一种永磁同步电机失磁故障滑膜调速方法
2020-09-23 07:55目云奎陈玄
电子产品世界 2020年2期
关键词:永磁同步电机
目云奎 陈玄


摘要:针对如何改善永磁同步电机(PMSM)控制性能,采用一种基于永磁磁链在线观测的滑模调速方法。首先,采用基于滑模变结构控制的速度环控制模型,分析永磁磁链对电机带负载能力的影响。然后,在磁场同步旋转坐标系中构造永磁同步电机的新型磁链观测状态方程,通过龙伯格观测器隔开观测器中电机速度变化对观测器误差方程造成的影响,借助Lvapunov稳定性理论对观测器的稳定性加以证明,依据滑模变结构等值控制原理构造出永磁磁链算式。最后,通过仿真验证了该方法的可行性。
关键词:永磁同步电机;滑模调速;永磁磁链;龙伯格一滑膜观测器
0引言
交流永磁同步电机因优异的性能在现代交流传动领域得到广泛的应用。永磁同步电机(permanent-magnetsynchronous motor,PMSM)永磁材料受外部磁场环境以及温度变化的影响而导致失磁,降低电机控制性能,严重时电机可能直接报废。针对PMSM受失磁影响而导致控制精度降低的问题,国内外许多学者开展了大量研究工作,文献[1】在电机转速恒定时,利用RLS算法对四个电气参数进行辨识,文献[2】在神经网络在线辨识算法中结合最小均方值收敛辨识出电感磁链等参数,文献[3】把离线估算出的定子电阻用于神经网络辨识器,对转子磁链等参数进行在线辨识,然后利用在线辨识的参数进一步更新定子电阻值,由于存在离线辨识导致该方法难以满足实时性要求过高工况,文献[4】采用多智能体蝙蝠算法对永磁同步电机多个参数进行辨识。文献[5-6】为了过滤掉辨识过程中噪声信号,采用扩展的卡尔曼滤波器辨识电机参数,但计算过程较为复杂。文献[7]剖析欠秩问题的本质,通过自适应律得到永磁同步电机的速度和永磁磁链。
永磁同步电机运行时永磁磁链受到外部环境的影响而发生变化,从而导致永磁磁链发生失磁,进而影响到滑模调速控制性能。文献[8】基于指数趋近律进行滑模调速控制,改善了永磁同步电机控制性能。文献[9】利用积分滑模改善速度环控制,得到一定的效果。文献[10】采用的新型趋近律与分数阶控制相结合设计速度控制器以减小系统的抖动性。
针对传统速度调节方法没有考虑到永磁磁链变化对永磁同步电机带负载能力的影响。本文利用滑模变结构控制与龙伯格控制器相结合的方法对永磁磁链进行重构,重构参数反馈到速度环中进行调节,进而保证发生失磁工况时永磁同步电机的带负载能力。通过仿真对该方法的可行性进行验证。
1PMSM数学模型
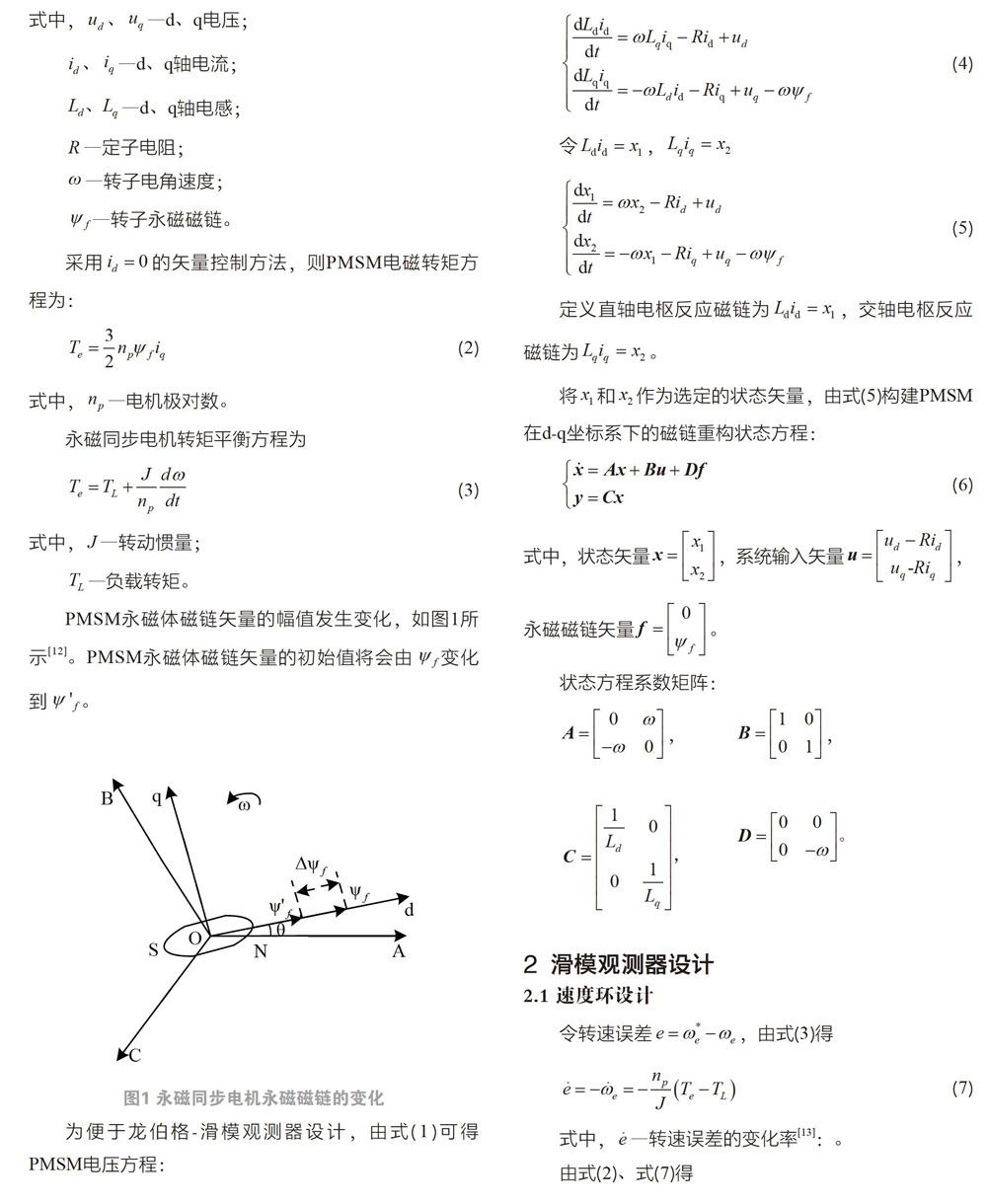
在同步旋转d-q坐标系下PMSM的电压方程为:
仿真在电机失磁工况下进行,磁链在0.1 s时,由0.175 Wb变为0.150 Wb。
为了验证所构造的磁链观测器的鲁棒性,分别在PI调速控制和滑模调速控制两种情况下运行,且在0.08 s时,电机速度由300 rad/s加速到380 rad/s。仿真结果如图2(a)、图2(b),结果显示在两种控制下,设计的观测器能很好地跟踪目标参数,鲁棒性较好。
图3是PI调速控制下iq轴电流、电磁转矩以及转速响应时间曲线。图4是滑模调速控制下iq轴电流、电磁转矩以及转速响应时间曲线。由图3(a)、3(b)和图4(a)、4(b)可以看出,分别在0.05 s和0.1 s时,负载转矩由0N.m突加为2 N.m、永磁体磁链发生失磁时,PI调速控制下,‘轴电流以及电磁转矩响应较慢。由图3(c)、4(c)可知滑模控制下,转速可以快速响应。由图(3)、图(4)知,当发生失磁工况时,应及时观测出磁链,并反馈到速度环,以保证电机带负载能力不变,仿真结果表明,磁链观测器具有较高的鲁棒性,以及在失磁工况下滑模调速控制具有明显优越性。
4结论
本文提出了永磁同步电机新型状态方程模型与滑模变结构以及龙伯格观测器相結合方式,隔开了电机速度对观测器误差方程的影响,给出磁链参数观测值,然后把观测所得观测值反馈到滑模调速控制中,以保证电机快速响应。鲁棒性强.滑模变结构观测器参数易于选择。仿真结果对该方法的可行性进行了验证。
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11