双履带机器人移动系统爬楼性能研究
2020-09-23 02:52:40施晓东
科学技术创新 2020年28期
施晓东
(中海石油(中国)有限公司天津分公司,天津300450)
1 概述
近年来,随着科技的进步,机器人技术得到了快速发展,巡检机器人作为服务类机器人的一种,在园区、银行、社区、商场、机场、仓库、危化企业等重要场景起到巡逻安防作用。巡检机器人按照移动方式主要分为腿式移动机器人、履带式移动机器人、轮式移动机器人以及复合结构移动机器人。其中,腿式移动机器人控制难度大,复杂环境下的适应能力弱,轮式移动机器人复杂路况适应能力差,复合结构移动机器人结构复杂、故障率高,而履带式移动系统控制简单、路况适应能力强,成为巡检机器人移动方式的主要选择。
本课题提出了一种尺寸娇小,能够实现爬楼功能的双履带机器人移动系统,并对其爬楼过程做了详细分析,通过样机测试进一步验证了双履带机器人的爬楼功能。
2 双履带机器人移动系统方案设计
设计的双履带机器人移动系统如图1 所示,移动系统主要由机械和动力两部分组成,机械部分主要由车体、履带、驱动传输装置、主驱动轮、负重轮、导向轮、避震器及张紧装置组成;动力部分主要由伺服电机、蜗轮蜗杆减速机、锂电池、驱动器和信号发送接收装置组成。移动系统左右两侧各设置一套伺服电机和减速机,通过驱动传输装置分别驱动对应侧履带旋转。

图1 双履带机器人移动系统结构图及渲染图

表1 双履带机器人移动系统参数表
3 双履机器人移动系统爬楼过程分析
双履带机器人可以实现平稳爬楼的条件为移动系统在爬楼过程的任意位置处都能保证履带与台阶至少有两点接触,基于此,将双履带机器人爬楼过程大致分为5 个阶段:履带前侧搭上第一节台阶、履带与楼梯台阶两点接触、履带与楼梯台阶三点接触、履带前侧离开台阶、履带后侧离开台阶完成爬楼。
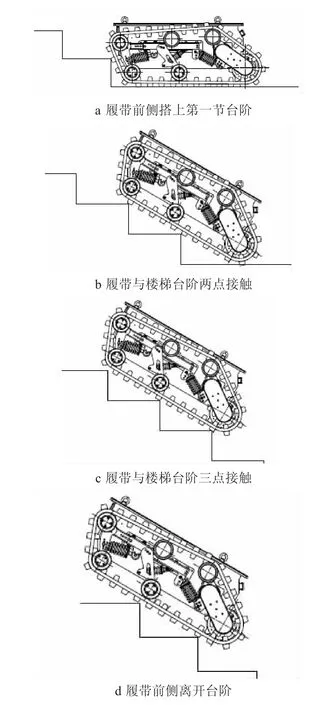

图2 双履带机器人爬楼过程分析
双履带机器人在爬楼过程中,不产生履带滑移的条件为:
其中,μ 为履带与楼梯台阶的摩擦系数,f 为履带与楼梯台阶的摩擦力,N 为履带与台阶接触点的正压力。
经理论分析,双履带机器人在爬楼过程中所需扭矩主要分为机器人越上第一节台阶和连续爬楼两种情况,对这两种运动状态进行受力分析,如图3 所示:

双履带机器人在图3(a)运动状态下的受力情况:

图3 双履带机器人爬楼过程受力分析

其中,f1、f2为楼梯台阶对履带摩擦力,α 为履带车与水平面夹角,β 为履带车前角大小,N1、N2为楼梯台阶对履带支撑力,L1,L2,L3,L4为履带车各支点作用力与驱动轮中心垂直距离,G 为履带车重力。
4 样机试验
为验证双履带机器人爬楼功能及其稳定性,对设计制作的机器人移动系统进行爬楼性能测试,测试楼梯台阶高150mm,宽260mm,整个爬楼过程如图4 所示:

图4 双履带机器人移动系统爬楼功能测试
测试表明,双履带机器人可爬上台阶高150mm,宽260mm的楼梯台阶,爬楼全程双履带机器人车体底部未触及台阶,整个过程运行平稳,没有明显颠簸。
5 结论
本文提出了一种双履带机器人移动系统,并对其爬楼过程进行了动作分解及受力分析,通过现场测试表明设计的双履带机器人移动系统能够实现平稳爬楼功能,双履带机器人移动系统通过搭载不同功能模块,可制作不同用途的移动机器人,具有广阔的市场前景。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
中国石油石化(2021年8期)2021-03-30 12:39:14
石油化工建设(2019年6期)2020-01-16 08:03:42
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
制造技术与机床(2017年3期)2017-06-23 08:11:21
橡胶工业(2015年4期)2015-02-23 23:29:38