一种非相似余度位置信号检测技术
2020-09-22 13:36刘文虎郑继敏文军
理论与创新 2020年14期
刘文虎 郑继敏 文军


【摘 要】针对新一代航空航天飞行器电动伺服系统在强容错性、高可靠性等方面的要求,基于现有双冗余技术基础上,提出了一种电动伺服系统非相似余度位置信号检测方法。简要介绍了电动伺服系统原理,详细阐述了双冗余传感器技术、硬件设计及软件设计,并完成验证试验。试验结果表明,该方法能有效提升电动伺服系统的容错能力和可靠性,具有一定的推广应用价值。
【关键词】电动伺服系统;非相似余度;容错
引言
近年来,随着机械、电子、材料及控制理论等学科的快速发展,电动伺服系统在动态响应、高功重、长航时等方面具有明显优势,在航空航天工业领域得到广泛应用。电动伺服系统主要是有控制器、执行机构和工作软件组成的一类反馈控制系统,是机电一体化集成先进产品,其作为航空航天飞行器控制系统的执行机构,需实时采集舵面偏转角作为反馈信号进行闭环控制,从而控制导弹的飞行姿态。采用传感器实现对电动伺服系统输出的位置、力矩的检测,将检测信号用于系统闭环控制,基于传感器的位置信号检测作为伺服系统设计技术的重要部分,其性能、可靠性直接影响航空航天飞行器的系统精度。
当前电动伺服系统在基于传感器的位置信号检测冗余设计上主要采用串联式双余度、并联式双余度及双机并行工作等方式,为相似余度系统,当出现传感器软件设计、硬件设计、通信干扰等共态故障、通信异常等故障时,仍无法避免控制系统出现严重故障[3]。为满足新一代航空航天飞行器电动伺服系统的强容错性、高可靠要求,本文提出了一种电动伺服系统非相似余度位置信号检测方法,表述的双冗余传感器高度融合磁敏式的数字式传感器和接触式导电塑料电位计设计技术,在检测信号输出方面采用双DSP冗余设计完成对两类传感器输出的数字和模拟信号采集,实现了位置信号检测的非相似余度设计,消除共态故障和设计错误对控制系统带来的影响,进一步提升电动伺服系统的容错性、可靠性。
1.电动伺服系统原理
电动伺服系统由硬件和软件部分组成,硬件部分包括控制器、执行机构和电缆,工作软件装载于控制器的数字信号处理器(DSP)电路。控制器电路接收飞行器控制装置发出的指令信号,位置传感器输出的位置反馈信号经信号处理电路,根据采集到的指令数据和反馈数据进行综合解算后形成控制信号,数字信号处理器输出控制信号到电机驱动电路,电机驱动电路综合控制信号、电机霍尔输出信号进行综合逻辑解算,驱动伺服电机按一定规律转动输出,伺服电机通过减速器减速后带动操纵机构偏转,产生控制力矩,进而改变飞行器的飞行姿态。电动伺服系统的工作原理见图1。
2.非相似余度传感器技术
为满足高可靠性要求,为避免传感器可能出现的软件、硬件设计等共态缺陷,位置传感器采用非相似余度设计技术,将磁敏式的数字传感器和接触式导电塑料电位计进行串行设计,在检测信号输出方面采用数字信号和模拟信号两种方式,非相似余度传感器的组成如图2所示,传感器的三维外形如图3所示。
接触式传感器采用精密导电塑料传感器,是一种具有精确电子、机械输出的高精密电位器,具有线性精度高、旋转寿命长、平滑性和分辨率优等特点,作为传统类型传感器在军用、民用工业领域得到广泛应用。精密导电塑料传感器主要由转轴、簧片、基体等组成,其工作原理为:当转轴旋转时带动簧片在导电轨上滑动,通过引线获得可变电压或电阻输出。
数字式传感器是利用霍尔效应设计的传感器,由于该类型传感器具有可靠性高、测角范围广等特点,近年来在航空航天飞行器上得到广泛采用。该传感器的主体部件为霍尔感应芯片和磁铁,再通过外围电路实现机械旋转信号到电信号的转换,并通过CAN总线接口输出。在芯片内部有两对传统平面霍尔元件(图4中蓝色区域),这两对霍尔元件相互正交;还有一个集磁片IMC(图4中黄色区域)。
B//将在BX//和BY//两个分量方向上分别测量,芯片通过IMC集磁片将这两个平行于芯片表面的分量变换为与之成正比的两个垂直方向上的分量(分别为BX⊥和BY⊥),再通过芯片中可以感应垂直方向磁场的传统平面霍尔元件,来测量产生的这两个垂直分量(BX⊥和BY⊥)。在芯片上方放置一颗径向磁化的磁铁,该磁铁产生平行于芯片表面的磁场B//。当磁铁在芯片表面转动时, 芯片传感器部分将产生两个正交的差分信号(如图5所示),通过一个差分的全模拟处理链进行处理,经过处理的模拟信号由ADC转换为数字信号输出给微处理器模块,该模块将两个原始的霍尔信号用式(1)计算出角度位置信号:
微处理器根据计算得到的角度数据,再经过处理,以CAN总线数据格式输出。
3.冗余检测技术
3.1双DSP冗余技术
双DSP冗余技术采用并联冗余方式,在系统控制上设置主DSP和从DSP两个数字信号处理器, 主DSP与从DSP分别接受数字信号和模拟信号,针对数字信号和模拟信号采用不同的接收处理程序,分别完成位置信号等效转换。在正常情况下,即为主DSP正常工作的情况下,系统采用主DSP接收数字传感器反馈的数字信号,用于系统控制。在系统控制电上电后主DSP和从DSP均需要自检和互检,当系统工作过程中主DSP出现故障时,迅速切换到从DSP进行系统控制。
針对数字式传感器信号的传输,通常采用SPI、I2C和CAN等数字通信接口,CAN总线具有实时性强、传输距离远、抗干扰能力强,成本低等优点,同时使用CAN总线开发的器件使用简单。本文数字传感器采用的CAN总线通信方式。针对模拟式传感器信号的传输,本文使用DSP外挂A/D转换电路,可以直接对-10V~+10V模拟量信号进行采集处理。
系统的硬件原理框图见图6。
本文采用的双DSP冗余技术为热备份结构,当主DSP正常工作时,从DSP处于备份状态,随时监控主DSP的工作情况,一旦主DSP出现故障,立即切换到从DSP,相比单机运行系统的可靠度RS,双DSP冗余系统的可靠度RD:
假设单机运行系统的可靠度RS=0.95,则双DSP系统的可靠度RD =0.9975,系统可靠性得到较大提高。
3.2冗余切换技术
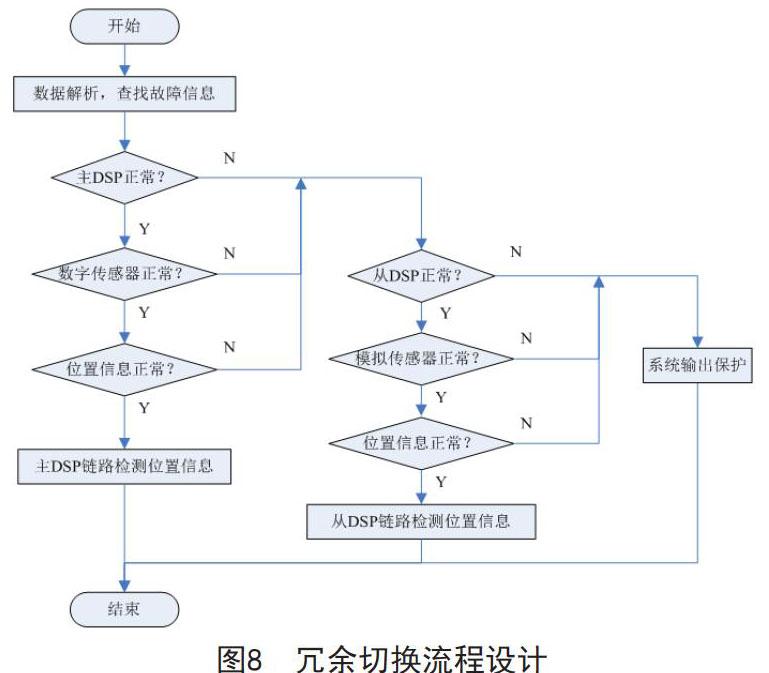
冗余检测技术的关键在于主从DSP的同步性、故障检测的实时性及冗余切换设计上,算法设计主要由数据接收采集、CPU同步、数据交互以及故障检测模块,系统运行见图7,硬件系统上电完成后,主从DSP各自完成上电初始化和系统自检,若自检正常则进行进行数据采集,完成数据采集后主从DSP进行CPU同步和数据交互,然后进行主从DSP互检,根据互检结果确定是否进行冗余切换,冗余切换流程见图8。
4.验证情况
系统正常工作的情况下,主从DSP和系统输出情况如见图9,主从DSP和系统输出基本一致,误差较小,自检和互检均无故障,系统以主DSP进行控制,无需冗余切换。
当系统数字传感器、数字通信链路或主DSP异常时,主DSP采集到的数据出现跳变,主从DSP和系统输出情况如见图10,系统切换到从DSP进行工作,保证系统正常工作。
5.结论
本文针对电动伺服系统在强容错性、高可靠性等方面的要求,提出了一种电动伺服系统非相似余度位置信号检测方法,能对DSP、位置传感器、信号传输电路进行检测和故障判断,该系统具有较好的容错能力,可保证系统连续可靠工作。
参考文献
[1]肖鹏斌.谈双余度电动舵机的余度策略及工程实现[J].工业科技, 2016(04).
[2]张晓红,丁喆,张安年. 双冗余无刷直流电动机位置伺服系统仿真与试验分析[J]. 中国电机工程学报, 2008, 28(18): 98-103.
[3]王敬.民用飞机余度作动系统可靠性研究[D].中国民航大学, 2012.