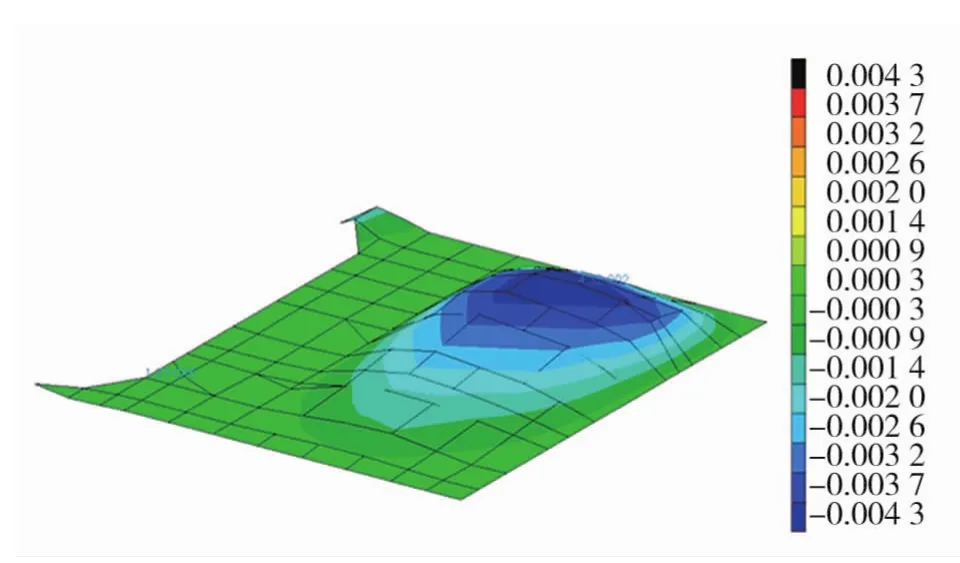
图6 罗经甲板16.87 Hz一阶振动固有模态

图7 罗经甲板21.34 Hz二阶振动固有模态
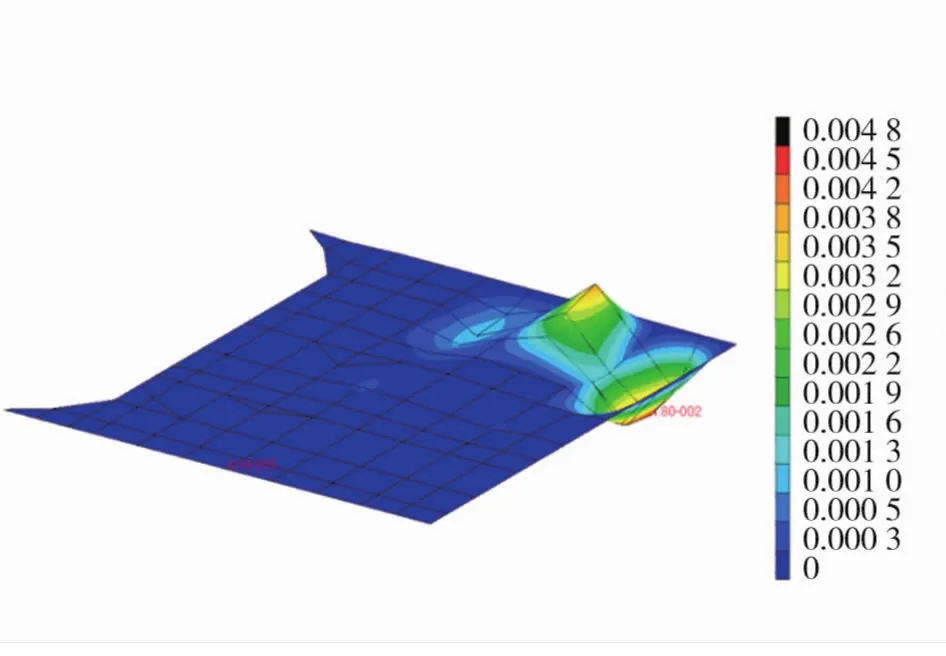
图8 罗经甲板25.76 Hz三阶振动固有模态
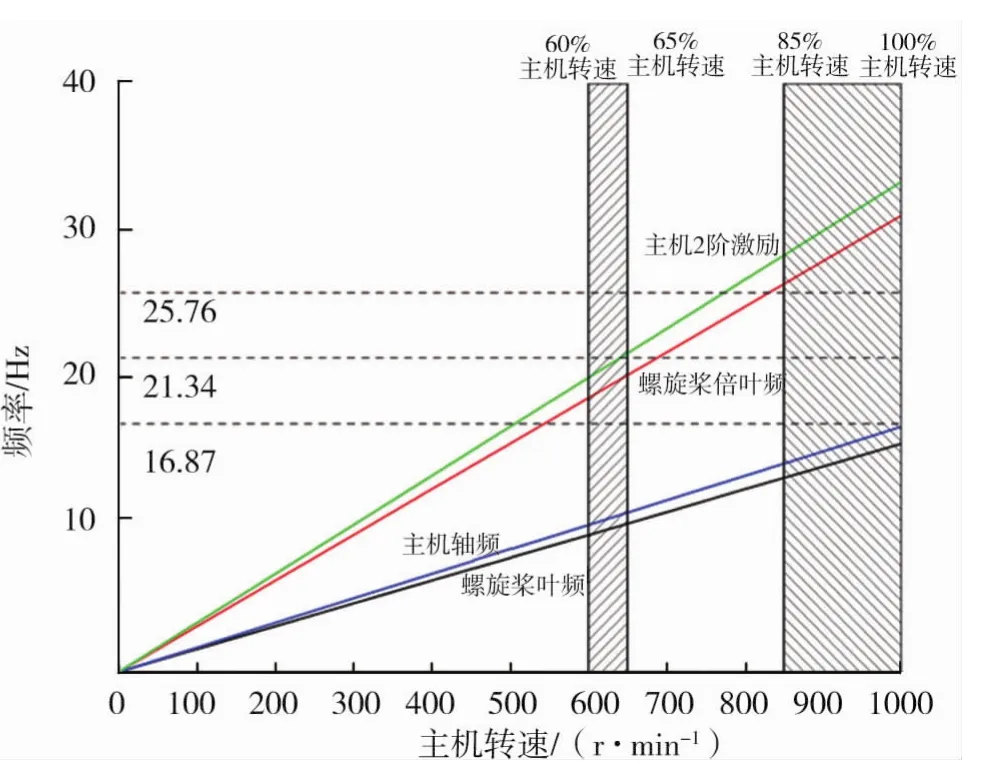
图9 原始设计驾驶室罗经甲板局部振动固有频率与激励遭遇示意图
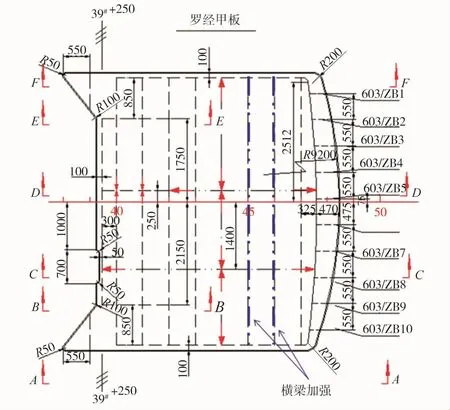
图10 罗经甲板结构加强修改示意图
经过结构改进后的罗经甲板模态振型与相应频率结果如图11~13所示。罗经甲板的前二阶模态频率均避开了螺旋桨和主机的危险频率范围,表明改进后的罗经甲板结构合理。

图11 罗经甲板17.23 Hz一阶振动模态
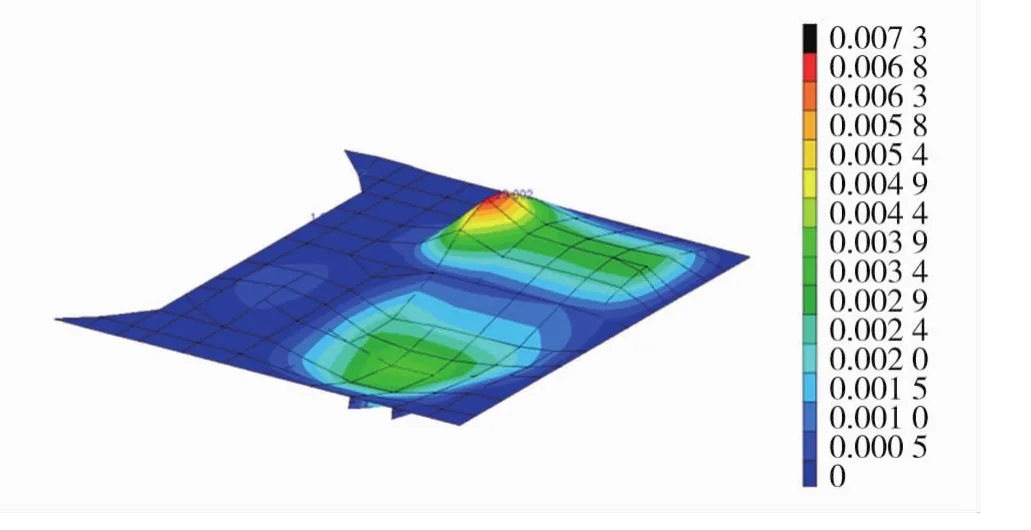
图12 罗经甲板26.44 Hz二阶振动模态
分析其他局部结构的振动,根据计算结果,改进出现问题的结构。
1)驾驶甲板艉部。根据有限元计算结果发现,驾驶甲板-5#~5#区域存在较多危险模态,建议加强-4#和 0#横梁,将原角钢L75 mm×50 mm×5 mm改为T型材T150 mm×6 mm/70 mm×7 mm;分别在距船中左3000 mm和距船中右3000 mm处从尾部至7#+350 mm处各加一纵桁,构件尺寸均为T150mm×6 mm/70 mm×7 mm,如图14所示(图中单位为mm)。
2)艉部船体板架结构。根据有限元计算结果发现,在艉部淡水舱舷侧存在危险振动模态,因此建议将该舱舷侧肋骨由原角钢L90 mm×56 mm×6 mm改为T型材T150 mm×6 mm/70 mm×7 mm,如图15所示(图中单位为mm)。
最终计算结果表明,改进后结构的固有频率可有效地避开主要激励频率。

图13 修改后驾驶室罗经甲板局部振动固有频率与激励遭遇示意图
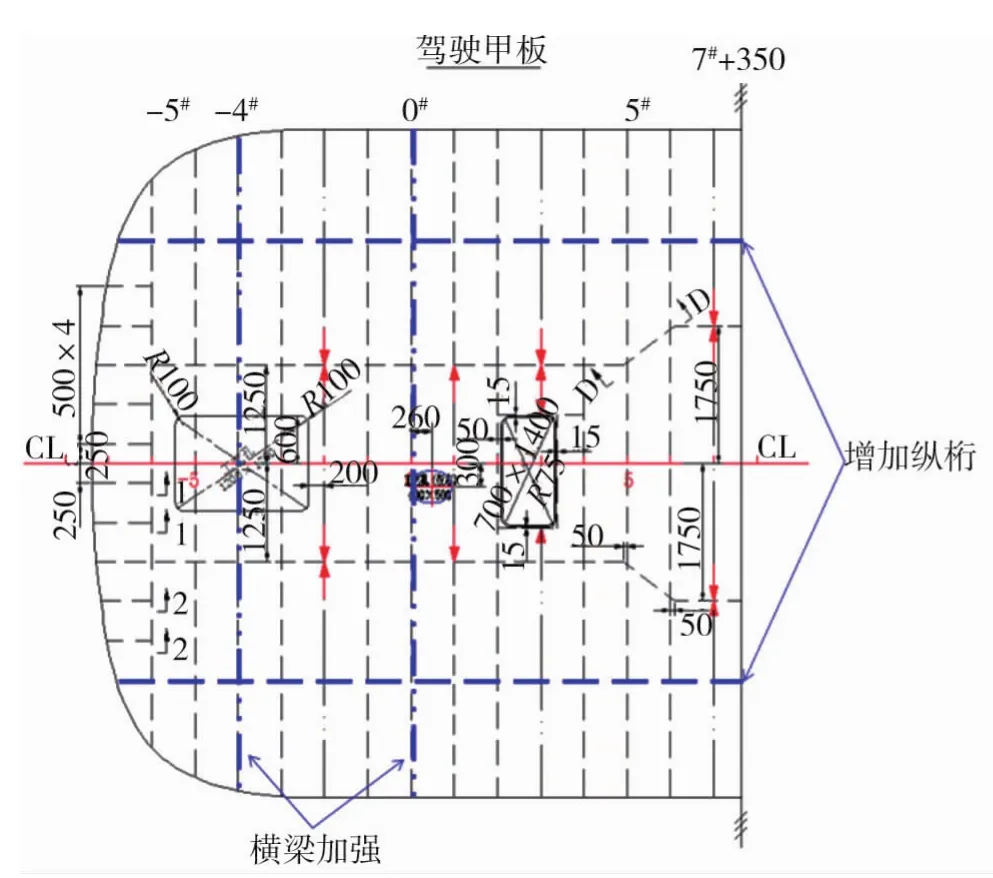
图14 驾驶甲板结构加强示意图

图15 艉部淡水舱结构加强示意图
5 试航实船振动测试结果分析
为了验证设计阶段振动控制的效果,在试航过程中对船体进行了振动测量。测点包括主机基座(①号测点)、驾驶甲板艉部(②号测点)、艉楼甲板(③号测点)以及罗经甲板(④号和⑤号测点),具体测量位置如图1所示,所有测点均为垂向布置。分别在600~650 r/min(起绳工况)和850~1000 r/min(航行工况)主机转速范围内共10个不同转速下测量,测量结果如图16~18所示。
由图16可知,螺旋桨叶频和倍叶频激励峰值比较明显。
由图17可知,螺旋桨叶频非常明显,倍叶频响可忽略。由图18可知,1000 r/min转速下的振动明显,低转速下的振动很小,没有超过文献[25]的限定。
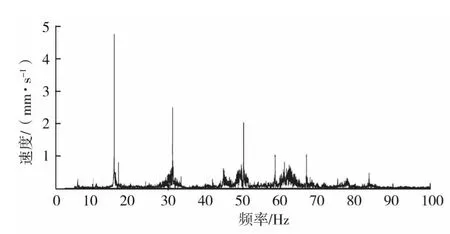
图16 主机1000 r/min驾驶甲板艉部垂向振动频谱
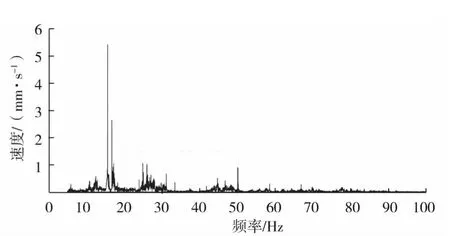
图17 主机1000 r/min罗经甲板(④号测点)垂向振动频谱
6 结语
本文对设计建造中52 m金枪鱼延绳钓船实施振动控制,重点是优化结构设计,以减少共振。实船航行振动测量结果反映原振动剧烈区域经改进结构后没有出现较大的有害振动,设计过程振动控制需要注意以下问题:1)选择主机时可考虑选择振动特性优良的机型,在推进、排放和振动等约束中优化选择。2)方案设计阶段,需考虑螺旋桨的叶数和转速、综合推进效率和振动性能。3)艉部线型设计需考虑螺旋桨的激振力,包括船体去流段水线夹角和螺旋桨与艉部轮廓间隙满足相应设计建造规范要求,必要时校核螺旋桨脉动压力。对艉部、驾驶室及重要舱室处结构进行振动校核,避免出现与主要激励共振,必要时则需要加强结构,改变结构的固有频率。4)在试航过程中,有条件对重要部位,尤其是修改部位进行振动测量,研究采取振动控制措施后的效果,积累设计经验。5)设计过程中的振动控制需要同时考虑其他设计因素,满足使用要求,保证建造工艺的可行性及可接受的经济成本等。
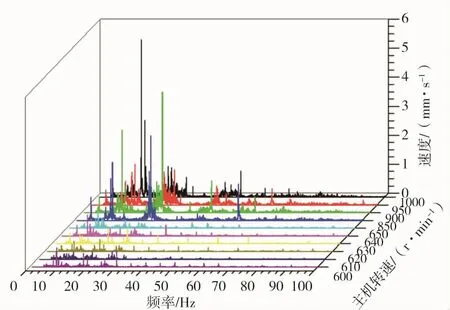
图18 主机不同转速罗经甲板(④号测点)垂向振动频谱
猜你喜欢
船海工程(2021年1期)2021-03-02 05:32:02
中国船检(2020年10期)2020-11-07 09:56:38
航空发动机(2020年3期)2020-07-24 09:03:16
船舶标准化工程师(2020年1期)2020-06-12 09:16:34
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
国防(2017年12期)2017-04-09 07:52:09
反射疗法与康复医学(2017年7期)2017-01-16 01:11:18
实用手外科杂志(2015年2期)2015-08-28 09:50:44
广东造船(2015年6期)2015-02-27 10:52:46