
任务驱动教学法在小学信息技术课堂的应用策略
——苏教版六年级信息技术《机器人沿线行走》教学案例与反思
2020-09-28 10:23江苏连云港市九里中心小学万雪妮
小学教学研究 2020年30期
江苏连云港市九里中心小学 万雪妮
任务驱动教学法是指教师在教学中把学习目标分解成一个个学习任务,让学生在强烈的问题动机驱动下,积极主动地应用学习资源进行自主探索和协作学习,从而完成既定学习任务。 下面以《机器人沿线行走》一课为例,谈谈把任务驱动教学法应用于小学信息技术教学的实施方法。
一、提出任务,进行学习
(一)创设情境,引出问题
用多媒体播放机器人沿线走比赛的视频,引出机器人沿线走的话题。
师:视频中的机器人是怎样进行竞赛的?
生1:沿着规定的路线行走竞赛。
生2:沿着地图上的轨道行走竞赛。
师:你们想不想亲手设计一个程序,来一场现场机器人行走竞赛?
生齐:想——
师:让我们来进行一场刺激的机器人沿线走比赛吧!(板书:机器人沿线行走)
思考:以视频导入新课,可以诱发学生对新知识的强烈好奇心,从心理上激发学生的学习期待。
(二)分析原理,开展学习
师:要使机器人行走自如,就必须让它“学会”识别路线。那么如何让机器人“学会”识别地图上的轨迹线呢?
生:(交流讨论)通过灰度传感器识别轨迹线。
师:由于轨迹线和场地颜色的灰度值的差异很大,机器人必须通过灰度传感器来判断、调整路线,才能始终沿着轨道行走。
师:请同学们分组测试机器人行走时,场地和轨迹线的灰度值分别是多少。(学生分组测试、记录灰度值)
思考:引导学生回顾旧知识,可以帮助学生消除对新知识的陌生感,为接下来的教学做好心理铺垫。 让学生预先测量出场地和轨迹线的灰度值,可以为下面学习机器人沿线走的编程提供原始数据,同时也为下面学习编程扫除了技术障碍。
二、执行任务,学习编程
(一)分析机器人沿线走的可能状况
师:以黑线为标准,想想视频里机器人沿线行走时,与黑线间出现了几种状况?(学生激烈讨论)
生:出现了五种状况:①完全在线上;②向左偏;③向右偏;④完全左偏;⑤完全右偏。
师:下面,我们根据这五种状况学习编写相应的程序(编写流程如下图)。
(二)程序初始化操作与灰度传感器设置
1.程序初始化操作
师:我们要新建一个程序,先自定义两个变量black和max。black表示场地与轨迹线感光值的中间值(就是你们刚才测试的场地和轨迹线灰度值的中间数),max表示机器人行走的状态。你们算算刚才测的black值是多少?
生(计算后):black=450。
师:我们统一规定,变量max=0表示机器人向左偏;max=1表示机器人向右偏;max=2表示机器人在线上。现在,我们先设定max的初始值等于2。
学生定义变量black、max,完成程序初始化操作。
2.设置灰度传感器
师:下面我们练习设置灰度传感器。
(1)单击“系统设置→传感器设置”,设置通道1和通道2为灰度传感器。
(2)在工作区添加并设置灰度传感器的属性为通道1和通道2。
学生操作灰度传感器的设置。
思考: 教师详细演示程序初始化的操作过程,一方面使学生了解机器人沿线走主要有几种参数值, 引导学生以此为基础一步步学习编程操作;另一方面帮助学生攻克了新知难点,放缓了编程操作的坡度,也降低了编程操作的难度,为下面正式开始编程奠定良好的基础。
(三)探究五种行走路线的编程与操作
师:要使机器人按五种轨迹行走,我们就要修改、调整程序相应的参数值。
1.机器人在黑线上
导:首先,我们学习编写机器人完全在线上的程序。
(1)添加一个单分支控件,设置属性为“条件一:通道1的值≤black;条件二:通道2的值≤black”。
(2)在单分支控件中添加直流电机控件,设置:直流电机1与电机2都是“正传、速度15”。
做:学生独立编写机器人在线上的程序。
思考:让学生从最简单的情况(机器人在线上)入手编写程序,能够消除学生的畏难情绪,使学生体会到编程成功的愉悦感, 帮助学生树立对本课“机器人沿线走”各种情况编程的信心。
2.机器人左偏与右偏
导:机器人转弯时会因为惯性偏离黑线,传感器的灰度值会发生怎样的变化呢?(学生交流讨论)
导:当机器人左偏时,左边的传感器在地图白色区域,右边的传感器仍在黑线上,对应的程序应这样编写。
(1)添加一个单分支控件,设置属性为“条件一:通道1的值>black;条件二:通道2的值≤black”。
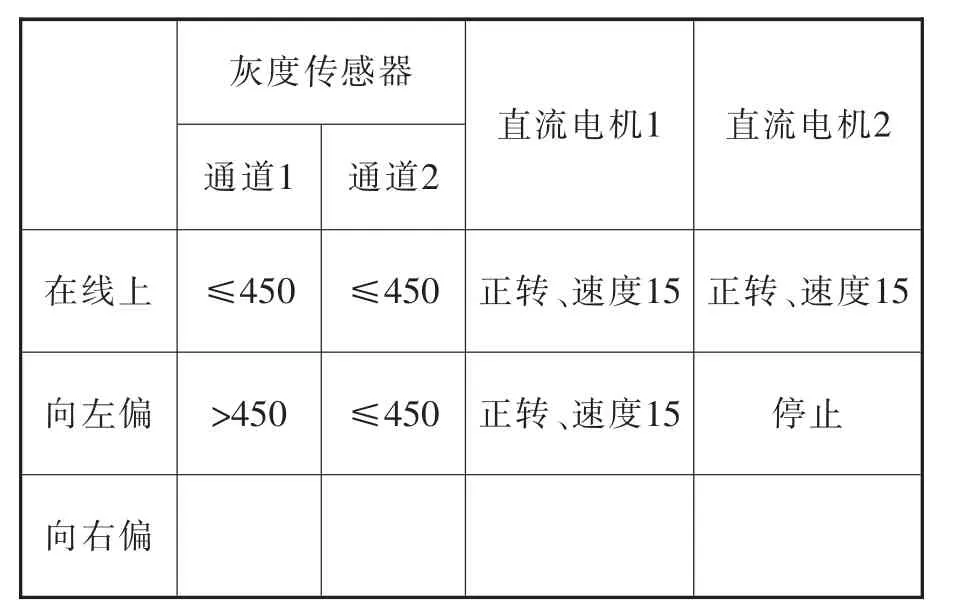
灰度传感器直流电机1 直流电机2通道1 通道2在线上 ≤450 ≤450 正转、速度15 正转、速度15向左偏 >450 ≤450 正转、速度15 停止向右偏
(2)在该单分支控件中添加直流电机控件,设置:直流电机1“正传、速度15”;直流电机2“停止”(如上表)。
做:学生独立编写机器人向左偏的程序。
导:那么机器人向右偏的参数值该如何设置呢?
议:(生交流讨论)设置通道1的值≤black;通道2的值>black;设置:直流电机1“停止”;直流电机2“正传、速度15”。
做:学生独立编写机器人向右偏的程序。
思考:这部分编程,引导学生从简单的行走方式过渡到较复杂的行走方式,给了学生更多自主操作的机会, 既锻炼了学生举一反三的实践应用能力,又培养了学生的创新思维能力。
3.机器人完全左偏与完全右偏
导:在向左偏和向右偏的情况下,机器人仍有半边传感器在黑线上;当机器人完全左偏时,左右传感器都在地图的白色区域,程序应这样编写。
(1)添加一个单分支控件,设置属性为“条件一:通道1的值>black;条件二:通道2的值>black;条件三:max=0”。
(2)在该单分支控件中添加一个直流电机控件,设置:直流电机1“正传、速度15”;直流电机2“反转、速度2”(图略)。
做:学生独立编写机器人完全左偏的程序。
导:那么机器人完全右偏时的参数值该如何设置呢?
做:学生交流讨论,参照机器人完全左偏的参数设置,自主合作编程。
思考:这样引导学生通过自主思考、交流合作,及时迁移运用已有知识解决问题,不仅提高了学生的编程技能,而且培养了学生的创新思维能力。
三、完成任务,检测评价
(一)运行程序并调整改进
完成全部编程后,让学生将编写好的程序下载到机器人主板上,保存并编译所有程序,然后运行程序,调试机器人行走,并根据机器人行走情况改进程序。
(二)开展竞赛并现场评价
教师组织学生进行一场机器人沿线走比赛。 在学生操控机器人进行比赛时,教师用事先准备的评价表对各组的完成情况进行现场打分。
(三)总结点评提出改进措施
教师对每个小组的项目完成情况进行详细点评,表扬表现突出的小组与个人,并指出各小组作品存在的问题,敦促学生加以修正和改进。
思考: 通过现场操作机器人行走, 一方面让学生分享各自的学习成果、 体验成功的喜悦;另一方面可以检验学生的编程效果,培养学生的反思意识。
四、教学思考与前景展望
开发与实施人工智能教育,是关系到为我国培养人工智能高端人才和优秀接班人的教育大计。 把任务驱动教学法应用于信息技术教学,不仅能让学生学会基础的机器人编程与操作应用技术,还能培养学生乐于探究、勇于创新的科学精神,为我国未来的科学技术发展培养合格的后备人才。
(一)有利于调动学生的学习积极性
任务驱动下的信息技术课堂,开启了以解决问题、完成项目为主的多维互动教学模式。 学生在强烈的问题动机驱动下,积极投入到合作、探索、思考和创新学习的活动中来,每个学生都处于思维极度活跃、精神高度集中的最佳学习状态,有利于充分调动学生的学习积极性和思维能动性。
(二)有利于培养学生的学习自信心
在学习任务驱动下,学生在完成一个较容易的任务后,再去完成下一个稍难一点的任务,这样由易到难、循序渐进地突破一个个项目,让学生更易于获得学习成就感,也有利于培养学生的学习自信心和科学探究的兴趣。
(三)有利于培养学生的科学创新意识
在任务驱动下的合作探究学习中,唤醒了学生的科学探究精神和创造发明意识,一旦科学的种子在学生心中生了根、发了芽,他们就会全身心地投入到科学探索中去,那么我国人工智能领域的研究与创新将会前程似锦!
猜你喜欢
科技与创新(2022年15期)2022-08-04
汽车实用技术(2022年12期)2022-07-05
北京航空航天大学学报(2022年6期)2022-07-02
电脑爱好者(2021年21期)2021-11-04
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中文信息(2020年10期)2020-11-30
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
