月球极区探测的主要科学与技术问题研究
2020-09-27 08:31:38吴伟仁于登云刘继忠唐玉华邹永廖马继楠周国栋卢亮亮
深空探测学报 2020年3期
吴伟仁,于登云,王 赤,刘继忠,唐玉华,张 熇,邹永廖,马继楠,周国栋,张 哲,卢亮亮
(1. 探月与航天工程中心,北京 100186;2. 航天科技集团有限公司,北京 100048;3. 中国科学院 国家空间科学中心,北京 100190;4. 北京空间飞行器总体设计部,北京 100094)
引 言
月球作为距离地球最近的天体,是人类深空探测的首选目标。人类已先后实施了约118次探测活动,先后有20多个探测器实施了月球正面探测。2019年,我国的“嫦娥4号”任务实现了月球背面首次探测。近年来,月球极区因矿产资源丰富、可能存在水冰,以及地理位置资源独特等因素,其科学价值和研究意义重大,正成为国际月球探测新的热点[1]。
月球极区分为南极和北极,相较于北极,月球南极具有最古老、最大、最深的撞击坑,科学研究意义更大。近年来,欧洲航天局(European Space Agency,ESA)提出了月球南极探测计划,在月球南极建立“月球村”;俄罗斯也制定了月球南极探测规划,拟通过“LUNAR-25”~“LUNAR-29”共5次任务的实施,在南极建立“月球基地”;印度在2019年实施的“月船2号”(Chandrayaan-2)在南极着陆失败后,又计划在2021年前后发射“月船3号”(Chandrayaan-3)任务,再次进行南极着陆探测;美国更是高度重视南极,2017年提出“重返月球”,2019年正式发布“阿尔忒弥斯”(Artemis )计划,要不惜一切代价在2024年实施月球南极登陆,并明确提出要主导国际探测的新格局。中国学者早在2012年就针对月球基地建设,提出了月球基地结构形式设想[2]。月球极区探测已成为航天大国竞相抢占的战略制高点。
开展月球极区探测,首先需要关注的是两个方面:一是月球极区需重点关注哪些科学问题;二是亟需突破和解决哪些关键技术问题,才能到达月球极区并实现科学探测目标。本文在这两方面进行了初步研究,目的是促进未来中国月球极区探测项目实施。
1 极区探测的主要科学问题
根据“嫦娥2号”(Chang'E-2,CE-2)探测器获取的高分辨率全月图和美国“月球勘测轨道器”(Lunar Reconnaissance Orbiter,LRO)长时间探测的结果发现,月球极区地形地貌复杂,存在永久阴影区的撞击坑众多。这些撞击坑内,很可能存在水冰[3-4]。比如,月球南极分布着大大小小几十个撞击坑,大部分撞击坑直径在10 km以上,深度达3 km左右。根据黄道面、白道面推算,月球极区存在长达100多天的连续光照区,这都是月球极区特有的环境条件。
与中低纬度地区相比,月球极区还存在一些特殊的需要深入研究的科学问题,主要包括月球水冰及挥发组分来源与分布、月球深部物质与内部结构、月球形貌构造和撞击历史、近月表环境及其过程、月球金属矿产和稀有气体资源等方面[5-6]。
1.1 月球水冰及挥发组分来源与分布
关于月球水和挥发组分的学术争论主要在两个层面:第一层面是月球中的水和挥发组分特别是其早期含量问题,涉及月球“干湿论”之争、月球的起源与演化、岩浆洋理论体系等重大科学问题,其中月壤中的挥发组分还涉及漫长的月球演化历史中,太阳风和宇宙射线与月面表层物质相互作用等学术难题(图1),而且月壤中的挥发组分还是未来月球资源开发利用的重要对象;第二层面是关于月面永久阴影区是否有水(冰)存在及其赋存状态、含量、分布和来源的科学问题,而这一问题尽管目前理论上和间接测量上认为月球永久阴影区确实存在水(冰),但直接的测量证据及其赋存状态、含量、分布、来源等都没得到解决。就月球资源利用和开发而言,月球永久阴影区水(冰)是未来月球基地重要的战略资源。因此,月球中的水和挥发组分及其在永久阴影区水(冰)存在与否等系列关联问题一直是国际学术界研究的热点和未来工程任务的探测重点[7-9]。月球南极分布着大量的撞击坑,其中很多区域属于永久阴影区,是揭示上述科学难题和评估未来资源的重要场所。由于之前的探测和研究是基于轨道遥感中子谱仪、合成孔径雷达、光谱仪等技术手段,只能得到阴影区存在水冰的间接证据,且难于判断其存在的深度和赋存状态等,无法从根本上解决上述系列问题。
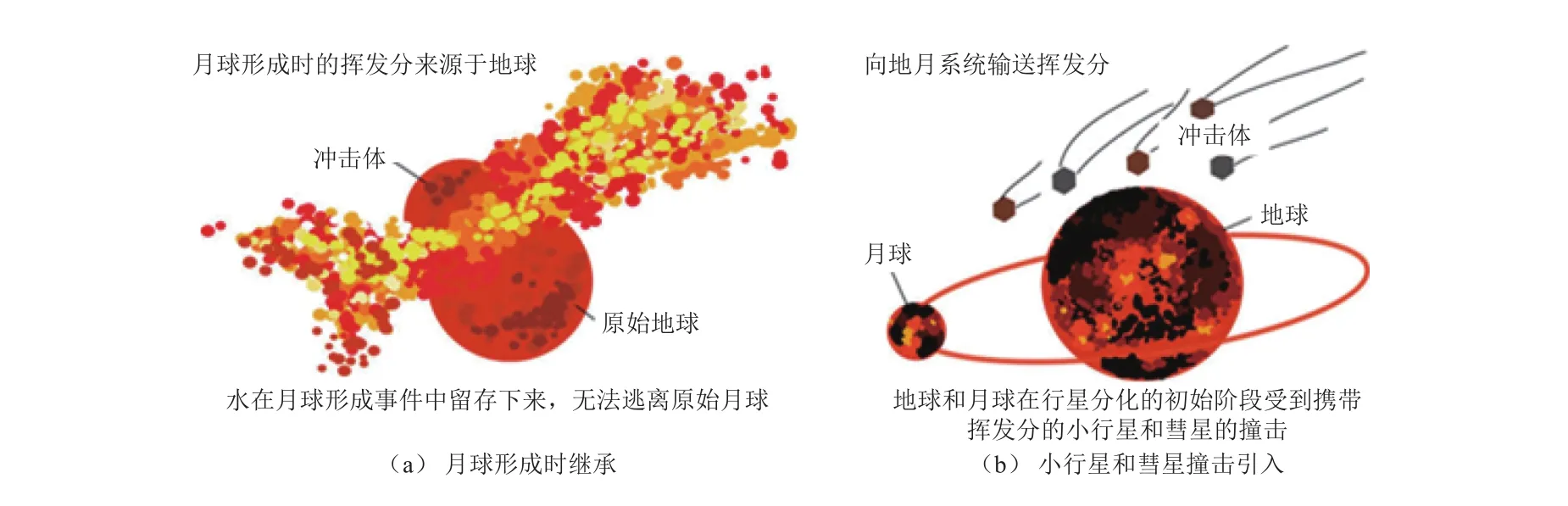
图1 月球水和挥发分的来源机制Fig. 1 Source mechanism of lunar water and volatiles
如果使用更先进的高精度中子–伽马谱仪、合成孔径雷达,同时对永久阴影区原位直接测量H2O分子及其H同位素,不但能直接证认水冰的存在并揭示来源,而且可通过原位测量结果与全月面永久阴影区遥感探测结果的对比分析,从而获取月球阴影区水冰的分布、含量,评估其储量及其未来战略资源开发利用价值,再结合月球样品中水和挥发组分的实验室精细测试分析和研究,不但对解决上述系列科学问题有重要意义,进而为月球的起源、岩浆洋理论和月球“干湿论”等这些重大科学命题的研究提供关键证据和条件约束。
1.2 月球深部物质与内部结构
月球深部物质和内部结构是理解月球起源和演化的核心要素,也是目前月球科学研究最为薄弱的环节。月球南极–艾特肯盆地(South Pole-Aitken Basin)是月球上最古老、最大和最深的撞击盆地[10],提供了研究深部物质的天然地质剖面。该盆地地势较低且月壳较薄,有可能挖掘出深部物质乃至月幔物质。虽然该区域表面可能有月海玄武岩覆盖,但后期形成的撞击坑又可能重新将较新鲜的月幔物质暴露出来[11]。因此对月球南极区域的探测,获取该区物质成分特别是来自艾特肯盆地成坑期间溅射物信息,有望获取到下月壳甚至月幔物质特性,对精准揭示月壳早期成分及其构造演化具有重要的科学价值。由于尚无法通过遥感手段直接获得准确的深部物质成分,也没有采集到月球深部的岩石样品,目前对月球深部物质和内部结构特性的认识主要来自早期月震、月球重力场的探测和理论模型反演的结果。月震的探测仅限于Apollo时期在月球正面布置的几个观测点[12],特别是由于阿波罗时代的地震仪性能的局限性,对月球全球的内部结构研究结果越来越多地受到质疑,如阿波罗时代得出的探测结果认为月核半径约为700 km,20世纪90年代得出约为400 km,而最新的研究则表明可能只有200 km。此外,由于月球南极地块是月球大地块中可能最古老的地质体,人类从未在该区进行过着陆与巡视就位探测,月球极区是研究月壳早期物质成分特征及其演化历史的理想场地(图2)。
利用探测器对该区物质成分进行精细的就位探测和月震的长期连续测量,结合月球返回样品的实验室测试分析,可以获取原始月壳物质特性、月球深部物质特性和内部圈层结构特性,重现月球南极区域地质演化历史,进而揭示月球化学成分的演化进程。
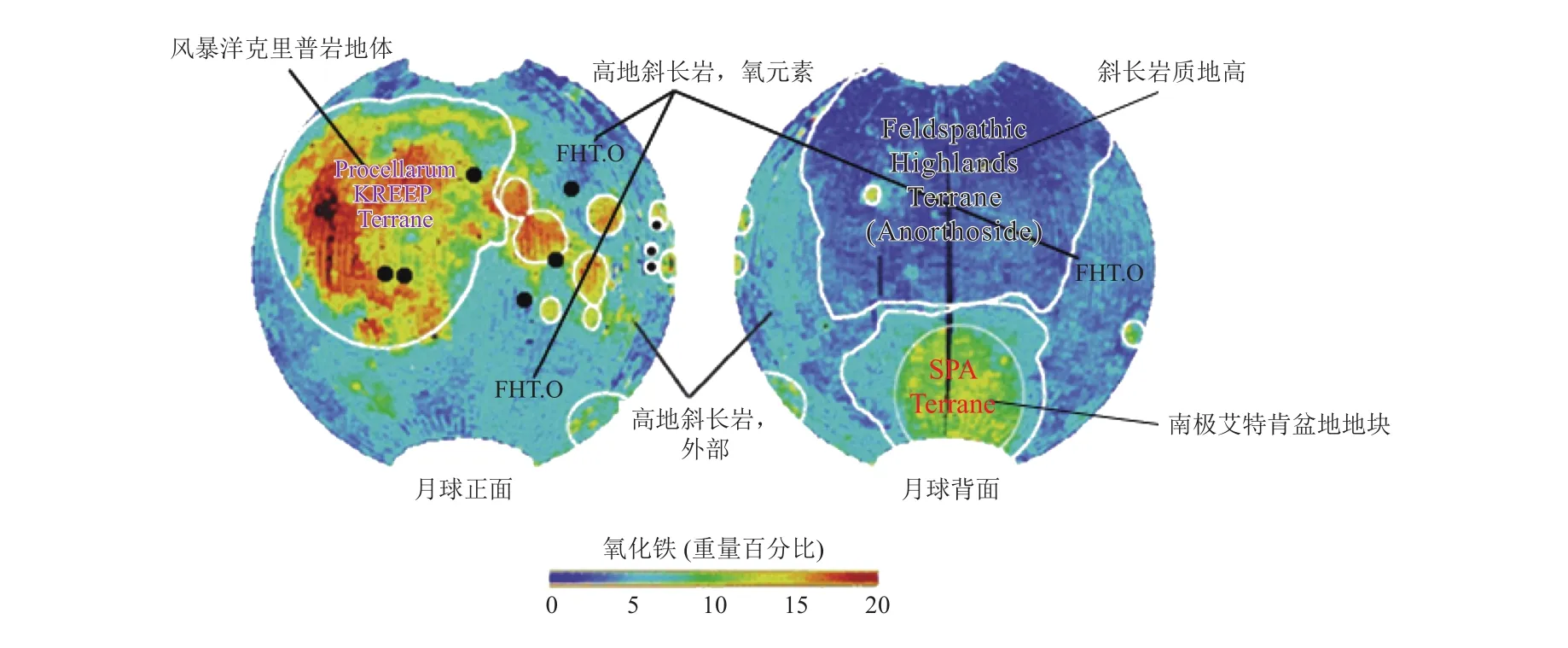
图2 月球三大地体:风瀑洋KREEP地块、斜长岩质高地、南极–艾特肯盆地地块分布及特征Fig. 2 Lunar geotexture distribution:procellarum KREEP terrane,feldspathic highlands terrane,SPA terrane
1.3 月球形貌构造和撞击历史
小天体撞击是太阳系早期普遍和重要的事件,对地球、火星等行星的环境和演化产生了重大的影响。由于长期和强烈的地质作用,地球早期的撞击痕迹已基本被抹除。月球南极–艾特肯盆地不但是太阳系类地行星中的最大和最深的撞击盆地,也是全月面撞击坑分布密度最大的区域,而且相对于地球、金星、火星等类地行星,月球是地质构造演化程度最低的天体,保留了早期地质构造的遗迹,不但是研究月球早期构造、撞击历史以及撞击影响的绝佳场所(图3),而且是研究太阳系类地行星早期地质构造特征、演化历史和撞击历史的天然标本。特别地,根据目前利用撞击坑统计定年分析结果,表明南极–艾特肯盆地的撞击年龄有可能是在40亿年左右,这对揭示目前困扰学术界关于太阳系40亿年前后为撞击高峰期的科学问题具有重要的启示[13-14]。
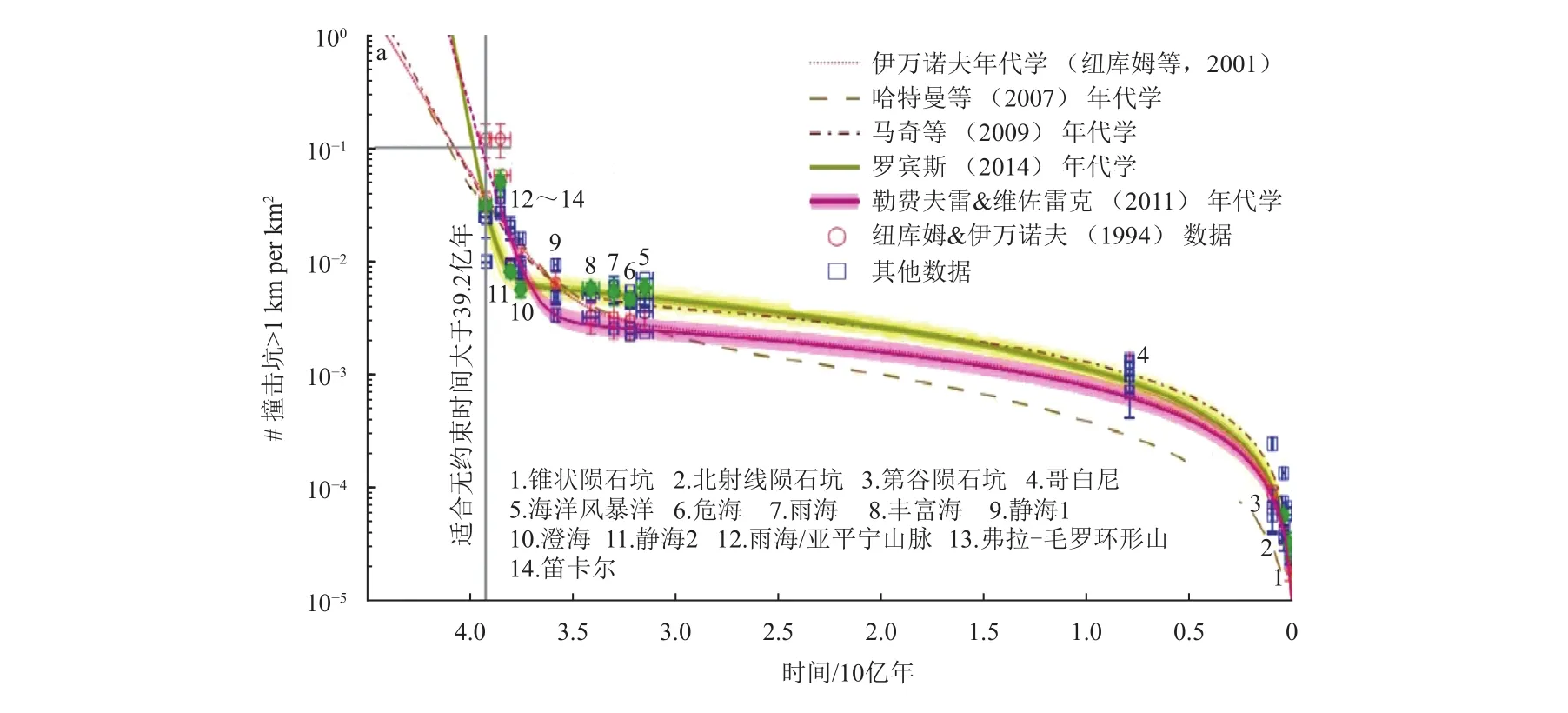
图3 月球撞击年代曲线与地质事件[15]Fig. 3 Lunar impact flux curve and major geologic events[15]
此外,由于月球南极的撞击坑中有很多区域是永久性阴影区,此前对其地形地貌、地质构造的信息少且精度不够,大大影响了对该区形貌构造的了解。利用高精度遥感光学相机和雷达,以及着陆区的光学相机和雷达,以就位和巡视的方式联合开展探测,能够获取月球南极全覆盖的形貌构造、撞击坑及其分布特征,结合物质成分的探测结果,可全方位再造月球早期形貌构造演化历史和撞击历史。
1.4 近月表环境及其过程
月表环境不但是月球科学研究领域重要的科学问题,而且也是未来人类、机器人月面作业需要了解的关键参数。本文探讨的月表环境特指月表电磁场、尘埃、等离子体和粒子辐射,这些环境特性涉及许多微观物理过程,主要有太阳风粒子和宇宙线在月面的溅射/反射、月面带电与等离子体鞘层、带电尘埃的动力学过程、带电粒子与月面物质的作用等(图4)。这些过程不仅与入射的粒子、辐射状况有关,还涉及局部的形貌、磁场等地质条件。只有在月面开展原位测量,才能深入了解其本质。开展对月球环境的探测和研究,有助于人类进一步认识月球与太阳风、宇宙线等相互作用的基本物理规律,还可以服务于人类探索月球的航天活动,为生物在月球生存,航天装备的安全保障等提供必要的环境要素。

图4 近月面空间环境及其过程[16]Fig. 4 Lunar surface space environment and its processe[16]
利用月表等离子体参数的探测数据,有助于了解太阳风、磁尾等离子体与月表相互作用的过程和特性[17],确定月表等离子体环境的形成机制及其与太阳活动和月面地质条件的关系,结合月表电磁场的探测,研究太阳风与月表磁场的相互作用机理;通过对月表带电尘埃的探测,结合等离子体参数的探测,有助于研究着陆区局部月面电场及其对月尘动力学过程的影响,确定月表电场的分布以及尘埃等离子体迁徙的规律,研究月表电场以及尘埃悬浮和输运的机制;通过探测月球表面粒子辐射环境,与电场仪探测结果综合分析,有助于揭示月表局部高压带电环境的形成机制,进而探索可能的月尘喷发的诱因[18-19];通过月球附近等离子体、高能带电粒子、电磁场的观测,获得月表溅射粒子的特征,有助于研究月球稀薄大气成分的逃逸机制。
1.5 月球金属矿产和稀有气体资源
月球蕴含着丰富的各类资源,除了上述介绍的在月球永久性阴影区可能存在大量的水冰外,还含有月面物质赋存的海量的金属矿产资源和稀有气体资源等。月球分布有22个月海,其覆盖了厚厚的一层月海玄武岩,根据阿波罗样品分析表明,月海玄武岩(特别是高钛玄武岩)中钛铁矿的含量极高,而且开采钛铁矿的副产品—水和氧气也是未来月球科研站的重要战略资源。月球几乎没有大气,太阳风直接注入,稀有气体特别是氦–3等赋存于月壤中。根据阿波罗样品的分析表明,不同成分的月壤,其稀有气体的含量和赋存状态都不一样。氦–3还可以作为一种可长期使用、清洁、高效、安全的核聚变发电燃料[20]。有专家初步估算,月壤中氦–3的储量高达500万t,若能实现商业化利用,可供地球能源需求达数万年[21-22],是未来月球资源开发利用的重要战略资源。
利用遥感技术,在对月球南极矿产资源进行普查的基础上实施就位精细勘查,进而开展稀有气体资源的就位分析和提取试验,可为未来月球资源开发与利用提供重要的科学依据和技术支撑。
2 主要技术问题
要解决月球极区的上述主要科学问题,不仅需要采用月球环绕探测,还需要开展月球极区着陆、巡视或飞跃等多种探测活动。鉴于极区复杂地形环境和特殊地理位置,要能够适应极区光照、温度、地形等特殊环境,探测器和载荷在工程实现上需要突破一系列关键技术,主要包括极区精细勘察、狭小区域的精准着陆、阴影区到达、长期能源供给、多目标测控通信、资源开发利用、极端环境下长寿命、地面试验验证等多项技术[22-24]。
2.1 极区精细勘察
月球的极区,并没有严格的定义。如果比照地球的划分方法,是指南北纬66.5°以上地区。实际上,考虑月球白道与黄道的夹角,真正可能存在永久阴影坑、真正具有“极夜极昼”现象的地区,应该在南北纬86°以上[25]。而这些地区,太阳高度角很低,目前的光学遥感探测效果并不好,激光、微波等方式获得的探测结果往往分辨率也不够高。因此,目前对极区的地貌环境的探测数据颗粒度较大,缺乏详细和精细的极区地貌环境探测数据。为获取地形地貌的精细科学数据以及开展精准着陆探测和后续资源开发利用,需要对极区实施大范围精细勘察,详细了解极区地貌环境、矿物组成、水冰等资源分布等。如何实现对极区精确勘察是一个需要优先突破的技术难题。
对极区实施大范围精细勘察,需在月球轨道布置环月器进行低轨精细勘察。极区精细勘察技术主要涉及轨道器的系统总体技术、高精高稳控制技术、高分辨率的光学和雷达探测技术等内容。
2.2 狭小区域的精准着陆
月球极区,遍布大大小小的撞击坑,且撞击坑内部坡度较为陡峭[26],地形起伏较大,而太阳高度角就只有1°~4°。这样的地形和光照条件,使选择满足地形、光照、科学探测等各方约束条件的着陆区变得极端困难,即可供着陆的区域非常有限,必须实现精准着陆。如果着陆点偏离百米以上,就可能造成探测器着陆后处于无光照的困难境地,甚至不能安全着陆。因此,在狭小区域的高精度着陆控制,是极区探测必须解决的关键技术。
我国“嫦娥3号”“嫦娥4号”任务实现的软着陆探测,基本是依靠惯性导航加对月测距测速和局部地形识别避障的方式。其中轨道倾角控制偏差、主发动机推力偏差会给着陆精度带来较大的影响,一般着陆精度在千米量级[27]。而在极区着陆则需要保证百米量级的着陆精度,因此,需研究基于图像匹配或基于信标导航的更高精度着陆控制技术(图5)。图像匹配方法的核心是:在主减速段是通过图像导航的方式,不断预报落点偏差,通过调节发动机推力实现落点偏差修正;在着陆末段,通过图像识别和避障算法,实现安全着陆。信标导航方法则是通过先在月面设置无线电信标,然后着陆器着陆过程与信标通信,实时获取相对信标的三维坐标,在信标的导引下实现定点着陆。信标导航方式的着陆,更适合后续月面多探测器着陆到较接近的区域,开展联合探测。
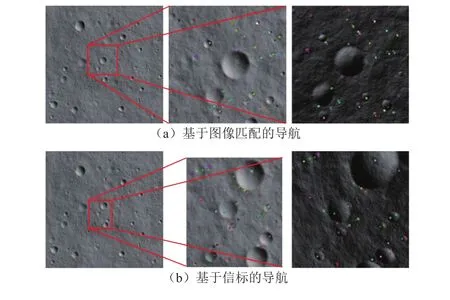
图5 图像匹配导航过程示意图Fig. 5 Schematic diagram of image matching navigation process
2.3 阴影区到达
永久阴影区多位于月球极区一些较深撞击坑的底部(图6),由于太阳高度角较低和坑壁的遮挡,使其终年处于无光照的条件。目前,利用LRO和“月亮女神号”月球探测器的(SELenological and ENgineering Explorer,SELENE)的探测数据,对月球南北极可能存在的永久阴影坑有了较好的预测[28],但由于阴影坑恶劣的条件,使人类的探测器还未能涉足开展就位探测。阴影坑内部的地形地貌、物质成分、水冰以何种形式赋存等科学问题,都是亟待解决的难题。而要解决这一难题,最有效的方式是探测器到达阴影区,开展原位精细探测。
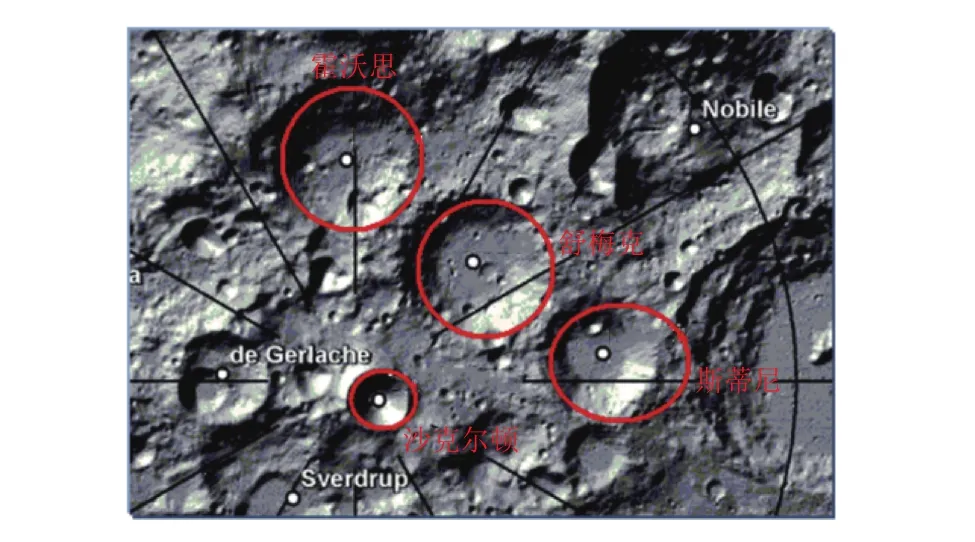
图6 月球南极具有多个永久阴影区的撞击坑Fig. 6 Impact craters with multiple permanently shadowed areas at the south pole of the moon
但阴影区的到达,相比月球上其它地区的到达,具有更大的难度。首先,阴影坑的坑壁坡度一般达到30°~40°[29](图7),一般的月球车很难在坑壁上移动;第二,阴影坑内部,没有光照,着陆时无法采用光学成像进行导航避障,必须采用激光或者主动照明技术,而阴影坑内部物质对激光和可见光的反照率存在不确定性,也给导航敏感器的设计带来挑战;第三,阴影坑内部,由于可能存在水冰,其月壤的特性与中低纬地区会有较大差异,受水冰丰度的影响,土壤力学、化学特性也会有所不同,这对于着陆缓冲以及着陆后的钻取等工作也会带来很大的困难;第四,永久阴影区内部,由于常年没有太阳辐射,其内部温度可能低至约40 K[30],探测器面临的是无光照和极寒的温度边界。

图7 月球探测辐射计测得的月球南极范围内的表面温度分布图(80°S至南极点)Fig. 7 Surface temperature distribution in the south pole of the moon measured by lunar probe radiometer(80° s to the south pole)
采用低空飞跃技术研制飞跃探测器,也许可有效克服传统的巡视探测无法到达撞击坑内的问题。飞跃探测器可在月面光照区起飞,飞至撞击坑内的永久阴影区内,通过表面移动或飞跃,对可能存在水冰的区域开展原位多点探测。但是,研制飞跃探测器涉及的关键技术众多,需要重点研究和突破低空飞跃探测制导与控制、高比能量锂离子蓄电池、电子信息模块高集成轻小型化、极低温环境下新型热控、轻小型可重复主动缓冲/移动机构等技术。
2.4 长期能源供给
月球极区在光照区,太阳高度角只有几度(图8),在月面的辐照度只有0~38 w/m2[31],月面温度在100~160 K左右,而且永久阴影坑没有太阳能可以利用。这些均给极区探测器能源的供给带来更大挑战。尽管如此,太阳能仍是必须有效利用的最主要的能源,而且采用太阳帆板竖立并跟踪太阳的方式,应尽量提高太阳入射角度,以获得有效的发电能力;同时,同位素热源、同位素电源,作为提供热能和电能的有效手段,在极区探测中仍然可发挥重要的作用,但要实现在诸如南极的月球极区开展长期探测,能源供给仍是需要优先解决的关键技术。
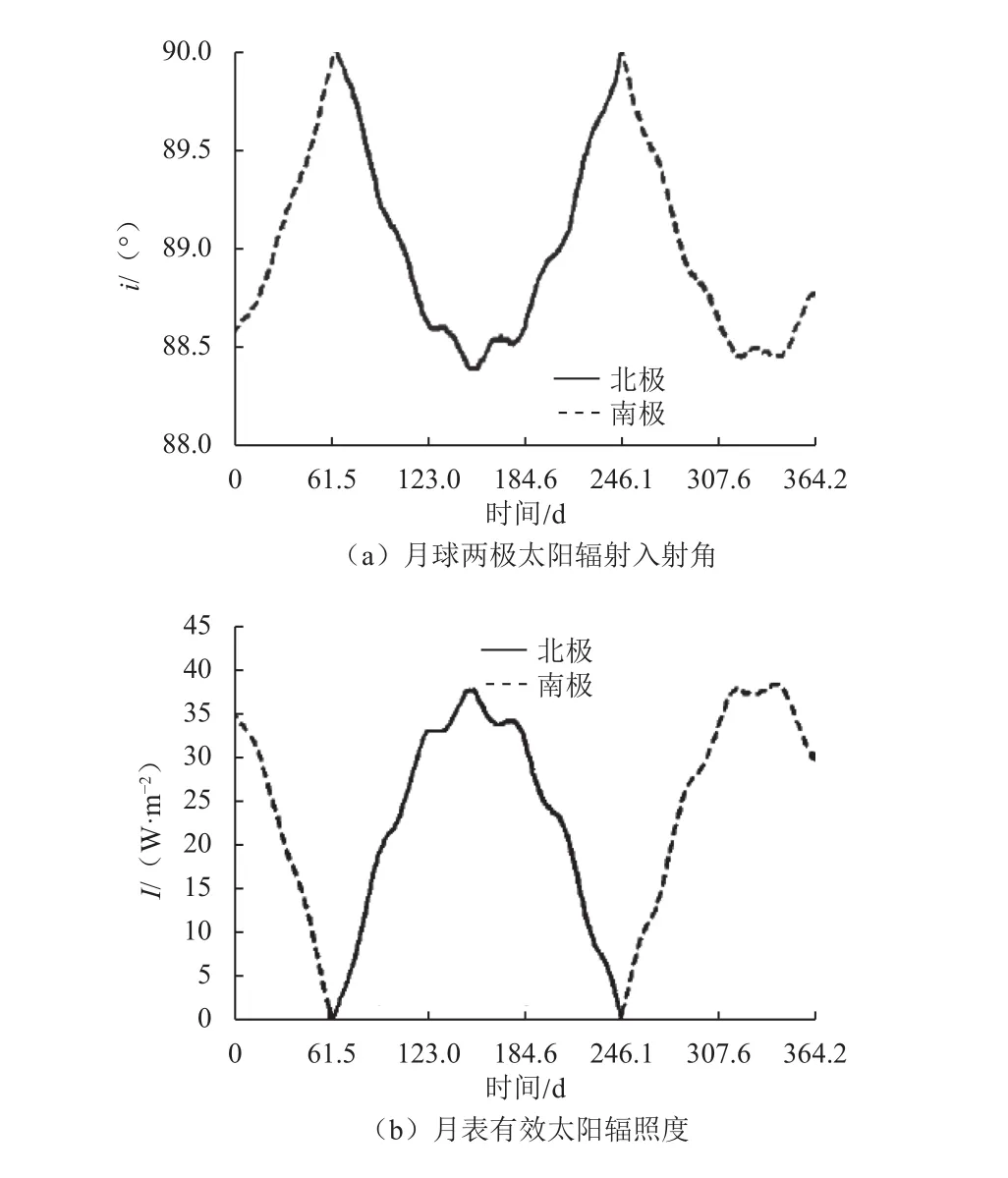
图8 月球两极太阳辐射入射角和月表有效太阳辐照度的时间变化Fig. 8 Time variation of the angle of incidenced of solar radiation at the poles of the moon and time variation of effective solar irradiance on the moon surface
解决长期能源供给,重点需在两方面下功夫:一是提高现有能源技术效率,包括如何提高热能的利用效率,提高热能转化为电能的效率,实现热电综合高效使用等;二是开发新型能源或新型传输技术,包括无线能量传输技术等。
2.5 多目标测控通信
月球极区探测可以采用中继星、轨道器、着陆器、飞跃探测器和巡视器等多个探测器联合工作的方式,因此,随着后续任务的实施,将有多个工作在环月轨道和月面的探测器。另外,在月球极区,不同于月球正面的大多数地区,由于月球的自转、天平动的影响以及局部地形影响,月球极区几乎不存在可以持续对地通信的区域,对地可见的高度角也往往只有几度(图9)。因此,如何利用有限的地面测控资源有效地对多个目标进行操作和管理,对各器进行控制、状态监视、定轨定位和协同操作,将是未来月球极区探测工程实施必须面对和解决的全新课题。

图9 极区对地通信条件分析Fig. 9 Analysis of communication conditions between the polar region of the Moon and the Earth
利用在月球轨道布置中继星,实现极区与地球间测控通信,是提高工作效率的有效途径。但需重点研究中继星的轨道选择、通信频点选择、中继转发方式、多通道实时支持能力等,综合通信量、可见弧段、资源需求等给出优化的设计。同时要认真开展月面多器协同操作控制和管理技术进行研究,以确保在任务期间合理分配测控资源、提高多器联合操作的可靠性和协同性[32]。
2.6 资源开发利用
月球极区的资源,广义上说可以分为3类:位置资源、物质资源和信息资源。位置资源,是指月球在地月系中特殊的位置,可以使它成为监测地球、监测地外天体的一个有效窗口;物质资源,是指可能存在的有用矿物、水冰、氦–3等物质成分,可以为人类的可持续发展提供资源和能源补充;信息资源,是指月球在太阳系、地月系的演化过程中,可能保存了更古老更有用的信息,可为空间科学等基础学科的研究提供宝贵的依据[33],月球基地建设如图10所示。
图10 月面建设示意图Fig. 10 Schematic diagram of lunar surface construction
这些资源的开发利用,需要研究不同的探测和开发手段。例如用于对地球进行宏观观测的望远镜、辐射计、用于月球深部结构探测的月震仪、用于稀有气体提取的试验装置、用于月面水、氢、氧制造的装置、用于月壤就位制造构件的原位成型装置等。这些资源开发利用装置,需要满足月球极区特殊工作条件的轻小型、耐低温、低功耗、高可靠的要求[34]。
2.7 极端环境下长寿命
未来月球极区探测通常要考虑建立月球科研站或月球基地,开展长期持续探测。因此,相比于以往探月工程任务,探测器的寿命可能需大幅增加至8~10年,探测器将面临月球极区极端环境下长期服役、月面自主任务管理和生存管理等诸多挑战,特别是极低温、1/6 g重力、月尘影响等极端环境下高可靠元器件和长寿命执行机构将是影响成败的决定性因素之一。但当前尚未建立月球极端环境下元器件和执行机构的质量与可靠性数据体系,缺乏极区恶劣环境下机构产品可靠性数据融合分析及利用方法,缺少信息化工程研制管理和产品实现的工具平台,亟需开展极端环境下长寿命相关研究工作。
极端环境下长寿命技术研究,应以长寿命执行机构、高可靠元器件为研究对象,针对极区环境特点分类采集质量与可靠性数据,通过多源数据融合,开展可靠性评估和寿命预测、评价和质量一致性控制与评价等数据利用技术研究,形成支持后续月球探测器高可靠性长寿命设计的工程平台。重点突破月球探测器质量与可靠性数据分析、多源质量与可靠性数据融合和极端环境数据处理及关键机构产品可靠性分析等关键技术,立足型号应用,优化数据项识别、采集、传递和管理模式,充分提取和利用研制试验数据和已有探测器产品数据,针对极低温、微重力等特殊环境,建立数据融合、可靠性评估与寿命预测、质量一致性控制等模型,支撑月球极端环境下典型元器件和关键机构产品薄弱环节识别和改进设计。
2.8 地面试验验证
为确保探测器在轨可靠工作,必须研究地面试验验证技术,实现地面验证的充分和有效。对于极区探测器,相对“嫦娥3号”“嫦娥4号”已经形成的试验方法和具备的地面验证条件[35](见图11),主要应补充的试验技术研究主要体现在4个方面。
一是深冷低温环境下探测器的生存试验,需要模拟阴影坑内部40 K左右的温度边界,考察探测器热控系统的能力和舱内外设备的温度水平。这样的热真空试验装置,不能再使用以往的液氮热沉,而必须采用液氦流程,实现温度边界的有效控制。
二是深冷低温下月壤钻取技术验证。不同的温度条件,不同的水冰含量,不同的月壤颗粒级配,对月壤的钻取力学特性有较大影响。为验证探测器在阴影坑内的取样能力,必须在地面对取样装置开展相应的模拟试验,获取钻取机构与月壤相互作用的特性。同时,为尽量保证取样过程不破坏水冰的原有赋存状态,应开展低温采样地面验证技术的攻关。
三是羽流与探测器、与月壤的相互作用的试验验证。发动机工作,羽流会对探测器、月面形成力、热、污染等作用[36]。不同的探测器构型,不同的月面条件,相应的作用效果不同。应在数值分析的基础上,研究相关试验技术,模拟真实在轨环境,获得尽量真实的测量结果,以支持在轨程序的优化。
四是探测器长寿命高可靠验证技术。在月面长期工作的探测器,面临更为恶劣的环境。为满足未来月球极区探测工程任务的需求,要求工作寿命长达8~10年。在地面,如何验证各设备的长期工作能力,需分析影响寿命的敏感因素,构建寿命评价指标体系,建立加速寿命试验方法,从而既有效又经济地实现探测器寿命的地面验证。

图11 着陆地面试验场Fig. 11 Ground test site for lunar landing
3 结束语
开展月球极区探测,尤其是开展极区水冰及挥发分、极区地貌环境、月球深部物质与内部结构等科学问题研究,是深化月球科学研究的必由之路。突破极区精细勘察、精准着陆、阴影区到达等多项技术,既是解决月球极区主要科学问题的必要手段,也是实现我国空间技术跨越发展的重要途径。
本文结合当前国际月球科学问题研究热点,细致梳理和分析了月球极区实施探测的主要科学和技术问题,旨在为后续开展研究、引领月球探测可持续发展抛砖引玉。
猜你喜欢
东坡赤壁诗词(2022年4期)2022-10-30 12:18:17
环境技术(2021年2期)2021-07-03 14:54:00
文苑(2020年11期)2020-11-19 11:45:11
火力与指挥控制(2019年11期)2020-01-08 03:33:10
中国诗歌(2019年6期)2019-11-15 00:26:47
文萃报·周二版(2019年3期)2019-09-10 07:22:44
大众科学(2019年1期)2019-04-09 01:37:32
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
中国惯性技术学报(2015年1期)2015-12-19 13:11:49