月球极区钻取采样技术
2020-09-27 08:31:54刘德赟张加波孙启臣赖小明
深空探测学报 2020年3期
刘德赟,张 熇,杨 帅,殷 参,张加波,孙启臣,赖小明
(1. 北京卫星制造厂有限公司,北京 100094;2. 北京空间飞行器总体设计部,北京 100094)
引 言
我国探月工程“绕”“落”“回”三步走的任务即将完成,并已开始规划月球四期探测任务,计划于2021—2030年针对月球南极执行3次无人探测任务,以增进对月球的了解,加强技术储备,希望在月球南极建成“月球科研站”基本型,作为人类地外天体开发活动标志性的重大工程,推动国际月球大科学计划,成为全人类太空开发的重要共享平台。
月球极区的资源,特别是水资源的分布及其存在形式是月球探测的重要科学目标之一,探寻水的存在对月球科研站的建立以及后续深空探测任务具有重大意义[1]。按照现有论证规划,“探月四期”工程第1次任务将对月球南极进行物质成分就位探测普查,特别是将选取永久阴影区内部作为探测区域,验证水资源存在于月球的科学推测。探测手段拟采用飞跃探测器进入永久阴影区,使用其上搭载的原位采样机具采集月壤样品,通过自身携带的科学仪器进行就位分析;“探月四期”第2次任务将对月球极区进行样品采集并带回地球用于科学研究,作业方式拟继承“探月三期”“嫦娥5号”,并在现有技术状态基础上针对极区低温环境、复杂对象等特征对产品进行适应性改进。
上述两次工程任务,都需要开展针对月球极区的采样技术研究。本文将针对“探月四期”任务采样技术需求,通过分析月球极区环境及采样对象特点、梳理月球极区采样作业关键技术,并结合国内外相关研究进展情况,提出适用于搭载飞跃探测器进行永久阴影区成分普查的原位采样技术方案和适用于着陆区次表层样品返回的钻取采样技术方案,为我国“探月四期”任务论证及工程实施提供方案参考和技术支持。
1 月球极区钻取采样任务分析
1.1 极区钻取采样作业特殊性
相较于月球中低纬度采样任务,月球极区采样作业有其特殊性,主要表现为环境更为恶劣、对象更为复杂,这使得采样任务实施也更为困难复杂。
1)极端温度环境
由于地形、地貌等条件的影响,极区光照分布很不均匀:虽然高地地区光照较为充足,但太阳高度角小,阳光斜射,造成该区域长期处于低温环境,普遍温度约在–170~–110 ℃,最高温度也在–60 ℃以下;而在陨石坑底,则存在终年不见阳光的永久阴影区,温度较极区高地更低,属于极冷环境。美国月球勘测轨道飞行器(Lunar Reconnaissance Orbiter,LRO)携带的Diviner载荷对月球极区陨石坑底永久阴影区进行内部探测时发现,在南极最黑的陨石坑里观测到最低的夏季温度大约是–238 ℃,而北极的赫米特陨石坑(Hermite Crater)在隆冬时节的夜间,其底部西南边缘温度最低可达–249 ℃,堪称太阳系内最冷的地方[2-3]。
图1(a)(b)展示了月球接近南极夏至时通过LCROSS观测和模型计算得到的月球南极地表和次表层温度特性结果。其中图1(a)为日间辐射热亮度温度,图1(b)为夜间辐射热量度温度。
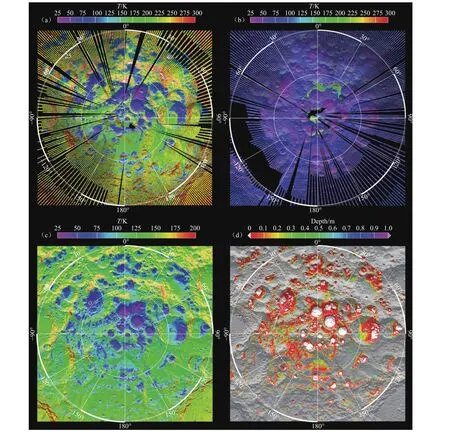
图1 观测和模型计算得到的月球南极月表和次表层温度特性[4]Fig. 1 Maps of measured and model-calculated surface and subsurface temperatures in the lunar south polar region[4]
2)复杂作业对象
月球中低纬采样对象以散体月壤为主,作业过程可能遇到颗粒状或块状月岩,对象相对单一。而根据最近的月球探测结果推测,在月球极区极有可能有水存在,其赋存形式可能为冰与月壤的混合态,也可能是以水冰或结合水的形式存在。由于水可能以多种形式存在,意味着极区采样作业对象将不仅仅局限于无水散体月壤或月岩,还可能包括冰壤混合物、吸水岩石和纯冰等多种物质形态[5-6]。确定剖面星壤的性质与含水量和组分之间的关系对于采样任务实施至关重要。
图1(c)展示了极区年平均月表温度的模型计算值,图1(d)展示了水冰冻土可能存在的区域位置。其中白色区域为水冰目前可能赋存于表层的位置,彩色区域为月球冻土可能存在于上表层的区域,灰色区域由于次表层温度较高,1 m深度内不太可能有水冰存在。此外,月球极区地形复杂、物质分布不均匀、光照条件苛刻等客观因素,也是采样作业需要面对和解决的问题。
1.2 极区钻取采样关键技术分析
基于极区采样任务的特殊性,一系列关键技术需要突破,才能保证采样作业的成功,具体包括以下几个方面。
1)适用于低温冻土类月壤的钻取、封装执行机构设计技术
由于极区环境和采样目标的特殊性,作业执行机构的采样深度、环境适应性、样品科学信息保存能力和多次作业能力都需要特别关注。
根据中子光谱仪观测结果推测,约有30亿t水冰埋藏于月球极区陨石坑底0.5 m深度以下,而在坑边高地上一定深度也可能埋藏有水。这意味着要实现验证水存在的科学目标,取样机构需具备表层以下一定深度的取样能力。对于“探月四期”工程第1次任务,搭载于飞跃探测器的取样机构至少需具备永久阴影区坑底表层以下大于0.5 m深度的取样能力,而对于探月四期工程第2次任务,搭载于着陆器的取样机构应具备着陆区米级以上次表层取样能力。
由于水存在的可能性,在同一采样剖面可能要面临无水月壤、冻土类月壤、水冰、月岩等多种对象。这些对象的力学特性差异很大,要求作业机具要有极强的对象适应性。此外由于极区极端的低温环境,要从材料选用、热控设计、实验验证等多个方面开展工作,保证采样作业机具在低温环境能够生存并正常开展工作。基于我国目前地外天体采样产品的技术状态,这是一个全新的极具挑战的命题。
由于采样的最终目的是服务于科学研究,无论是供原态分析用还是供返回地球用,样品获取过程要尽可能保存原态科学信息,不对样品产生过多的扰动和破坏,同时需要采用合理可行的封装方法,确保样品在转移过程中科学价值得以保存。
对于极区第1次任务,飞跃器将进入永久阴影区进行多点探测,其搭载的采样机构也需要具备多次采样能力。对于每次采样,都需要样品获取、封装、转移全链路功能独立完整,不能发生混样情况干扰科学分析。同时要求采样机构轻小型化,在不增加重量代价的情况下满足功能复用要求,这对机构设计提出了更高的要求。
2)低温对象钻进规程设计技术
由于极区采样对机构表层以下一定深度样品获取能力提出了要求,钻进采样方式应被重点考虑。在钻进过程中,钻头对月壤的切削作用,会产生一定的热量,使温度明显升高。虽然在极区低温环境下,温升不会对机构本身产品致命影响,但有可能破坏样品的原态信息。极区采样极有可能面临以固态存在的低温含水对象,根据水的相变特性(图2),在真空环境下约–70 ~ –60 ℃时会发生气态与固态间相变。当钻进热量累积使温度超过其相变温度,冻土中的水会发生气化。气化后的水在扩散过程中,由于低温月壤和环境温度的影响,气态水会再次凝华固化。这个过程不仅会使样品科学信息受损,也可能发生粘钻冻钻影响钻进作业。因此钻进过程中的相变是冻土类月壤钻进的风险之一。
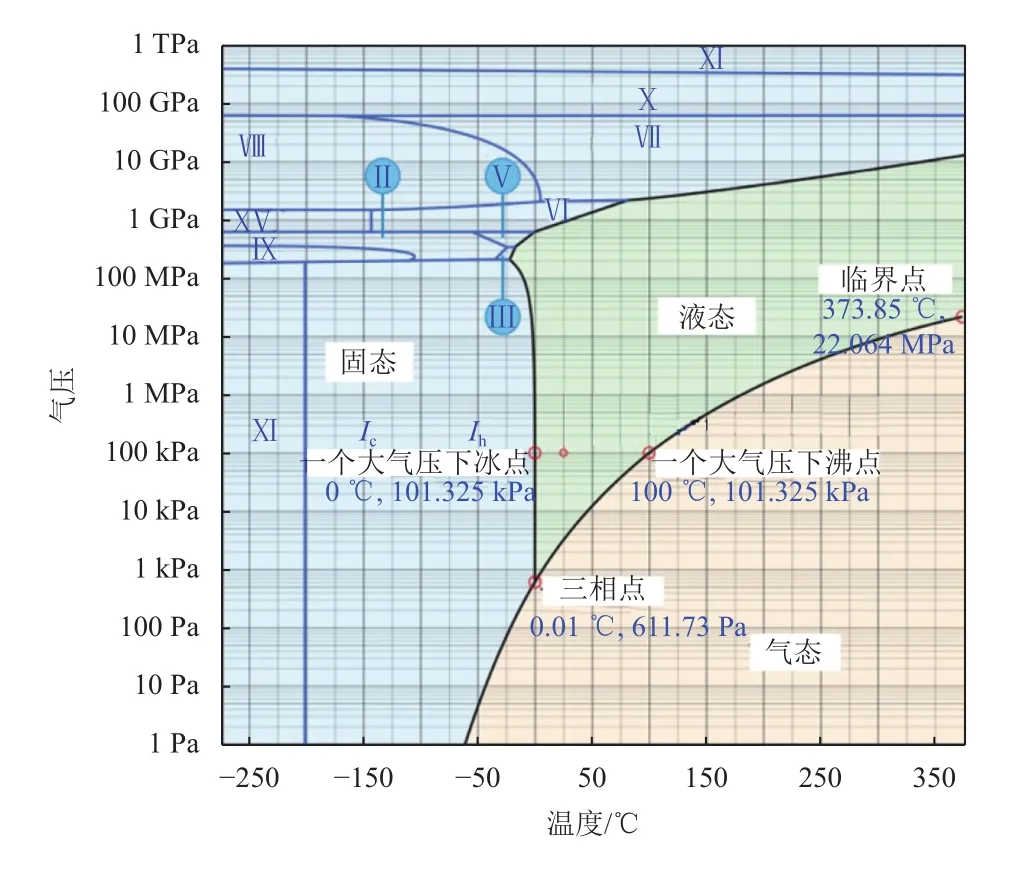
图2 水的三相图Fig. 2 Three phase diagram of water
要规避这一风险,除了机构要优化设计外,更要设计科学合理的钻进规程,既要满足不同对象钻进和样品采集的功能需要,又要控温升控相变。这项工作要基于对极区月壤的可钻性、取芯特性的研究,建立可钻性、取芯特性与钻取采样机构设计参数、动力参数之间的定性、定量关系,形成适用的钻进规程。目前的研究进展表明,采用低转速、慢进给的钻进策略应该是可行的方法。
3)极区月壤地面模拟物制备技术
地面模拟物制备对采样作业机具的研究与试验验证至关重要。地面模拟物制备的前提是对拟作业区域的对象特性具备基础性认识,特别是与采样作业相关的构造特性、强度特性、热物性等。对于月球中低纬度月壤特性,我国“探月三期”工程任务中进行了大量研究,也制备了相似度较高的地面模拟物。而对于月球极区,由于还没有接触式探测的先例,所有认知都是基于遥感观测分析推演得出,缺乏关于极地月壤剖面中水冰物质范围和分布的定量信息,特别是要制备出包络性、覆盖性、等效性高的极区月壤模拟物是具有挑战性的工作。尤其是水的存在,导致月壤的均一性存在极大变数,未来的探测所遇到的含水星壤的性质可能会有很大的不同,大幅增加了模拟月壤的制备难度。对此,一方面需加强极区遥感资料调研与分析力度;另一方面借鉴地面冻土水冰研究成果势在必行。
即使对于极区月壤特性有了一定的认知和判断,要制备低温含水模拟月壤也绝非易事。如何在地面实现类比极区的低温环境、如何在这种环境中大批量制备足以支撑取样试验的模拟月壤、如何评价模拟物的等效性、科学性和样本覆盖性,都是需要研究和解决的问题。
2 月球极区钻取采样相关技术现状
2.1 采样机构设计技术
欧洲航天局(European Space Agency,ESA)与俄罗斯联邦航天局(Russian Federal Space Agency,RKA)合作计划2020年发射“月神27号”(Luna 27)着陆器,拟着陆于南极艾特肯盆地(South Pole Aitken Basin),其主要任务是勘探永久阴影区的矿物、挥发物组分和水冰,以研究资源就位利用的可行性。ESA将提供全新设计的自动登陆系统以及一个勘探载荷包(包括钻探、取样、送样、处理、分析)。首先由意大利Finmeccanica公司设计的钻机钻取1~2 m深的水冰-月壤混合物,然后送至由英国开放大学(UK Open University)研制的化学分析腔进行成分分析。目前研究团队已经利用模拟月壤在133 K环境下进行了钻机取样测试[7]。
美国正在研制一种移动就位取水器(Mobile In-Situ Water Extractor,MISWE),如图3(a)所示,利用深槽螺旋钻提取表层剖面星壤,然后转移到处理舱中加热提取星壤中的水分[8]。
HoneyBee Robotics SMC公司为美国国家航空航天局(National Aeronautics and Space Administration,NASA)开发了建筑和资源利用探索(Construction and Resource Utilization eXplorer drill,CRUX)钻探测试平台,能够在不同表面和环境条件下对各种目标中的不同穿透方法、不同钻头几何形状和不同的控制算法进行研究,如图3(b)所示。开发的主要目的是勘探月表下物质组成,特别是针对月球南极预期的水冰,以实现原位资源利用(In Situ Resource Utilization,ISRU)。CRUX钻头设计为可以纯旋转,旋转敲击或冲击钻孔,能够在各种目标材料(如石英、岩石或冰)中进行高效钻孔,可达到的采样深度至少为2 m[9]。
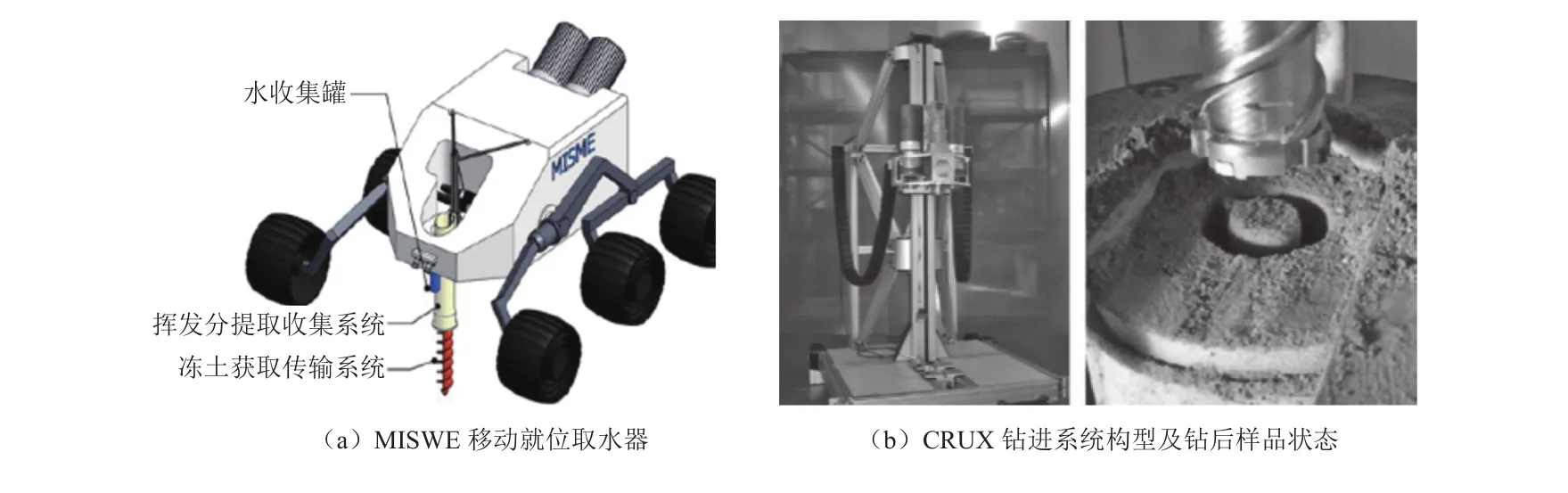
图3 MISWE移动就位取水器和CRUX钻进系统Fig. 3 MISWE and drilling system and sample condition of CRUX
2.2 冻土模拟物制备技术
目前国际上普遍采用的冻土模拟制备方式是将水与干燥的模拟月壤机械混合或蒸馏润湿混合。这两种方式简单、易操作,在配制饱和点以下模拟星壤水冰样本时具有一定的参考价值,但也有一定的不足,例如:在模拟星壤水冰样本达到过饱和时,机械混合或蒸馏润湿混合均无法保证样本含水量的均匀性;在这两种方式下,模拟星壤水冰样本的制备无法实现组构及局部层理的在线控制;两种制备方式的制作周期较长,样本制备的可重复性、等效性较差。模拟物制备方面典型的工作成果为:①NASA研制了各种版本的月球极地模拟物,如NULHT系列,被认为是月球极地月壤与一定量的水冰混合后的物质,可被用于模拟月球极地风化层的基础材料。该系列具有与JSC-1A月壤模拟物相同的颗粒尺寸分布,但其矿物组成却有不同[10];② Craig Pitcher等以“导流混合法”“蒸馏湿润法”“高压蒸馏法”等不同方法进行了样品含水率的配置[11-12],如图4所示;Kris Zacny等以JSC-1A月壤模拟物和FJS-1月壤模拟物为原料,采用混合冷冻法尝试制备了冻土类模拟月壤并实现在1 m高的土柱中分层布置不同含水率的模拟物[13-14];Marcus Piquette等将基于JSC-1A月壤模拟物的水冰样本冷却到100 K并保持在真空状态下,通过实验测试了模拟物的稳定性[15]。
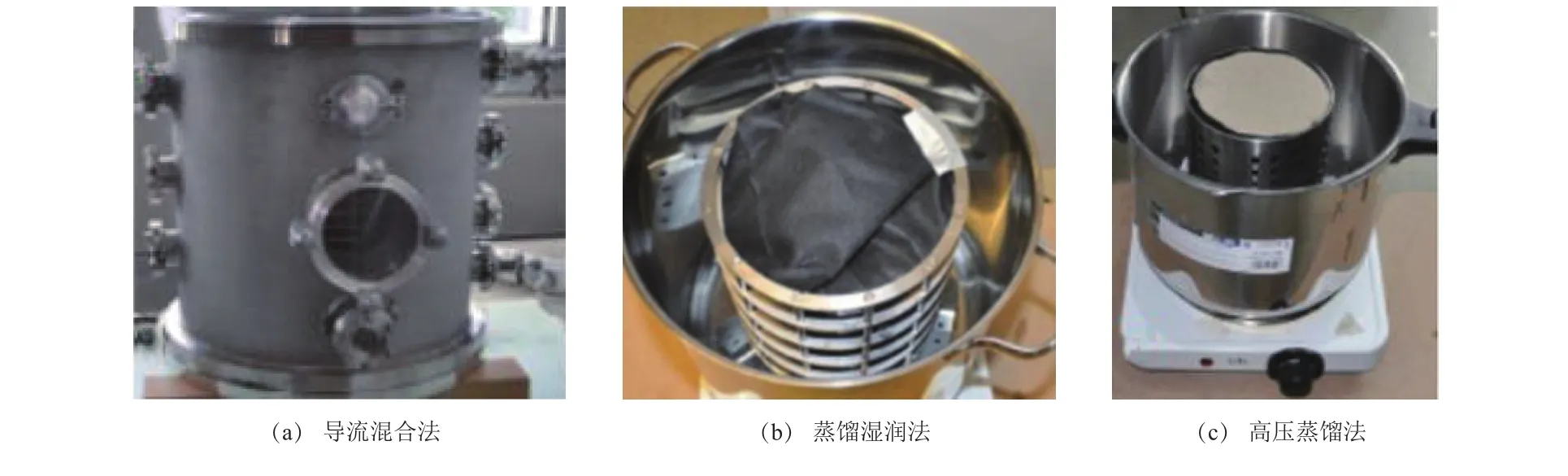
图4 冻土月壤模拟物制备方法Fig. 4 Preparation methods of simulated icy lunar soil
3 极区钻取采样技术方案设计
3.1 极区永久阴影区次表层原位取样技术
3.1.1 作业模式
根据我国“探月四期”任务规划,“嫦娥7号”将携带飞跃探测器对极区永久阴影区进行探测。飞跃探测器主要功能在于随着陆器在撞击坑坑缘的持续光照区着陆,携带有效载荷,从着陆点起飞,在撞击坑内的永久阴影区着陆。飞跃过程及着陆后对永久阴影区内的水冰等资源进行短时原位多点移动探测,然后复飞,并重新着陆于坑缘的持续光照区。
飞跃探测器需携带一套样品采集与转运装置,在永久阴影区着陆后,通过取样机构实现原位次表层月壤样品取样,并将次表层样品转移至分析仪器,开展永久阴影区内是否存在水冰、永久阴影区月壤成分等分析,具有重要的科学价值。
3.1.2 设计要素分析
搭载于飞跃器的原位采样机构应满足以下技术需求:
1)根据目前科学界研究推测,永久阴影区内表层下0.5 m即可能有水存在,因此,取样机构至少满足不小于0.5 m深的次表层样品取样能力;
2)由于永久阴影区内为深冷环境,低温可达-230 ℃左右,样品采集与转运装置必须具备耐极低温的能力,并且能够在极低温下正常工作;
3)所取次表层月壤样品应尽快转移至分析仪器开展分析,避免次表层样品特性由于长时间暴露而发生改变;
4)由于飞跃探测器自身重量有限,且月面为低重力环境,取样机构在开展次表层样品取样时,反作用力不宜过大,所需资源应最小化;
5)要配合飞跃器进行多点探测,采样机构应具备多点多次作业能力。
3.1.3 极区永久阴影区次表层原位取样方案设计
针对极区永久阴影区次表层原位取样任务需求,提出两种不同原理的方案设计:定点深度区间取样与转移方案和锥形螺旋取样与转移方案。
1)定点深度区间取样与转移方案
定点深度区间取样与转移方案包括进给驱动部件、回转驱动部件、取样驱动部件、滑轨、螺旋钻具、丝杠、定心机构、容器驱动部件、样品容器和热分离装置等,可实现月表指定深度开始、至指定深度为止的深度区间取样。样品容器可设计为单个容器,也可设计为圆盘形,并在圆周上设置多个样品容器。定点深度区间取样与转移方案原理如图5所示。
定点深度区间取样与转移方案取样阶段工作流程如图6所示:
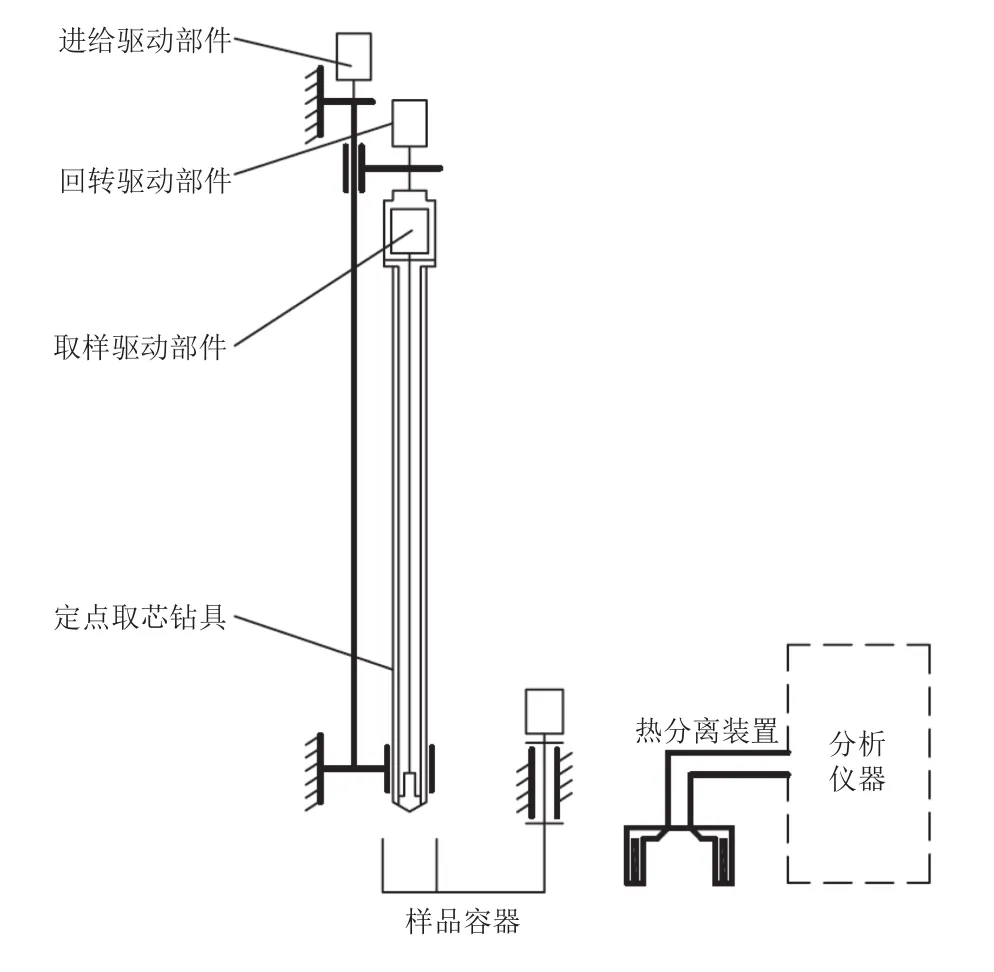
图5 定点深度区间取样与转移方案原理图Fig. 5 Schematic diagram of fixed depth interval sampling and transferring scheme

图6 定点深度区间取样与转移方案取样阶段工作流程Fig. 6 Sampling workflow of fixed depth interval sampling and transferring scheme
(1)螺旋钻具钻进至指定深度;
(2)取样驱动部件工作,带动定心机构上移,使钻具前端进样口打开;
(3)继续向下钻进,钻进过程中样品进入钻具芯部;
(4)完成指定深度区间样品取样后,将钻具提升至初始位置;
(5)容器驱动部件带动样品容器旋转,使样品容器移动至钻具正下方;
(6)定心机构下移,将样品推出钻具,落入样品容器中。
定点深度区间取样与转移方案样品分离阶段工作流程如图7所示:
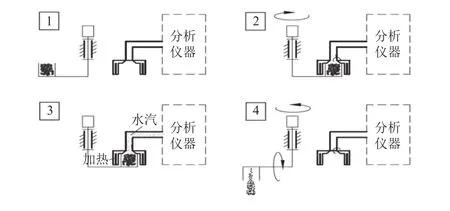
图7 定点深度区间取样与转移方案样品分离阶段工作流程Fig. 7 Sample separation workflow of fixed depth interval sampling and transferring scheme
(1)容器驱动部件带动样品容器旋转至热分离装置处,并完成样品容器与热分离装置的对接密封;
(2)热分离装置通道开关打开,对样品容器内样品进行加热,提取样品中的水成分;
(3)热分离装置通道开关关闭,容器驱动部件带动样品容器旋转并离开热分离装置处,并倾倒掉残余样品。
定点深度区间取样与转移方案优点:可对特定深度区间进行取样,所取次表层月壤样品完全不与表层月壤混合。
2)锥形螺旋取样与转移方案
锥形螺旋取样与转移方案包括进给驱动部件、回转驱动部件、滑轨、锥形螺旋钻具、钢刷及驱动部件、样品容器、样品转移机构和热分离装置等,可粗略实现月面次表层某一特定深度区间的样品取样,但不能完全避免不同深度的样品混合。锥形螺旋取样与转移方案原理如图8所示。
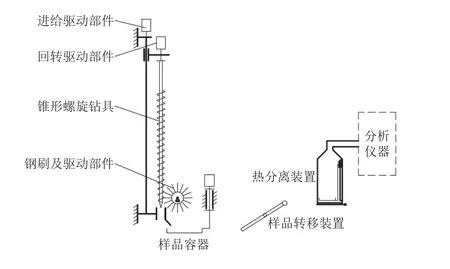
图8 锥形螺旋取样与转移方案原理图Fig. 8 Schematic diagram of conical spiral sampling and transferring scheme
锥形螺旋取样与转移方案取样阶段工作流程如图9所示:
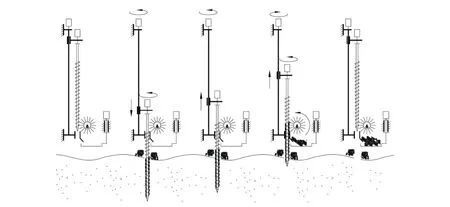
图9 锥形螺旋取样与转移方案取样阶段工作流程Fig. 9 Sampling workflow of conical spiral sampling and transferring scheme
(1)锥形螺旋钻具钻进至指定深度;
(2)锥形螺旋钻具停止回转,直接将锥形螺旋钻具向上提出钻孔,螺旋槽将次表层月壤样品带出;
(3)当指定深度的月壤样品到达钢刷位置时,停止提钻;
(4)启动钢刷,再启动锥形螺旋钻具回转,同时缓慢向上提钻,将指定深度区间的月壤样品刷下;
(5)刷下样品通过重力作用落入样品容器内。
锥形螺旋取样与转移方案分离阶段工作流程如图10所示:

图10 锥形螺旋取样与转移方案样品分离阶段工作流程Fig. 10 Sample separation workflow of conical spiral sampling and transferring scheme
(1)容器驱动部件带动样品容器旋转至样品转移装置工作区域;
(2)热分离装置密封盖打开,装置内样品托盘下移至下限位,样品转移装置将样品容器内的样品转移至样品托盘;
(3)样品托盘上移至上限位,热分离装置密封盖关闭,样品转移装置复位;
(4)热分离装置对样品进行加热,提取样品中的水成分;
(5)热分离装置密封盖打开,装置内样品托盘下移至下限位,倾倒掉样品容器和样品托盘中的残余样品;
(6)样品容器、热分离装置恢复至初始状态。
锥形螺旋取样与转移方案优点在于:取样量大、结构简单、可靠性高,适用于对取样深度的精确度要求不高的作业工况。
3.1.4 极区永久阴影区次表层原位取样技术研究
针对前述两种不同原理的取样方案,研制了原理样机并开展了针对冻土模拟物的取样试验。图11为定点深度区间取样与转移方案取样试验及所取模拟冻土样品。
通过原理样机对冻土模拟物的钻进与取样试验可知,钻具可实现钻进至某个特定深度后开始取样,并在钻进至指定深度后完成断芯,结束取样。试验证明,该方案在定点深度区间取样方面具有可行性。
图12为锥形螺旋取样与转移方案取样试验。通过原理样机对冻土模拟物的钻进与取样试验可知,钻具可钻进至冻土模拟物指定深度,提出钻具后,钻具螺旋槽能将次表层样品带出,实现取样。试验证明,该方案在次表层样品取样方面具有可行性。

图11 定点深度区间取样与转移方案取样试验及所取模拟冻土样品Fig. 11 Experimental result of fixed depth interval sampling and transferring scheme

图12 锥形螺旋取样与转移方案取样试验及所取模拟冻土样品Fig. 12 Experimental result of conical spiral sampling and transferring scheme
上述两种方案由于采用了钻具,在工程应用中,还需考虑采样装置与月面垂直度的问题。根据作业方案的可行性分析,采样装置可安装于飞跃器结构板或搭载于机械臂。如果是安装于飞跃器结构板,则飞跃器着陆姿态决定了采样装置的角度。通过“嫦娥5号”的研制,目前我国已掌握全向15°倾角范围内钻取技术;如采样装置搭载于机械臂作为执行终端,则可通过臂上传感器保证钻杆对月面的垂直度。此外,针对多次采样作业需求,采样装置需具备自清洁功能以避免多次采样间样品混合污染,目前拟采用气吹结合样品刷组合工作方式处理样品容器内的残余样品。
3.2 极区非永久阴影区取样返回技术需求分析
3.2.1 作业方式
根据我国月球探测规划,“探月四期”第2次任务将针对月球南极附近非永久阴影区含有水成分的复杂月壤,开展采样作业,最终目标是将以水冰冻土形式存在的含水月壤返回地球。其中采样装置将继承“嫦娥5号”技术状态,针对极区特殊环境特殊对象进行适应性功能改造。采样器将搭载于着陆器,具备2 m深度次表层采样能力。
3.2.2 设计要素分析
极区采样返回作业区域的月壤起始温度约为–230~ –70 ℃,这对采样机构的环境适应性提出了更高的要求。由于在极区高真空环境下,水以气固两相存在,且在–70 ~ –60 ℃左右相变。因此,在采样过程中,水冰冻土对象中的水成分极可能在机具作业生热和环境低温的作用下发生气态和固态之间的相变,有可能一方面会导致采样机具与月壤之间、采样机具不同的运动部件之间的冻结,导致采样过程不能正常进行,另外也可能会导致月壤样品的失真,使样品丧失部分原态信息,在极端情况下,月壤中的水分全部升华并逃逸,这将导致采样任务无法实现将含水月壤带回地球的目标。
因此,极区非永久阴影区的采样返回任务对采样技术提出了以下需求:
1)能够适应超低温高真空环境,钻进深度米级以上;
2)能够有效进行水冰冻土对象钻进;
3)能够在样品采集和返回过程中有效控制温升、控制水元素相变,从而保持样品的原态信息;即使发生局部相变,也可通过密封手段,避免水分发生相变后大规模逃逸。
3.2.3 极区非永久阴影区取样返回方案设想
“探月四期”第2次任务将在月球南极附近非永久阴影区开展月壤样品采集并返回地球,采样作业环境不同于“嫦娥5号”的月球中低纬度区域。
月球南极的超低温高真空环境会对包括采样装置在内的探测器各分系统的低温环境适应性提出更高的要求,需对整个产品进行适应性设计,使其能够正常启动和工作。
现有的“嫦娥5号”钻取采样装置具备钻进、取芯、提芯、整形、传送以及展开6大核心功能,相应的由钻进机构、加载机构、取芯钻具、整形机构、展开机构、支撑结构等部分组成,其中前4大功能均和内含无滑差软质取芯机构的钻具相关。
前期使用与“嫦娥5号”钻取采样装置上相同的取芯钻具,在地面大气环境下对–70 ℃不同含水率的冻土进行了大量摸索性的钻进试验。结果证明,在一定的钻进规程下,可以实现2 m深度冻土的顺利钻进,同时,在钻进生热的作用下,冻土中的水分会在固态和液态之间发生相变,在某些试验中,出现了粘钻现象。当冻土的含水量较高时,取芯软袋所包覆样品中的水分会产生液化并渗漏出来。
同投入大量资金和人力重新设计一套极区月壤采样装置并进行技术验证的全新研制模式相比,对“嫦娥5号”钻取采样装置进行极区适应性改进,在继承大量成熟技术的基础上,使其满足极区非永久阴影区采样返回任务的需求,可以大大缩短产品的研制周期,降低技术风险,是在现有约束条件下更加可行的技术途径。
钻取采样装置极区适应性改进的关键在于通过控制钻进过程中钻具的温度升高尽量避免水分的相变,此外,通过密封手段,使得采样装置对少量水分发生相变后产生的次生影响具有一定的包容性,以上改进主要涉及取芯钻具。下面介绍改进工作的方案设想,主要包括两方面。
1)钻具控温
“嫦娥5号”钻取采样装置在钻进过程中实时监测力载特性,并据此调整钻进策略,以避免发生钻进故障,针对“探月四期”第2次任务的需求,可以进一步在钻具本体上增加测温组件,钻进过程中实时监测钻具上的温度场。当钻具某点上的温度超过水的相变温度时,即时调整钻进策略,降低钻具的温度,尽量避免水的相变。
由于钻具上可供安装测温组件的空间非常狭小,且测温组件的安装难度较高,钻具上能够布置的测温元件数量有限,难以获得完整的、精确的钻具温度场,而钻具表面的温度和与钻具接触的月壤的温度也不完全一致,仅通过实时监测钻具温度场来判断水分是否相变存在一定的滞后性。
通过控制钻具的温度还难以完全避免水分的相变,因此还应考虑一旦发生相变,如何将样品中的挥发物有效封存以保持样品成分信息。基于目前的技术状态发展,引入防水取芯袋并优化封口密闭设计是可行的途径。
2)取芯软袋防水和密闭封口
通过对取芯软袋进行防水处理,使其能够在耐受低温环境、保持力学性能的同时,具有对水分的隔离功能,以替代现有的用纤维编织的取芯软袋。软袋的防水处理可显著减少泄露出取芯软袋的水分,并有效缓解冻结,能够减少钻进阻力,降低取芯软袋翻转难度、有效缓解取芯困难,并在装满月壤样品后更易于整形。
软袋的封口方式与软袋的形式强烈相关,与软袋防水处理相适应的封口方案必须一同考虑。针对“探月四期”第2次任务的需求,钻取采样装置的封口组件除了防止月壤样品撒出,还需要较好的密闭性,防止在返回途中相变为气体的水分逃逸。因此,宜采用多道、异构的密闭封口形式。相比于记忆合金封口方式,拉绳系扣封口方式对取芯软袋的密闭效果更佳,但实施难度也更高。
3.2.4 极区非永久阴影区取样返回技术
目前,北京卫星制造厂有限公司已全面展开了极区非永久阴影区取样返回技术的研究[16-18],前期使用“嫦娥5号”钻取采样装置取芯钻具在地面环境下对冻土进行了大量摸索性钻进试验,随后开展了钻取采样装置的极区适应性改进工作,主要包括钻具控温、取芯软袋防水和密闭封口两方面的研究,并且已通过布置测温组件的技术途径初步实现了钻进过程中钻具温度的实时测量。
1)钻取采样装置冻土钻进试验
为了识别“嫦娥5号”钻取采样装置钻具及取芯机构对冻土类月壤的适应性,并为“探月四期”第2次任务的采样技术研究提供支撑,使用与“嫦娥5号”任务相同的取芯钻具在地面环境下对不同含水量的冻土进行了钻进试验。试验系统由冻土类模拟月壤、低温及测试设备、钻具综合性能测试台、取芯钻具等组成,具体构成如图13所示。

图13 冻土钻进试验系统Fig. 13 Icy soil drilling test system
先后使用5%、10%和30% 3种不同含水率的冻土开展了钻进试验,过程中的排粉情况如图14所示。取芯软袋内的样品状态如图15所示。试验证明了在低转速、慢进尺、断续作业的钻进规程下,使用与“嫦娥5号”钻取采样装置相同的钻具可以实现2 m深度冻土类模拟月壤的顺利钻进。
2)钻进过程钻具温度监测技术

图14 不同含水量冻土钻进情况Fig. 14 Drilling of Icy soil with different water content
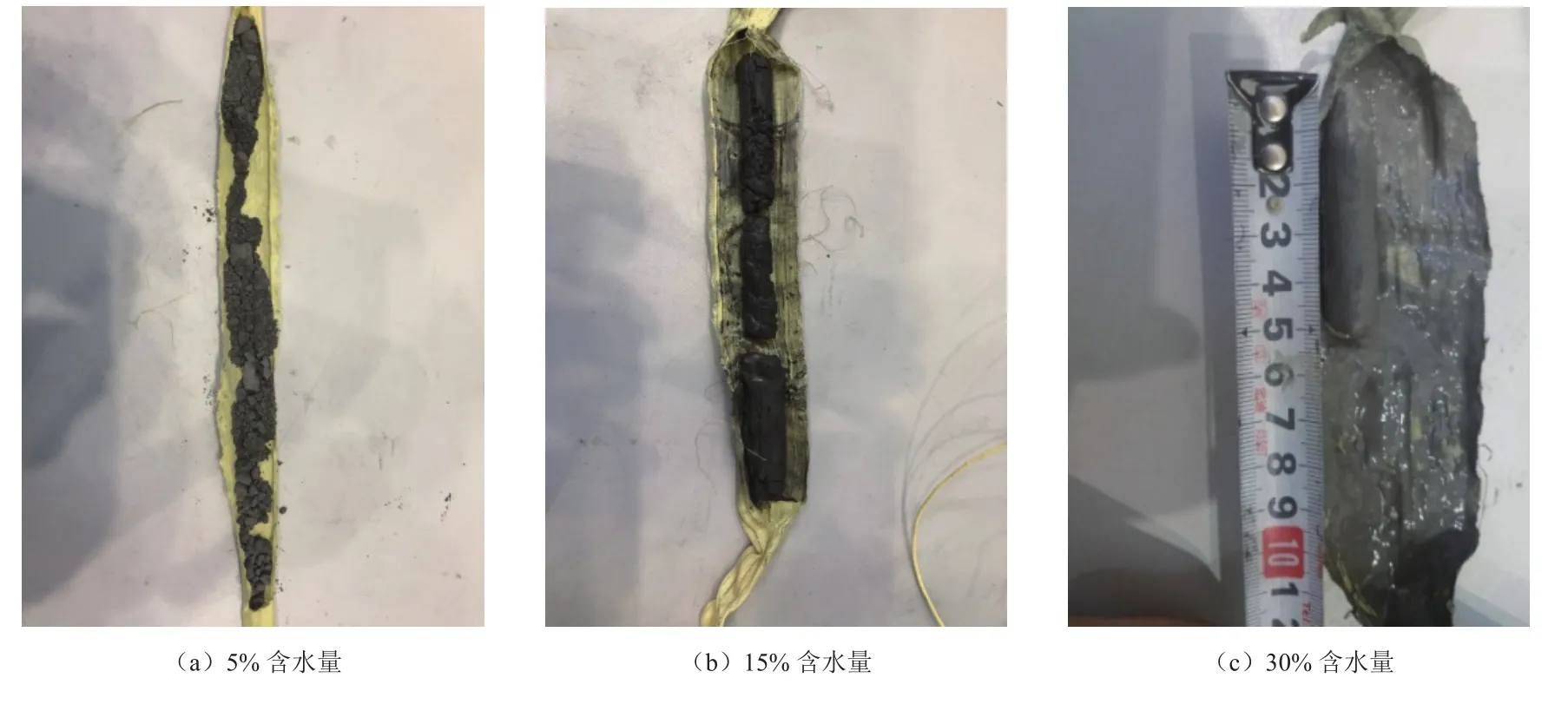
图15 不同含水量冻土样品Fig. 15 Icy soil samples with different water content
对钻具温度进行监测呈现下面几个特点:①空间狭窄,测温元件布置困难;②实时动态测量,测温组件随着钻具旋转,数据传输存在绕线问题;③测温组件需能够承受一定的振动与冲击,并耐受不同部件之间相对转动引起的可能的磨损。基于测温范围、测量精度、几何尺寸、响应速度等因素考量,热电偶温度传感器是较好选择。钻头上的热电偶布局如图16所示,共设置3个温度测点:1号测点测量的是钻头最前端切削刃处的温度;2号测点测量的是取芯机构护套与钻头接触点的温度;3号测点测量的是钻头与钻杆接触点的温度。

图16 钻头上的热电偶布局Fig. 16 Thermocouples on the drilling bit
在钻杆内部布置热电偶的方式为轴向方向上,每隔一定长度布置一个热电偶,共布置6个。由于热电偶丝比较细,在钻杆内部布置时,直接将其粘贴在内壁上。最终,包含钻头和钻杆在内的钻具上的热电偶的引出与转接如图17所示。
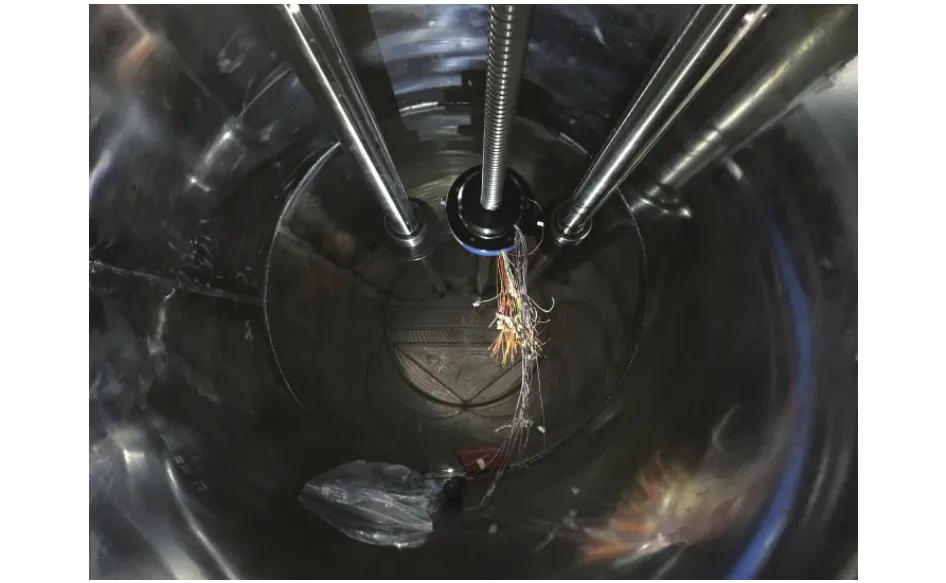
图17 钻具上热电偶的引出与转接Fig. 17 Lead out and transfer of thermocouples on the drilling tool
4 结 论
我国面向月球南极的“探月四期”工程任务对钻取采样技术提出了新的需求。极区真空低温环境、复杂对象给采样作业机具提出了全新挑战,需要突破适用于低温冻土类月壤的钻取、封装执行机构设计技术、低温对象钻进规程设计技术、极区月壤地面模拟物制备技术等关键技术推进采样技术研究。
针对极区永久阴影区次表层原位取样的任务需求,提出了定点深度区间取样与转移方案和锥形螺旋取样与转移方案两种方案设想,通过对两种方案取样过程的关键技术和关键环节开展原理验证,证明两种方案原理具有可行性。
后续将围绕工程论证进展情况,进一步明确总体任务需求,在细化方案设计基础上,开展机具与对象作用关系、钻进规程设计、模拟物制备等其他相关工作,全面推进采样技术深化研究和采样机具设计工作,并通过试验验证进行方案和产品迭代优化,为工程应用提供技术支撑。
针对我国“探月四期”第2次任务将在月球南极地区非永久阴影区开展的取样返回任务的技术需求,对现有的“嫦娥5号”钻取采样装置进行极区环境适应性改进,是在当前约束条件下更加可行的技术途径。改进的关键在于通过实时监测钻进过程中钻具上的温度场,并及时调整钻进策略,控制钻进过程中钻具的温度,以尽量避免水分的相变,并通过对软袋进行防水改进和使用密闭封口方式,包容少量水分发生相变后产生的次生影响。北京卫星制造厂有限公司已经掌握了钻进过程中钻具温度场的实时监测技术,后续将进一步深入开展钻具温度控制技术、取芯软袋防水和密闭封口技术,最终实现钻取采样装置用于满足“探月四期”第2次任务的极区环境适应性改进。
对于月球极区钻取采样作业来说,控制钻具温升尤为重要。要实现有效控温,不单单要在钻具构型设计、温度传感器布置等装置设计方面进行优化,更需要设计合理的钻进作业策略,从自主控制层面进行温升控制。钻进作业策略的确立应建立在采样对象热物性研究和采样机具与对象作用关系研究基础之上,运用仿真分析、地面等效试验等手段,明确力载、温度等特征量与钻具温升的映射关系和反演规律,将是一项未来需要持续优化迭代的研究工作,对月球极区钻取采样任务的成功实施具有重要意义。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:30
东坡赤壁诗词(2022年4期)2022-10-30 12:18:17
科学大众(2022年17期)2022-09-22 01:37:40
小哥白尼(趣味科学)(2022年6期)2022-08-17 08:38:42
环境技术(2021年2期)2021-07-03 14:54:00
青少年科技博览(中学版)(2021年11期)2021-03-07 06:16:44
火力与指挥控制(2019年11期)2020-01-08 03:33:10
文萃报·周二版(2019年3期)2019-09-10 07:22:44
大众科学(2019年1期)2019-04-09 01:37:32
中国惯性技术学报(2015年1期)2015-12-19 13:11:49