
基于SolidWorks 与Matlab 的无游梁式抽油机仿真平台设计
2020-09-28 09:19:52曹忠亮郭登科张宏斌胡清明
实验技术与管理 2020年5期
曹忠亮,郭登科,张宏斌,胡清明
(齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161001)
抽油机是油田开采过程中的主要设备,其执行机构直接影响着工作效率。Matlab 中的SimMechanics是专门用于机械领域建模仿真的机构系统模块集,可以使机构仿真结果更加直观[1-3]。SimMechanics 模块是以牛顿经典力学中力和力矩等基本概念为基础编写的,适用于各种运动副连接的刚性构件的建模与仿真,能够对机电控制系统进行分析与设计[4]。
国内外研究者已经利用SimMechanics 对不同的机构模型进行了大量研究[5-7]。康信勇等[8]以六自由度工业机械臂ER10 为研究对象建立其对应的SimMechanics仿真平台,并进行运动学和动力学分析。赵元等[9]利用SimMechanics 仿真平台对3UPU/UPS 并联机器人进行仿真研究,在仿真平台中增加PID 控制模块。彭学锋等[10]基于SimMechanics 对两轮机器人进行仿真。季哗等[11]利用SimMechanics 建立4-UPS/PPU 并联机构运动模型,得到运动平台对应的位置、速度等变量的变化规律。
本文针对黑龙江省大学生创新创业项目“一种新型无游梁式抽油机设计”,以无游梁式抽油机的执行机构为例,将虚拟仿真技术应用到实际教学环节,提出一种使用SolidWorks 与Matlab 搭建物理模型仿真的方法,实现三维虚拟样机的建模及运动仿真,并采用PID控制器对模型进行优化设计,验证运动轨迹特性。在无梁式抽油机虚拟仿真平台搭建过程中,学生可以很好地领会建模与控制过程,快速掌握执行机构中的绕轮轴和配重块的位移图,并基于配重块的实际轨迹,得到执行机构运动学模块随时间的变化规律;学生可以直观地对抽油机虚拟结构进行相应的优化设计,有利于提高独立思维能力和创新意识,降低研发工作量。
1 无游梁式抽油机执行机构
新型无游梁式抽油机由控制系统和机械系统组成,如图1 所示,主要通过电网驱动电动机带动抽油泵往复运行。框架顶端两侧有两个固定的吊耳,一端固定钢丝,另外一端钢丝进行换向,下端与油井相连接。中间为传动装置,由带传动和齿轮减速器完成对电机的第一级和第二级的减速工作,完成对减速器输出扭矩辅助做功,用空间来换取效率,大大降低了电机的平均功率,达到了节能的效果。该设计方案已经获得国家专利[12]。

图1 抽油机基本构成
无游梁式抽油机的执行机构包括:主轴、大曲柄、小曲柄和配重块。主轴外圆周面固定套内有行星轮系的太阳轮和大曲柄大端,行星轮系的内齿圈设有外轮齿,内齿圈的外轮齿与同步带传动机构的主动带轮啮合连接。曲柄轴外圆周面固定套装有同步带传动机构的从动带轮、大曲柄小端和小曲柄大端,小曲柄小端与配重块固定连接。两个定滑轮装置均通过各自的轮轴固定安装在机架上部的左右两端,扁钢丝绳一端与位于右侧的定滑轮装置固定连接,另一端依次绕过绕轮和定滑轮装置与悬绳器上端固定连接。为保证辅助效果最佳,大曲柄和小曲柄的旋转方向相反,旋转速度相同,初始位置大、小曲柄间要有一定的夹角。
2 从SolidWorks三维软件导入SimMechanics
使用Matlab 建模时,常常遇到简单模块难以表示的零件,通常解决方法是通过Matlab 编程语言自己编写模块,如抽油机中的曲柄模块。零件复杂程度越高,编写程序越难,严重阻碍了仿真进度。本研究将用于三维实体设计的SolidWorks、Pro/E 等软件的模型改为可以导入SimMechanics 中的XML 文件,从而避开对复杂零件的自定义模块编程工作。
利用SolidWorks 强大的三维建模功能建模,完整的无游梁式抽油机SolidWorks 模型如图2 所示,模型包括抽油机的机架、电动机等零件。将SolidWorks 模型另存为可导入SimMechanics 的文件,同时生成记录零件尺寸的STL 文件。
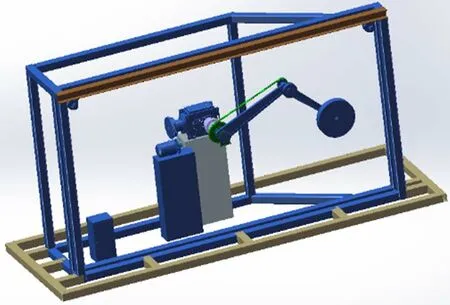
图2 抽油机SolidWorks 模型
此外,设计者还可以将SolidWorks 模型另存为VRML 模型,通过Simulink 下的Simulink 3D Animation进行虚拟仿真。Simulink 3D Animation 可以建立待仿真机器的虚拟样机和虚拟环境,在最接近实际情况下进行仿真。通过Simulink 3D Animation 仿真后可以直接生成控制系统的C 语言程序,省去了后期编程工作,从而大大提高了仿真效率,缩短了研发周期。
3 仿真平台组建与分析
3.1 自定义曲柄模型
在对曲柄进行建模时,首先需要以轴连接孔圆心为拆分点将曲柄拆分成3 个部分:Left、Main Link、Right。每一部分的截面形状都是封闭图形。建立曲柄模型的顺序是先中间后两边。每个部分都需要一个Solid(刚体)模块来建模,然后通过Rigid transform(刚性变换)模块定义两刚体间的相对位置并连接成一个完整的曲柄模块。
建立模型之前,首先要用Matlab 语言定义拉伸体的截面形状。在Matlab 上新建脚本文件并命名,在编辑区内写入脚本程序。建立好曲柄模型后,需要进行封装处理。将曲柄模型封装成模块形式,有利于随时更改参数、调整仿真状态。使用同样的方法建立基座、绕轮轴和配重块的模块。
3.2 组装模型
根据抽油机零件装配关系,将基座、曲柄、绕轮轴和配重块依次连接。仿真结果通过Scope(示波器)和XY graph(坐标系图形)显示。由于建模过程中坐标系频繁转换,仿真结果以主坐标系为准,因此需要Transform sensor(坐标转换)模块连接在被测位置和主坐标系之间,如图3 所示。SimMechanics 的模块之间信号为物理信号,而 Scope、XY graph 只接受Simulink 信号,因此需要使用PS-simulink converter(信号转换)模块预先进行信号转换处理[13-14]。
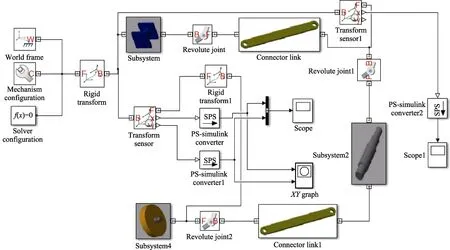
图3 执行机构模型
3.3 PID 控制模块
在无控制情况下的SimMechanics 仿真得到的结果十分混乱,不能满足设计使用要求,因此需要添加PID 控制模块对模型的运动进行控制。将 Revolute joint 模块设置为输入扭矩、输出转速,将输入信号和输出信号分别接入PID 控制器两端,结合抽油机工作参数,添加常数模块表示输入的转速,设置其值为0.2π,如图4 所示。
PID 控制模块初始状态下默认P 和I 的值为1、D值为0。PID 控制模块接入模型后,可以直接进行P、I、D 参数修改。进入Tune 界面后,系统会预先模拟运行模型程序,然后得到相应的传递函数曲线,设计者可以直接用鼠标滑动Response time(响应时间)滑块更改传递函数曲线,滑动Transient behavior(瞬态行为)滑块更改模型的鲁棒性,直到模型符合要求为止。同时,还可以点击绘图命令来添加系统的Bode图,以便直接观察系统的稳定性。当系统稳定且满足设计使用要求时,直接将参数写入PID 控制模块。
3.4 仿真结果
在含PID 控制模块的系统中,绕轮轴的位移如图5 所示,配重块的位移如图6 所示,配重块的实际轨迹如图7 所示。
从仿真结果图像不难看出,该抽油机执行机构的运动周期是10 s,上下最大位移量为0.9 m。配重块的运动轨迹呈椭圆形,速度无明显变化,运行平稳,无振动。配重块在x、y 方向上运动不会同时处于极限位置,保证了机器能够顺利通过死点,在无外界干扰的情况下能够满足生产需要。
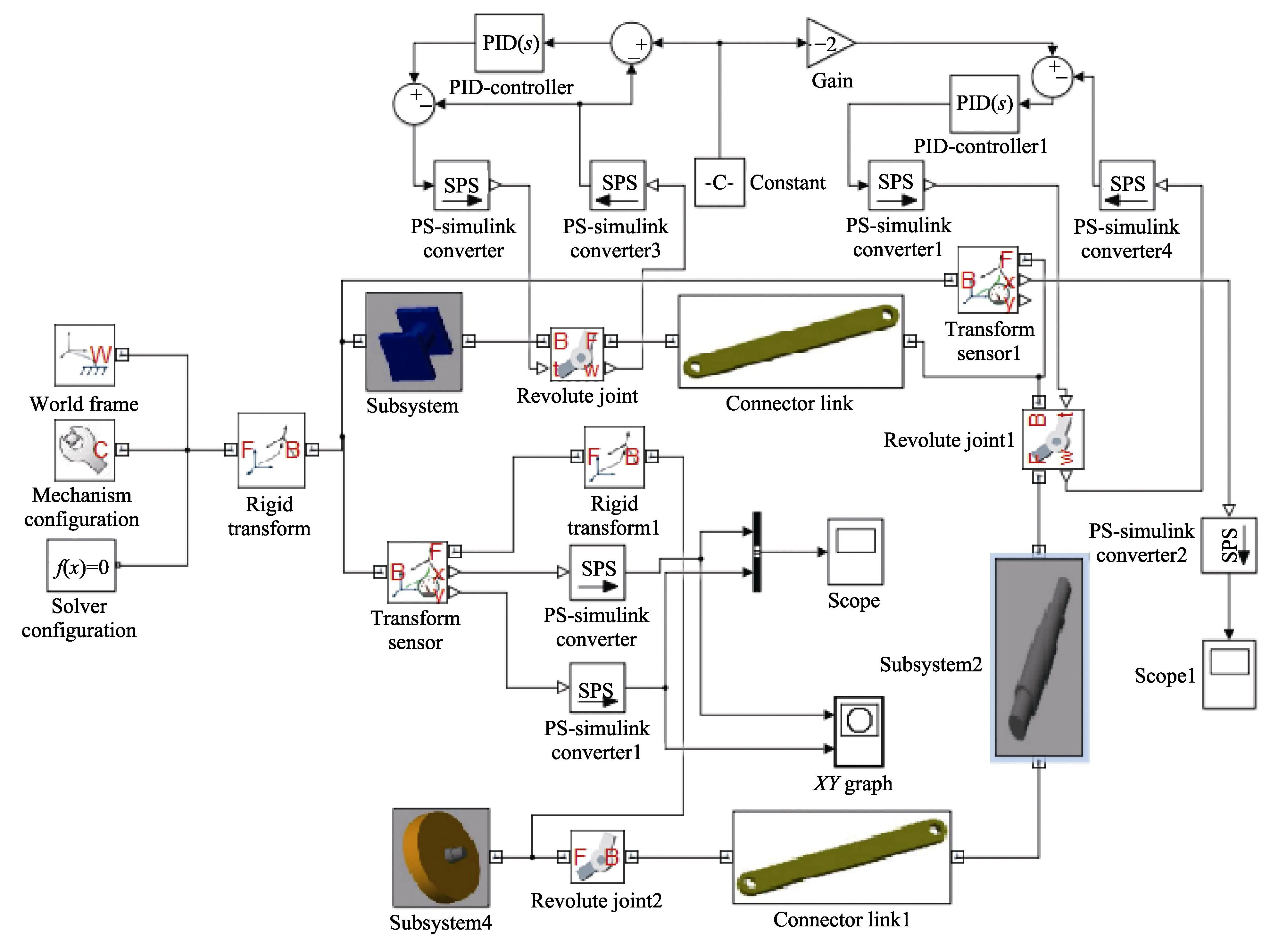
图4 含PID 控制的执行机构模型

图5 绕轮轴的位移图
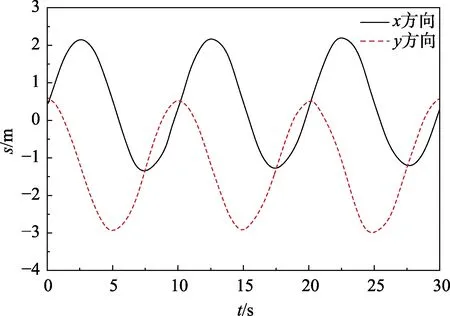
图6 配重块的位移图
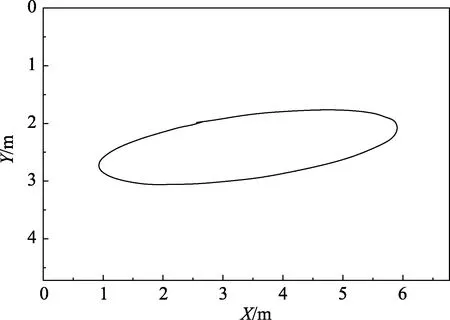
图7 配重块的实际轨迹图
4 结论
利用SolidWorks 与Matlab 建立了新型无游梁式抽油机执行机构的虚拟样机,为抽油机产品的研发提供了更高效的仿真方式。在控制方面,采用PID 控制器对模型进行优化设计,得到了较为理想的仿真结果。仿真结果证实了该抽油机虚拟仿真平台的可靠性。本文在对无游梁式抽油机的建模实验中利用搭建的虚拟样机进行了仿真,提高了设计及仿真的效率。通过仿真模型平台,可以使学生掌握以下知识:
(1)通过Matlab 软件中的SimMechanics 建模既不需要计算和搭建数学模型,也不需要大量的程序编写工作,模型采用模块搭建,省时省力,可以省去大量复杂的计算。
(2)通过随时更改模型参数和运动参数,在同一平台可进行控制系统和机械系统的仿真,仅通过直观搭建的物理模型就可以进行实时分析,大大缩短了研发周期,降低研发工作量。
(3)通过仿真平台设计可以提高学生的学习兴趣,培养学生从书本理论到项目设计、再到实际应用的一整套思维方式,帮助学生掌握仿真平台的相关编程算法,逐步提高科研能力和创新能力。
猜你喜欢
科学导报(2023年13期)2023-03-08 02:26:44
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
机械制造(2021年9期)2021-10-12 12:28:08
机械管理开发(2021年5期)2021-06-29 08:57:00
石油石化节能(2021年1期)2021-01-23 02:06:42
中小企业管理与科技(2019年34期)2019-12-23 01:03:46
中学科技(2018年9期)2018-12-19 09:27:26
装备制造技术(2015年11期)2015-11-30 08:19:52
导航定位与授时(2014年2期)2014-04-27 13:41:08
