
基于TRIZ理论的抛挂装置优化设计*
2020-09-22 09:07王成军张玉平沈豫浙
机电工程 2020年9期
王成军,张玉平,沈豫浙
(1.深部煤矿采动响应与灾害防控国家重点实验室,安徽 淮南 232001;2.安徽理工大学 机械工程学院,安徽 淮南 232001)
0 引 言
高层建筑一旦发生火灾,会造成重大的人员伤亡及经济损失,这已引起全世界的普遍关注[1]。传统外部救援采用举高消防车和消防逃生气垫等方式。国内目前配备的举高消防车的最大救援高度多数在50 m左右,无法达到高层建筑救援的要求。而高度超百米的消防车数量有限,且受桥梁、隧道限高、转弯半径等影响,往往无法及时赶到救援现场[2]。
对于高层以及超高层建筑的逃生救援来说,逃生气垫的安全性不高。JIANG Hua等[3]设计了一种多功能悬挂式消防机器人,但该机器人体积较大,且救援时需要利用直升机将机器人本体释放到指定救援位置,而在实际情况中很难做到;LI Bin等[4]研究了一种破窗爬壁机器人,该机器人由攀爬机械臂和救援吊舱两部分组成,救援时机械臂破窗挂窗,带动救援吊舱向救援位置行进,该设备简单,但机器人的攀爬速度过慢。
若采用新型高层建筑外部救援系统[5-6],可使救援人员不受火灾现场高度限制,且设备操作方便,救援成本低、效率高、可靠性高。
利用TRIZ理论能够使设计者清晰地分析技术题,快速找到问题的本质或冲突[7-9]。针对高层建筑外部救援系统中的抛挂装置存在的不足之处,笔者基于TRIZ理论设计新型抛挂装置,并对挂钩进行静力学分析与优化。
1 问题分析
1.1 问题描述
高层建筑外部救援系统采用在高层建筑外部搭建临时救援通道的方式进行施救。救援系统示意图如图1所示。
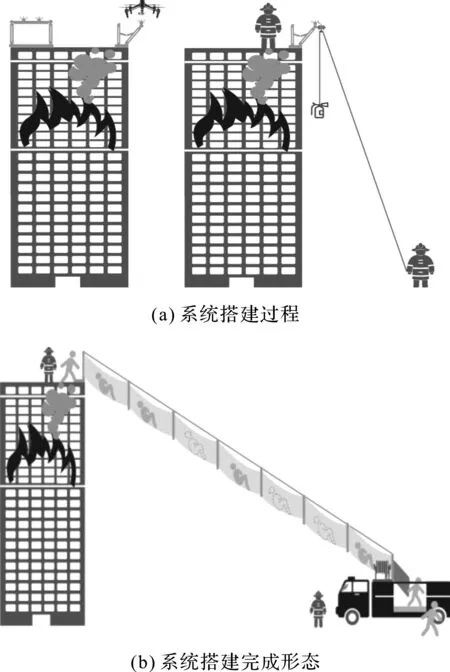
图1 高层建筑外部救援系统示意图
高层建筑外部救援系统具体救援方式如下:
(1)当建筑物内部发生火灾时,位于建筑物顶部的挂钩装置断电展开,地面消防员控制多功能专用救援车携带的无人机飞至楼顶,通过高清摄像头观察火场状况,利用无人机下方的夹爪将绳索收放器抛向挂钩装置;
(2)如图1(a)所示,当绳索收放器与挂钩装置连接后,卷筒以挂钩装置为起点下落至地面,在地面与挂钩装置之间形成一套快速运输系统,协助消防员运送必要的救援物资及逃生设备至建筑物顶部;
(3)如图1(b)所示,利用快速运输系统将钢丝绳与专用救援车上的可折叠式逃生通道相连接,将其上端牵引并固定在建筑物顶部的挂钩装置上,进而在建筑物和救援车之间形成一条缓降式安全救援通道供被困人员逃生。
在救援系统工作过程中,需要将无人机携带的绳索收放器与挂钩装置可靠连接。为了提高连接成功率和系统的安全性,笔者采用因果分析法对原始抛挂装置进行分析。
1.2 因果分析
因果分析法是一种通过构建因果链探明事件发生的原因和产生的结果之间关系的分析方法。
抛挂装置由挂钩装置和绳索收放器两部分组成,其因果轴分析结果如图2所示。

图2 抛挂系统因果分析图
由图2可知,抛挂装置主要存在的问题有:绳套数量不足、卷筒下落度过快、挂钩装置无法移动与转动、挂钩与绳套的连接刚度不足以及挂钩受力方向不稳定,等。
2 运用TRIZ理论工具解决问题
根据TRIZ理论解决问题需要先分析系统中存在的问题,利用因果轴分析找出问题产生的根本原因,再运用TRIZ工具得出解决方案[10-11]。
2.1 基于“矛盾解决原理”的挂钩装置创新设计
发明问题的核心是解决矛盾,对于技术矛盾可利用矛盾矩阵表找到相应的发明原理,找出解决矛盾的方法[12]。因为高层建筑外部救援系统在火灾救援中发挥极其重要的作用,要求其具有高适用性和高安全性。
原始抛挂装置结构如图3所示。

1—挂钩1;2—挂钩2;3—挂钩3;4—挂钩4;5—挂钩5;6—挂钩6;7—挂钩基座;8—挂钩底座;9—横梁

1—绳套;2—连接套筒;3—定滑轮;4—卷筒图3 抛挂装置结构图
在工作过程中,高层建筑外部救援系统挂钩装置需要承载逃生通道的重力以及被困人员逃生时产生的牵引力和摩擦力。图3(a)中,坐标指示的“外”为建筑物外侧,若无人机将绳套抛至挂钩装置外侧的4、5、6挂钩上,可在任一挂钩与地面的专用救援车之间形成一条缓降救援通道;若无人机将绳索收放器抛下时绳套悬挂在内侧的1、2、3挂钩上,在搭建救援通道时,牵引力会使挂钩装置产生倾覆力矩,存在较大的安全隐患,甚至会造成人员伤亡。此外,即使绳套准确地投放在外侧挂钩上,由于挂钩结构的不合理,也可能使已经连接成功的逃生通道因绳套与挂钩连接不稳定而脱落;
依据以上分析可知,图3(b)中的绳套能否准确抛至挂钩组件上,不仅与挂钩装置的结构有关,还与绳套的数量有关。
结合因果轴分析得出的根本原因,可将上述矛盾冲突的问题归纳为:力(内侧挂钩存在的牵引力)与适应性(挂钩的适用性)之间的冲突、运动物体的作用时间(绳套在挂钩上的作用时间)与可靠性(挂钩系统的安全性)之间的矛盾、可操作性(绳子与挂钩连接成功率)与可靠性(挂钩系统的稳定性)之间的矛盾。
通过查找阿奇舒勒矛盾矩阵表,可建立适合于本问题的子矩阵,如表1所示。

表1 抛挂装置的矛盾冲突矩阵
对表1中的发明原理进行分析筛选,有价值的原理有:11(预先防范原理)、15(动态化原理)、17(空间维数变化原理),笔者采用11(预先防范原理)和15(动态化原理)解决挂钩装置无法移动转动的矛盾。
故具体的方案如下:(1)设计新型挂钩底座,使其在横杆上可控移动,如将横移机构与初步设计的挂钩底座组合形成一个新的可移动式挂钩装置;(2)在挂钩底座与挂钩组件之间增加旋转机构,使挂钩组件能够自由旋转;(3)将最初单层排布的绳套改为多层交错排列。
改进后的绳套装置图4所示。

1—横移电机;2—齿轮;3—齿条;4—中心防滑钩;5—挂钩组件;6—新型防滑钩;7—挂钩底座

图4 优化后的挂钩装置结构图
2.2 基于“物-场模型”的绳索收放器创新设计
物-场分析法是指从物质和场的角度来分析和构造最小技术系统的理论与方法。
根据绳索收放器结构,绳索收放器中的卷筒以自由落体形式下落过程中会受到周围复杂环境的影响,其下落轨迹无法捕捉,且下落速度过快,地面的冲击力太大会对卷筒造成无法修复的损害。因此,根据TRIZ理论中有害效应的完整物-场模型,应用一般解法3,可通过引入一个机械场F2来解决下落速度过快的问题。
在卷筒内部设置小型双头电机,通过电机与限速杆的协同作用实现卷筒在下落过程中速度的可控。建立卷筒下落过程物-场模型,如图5所示。
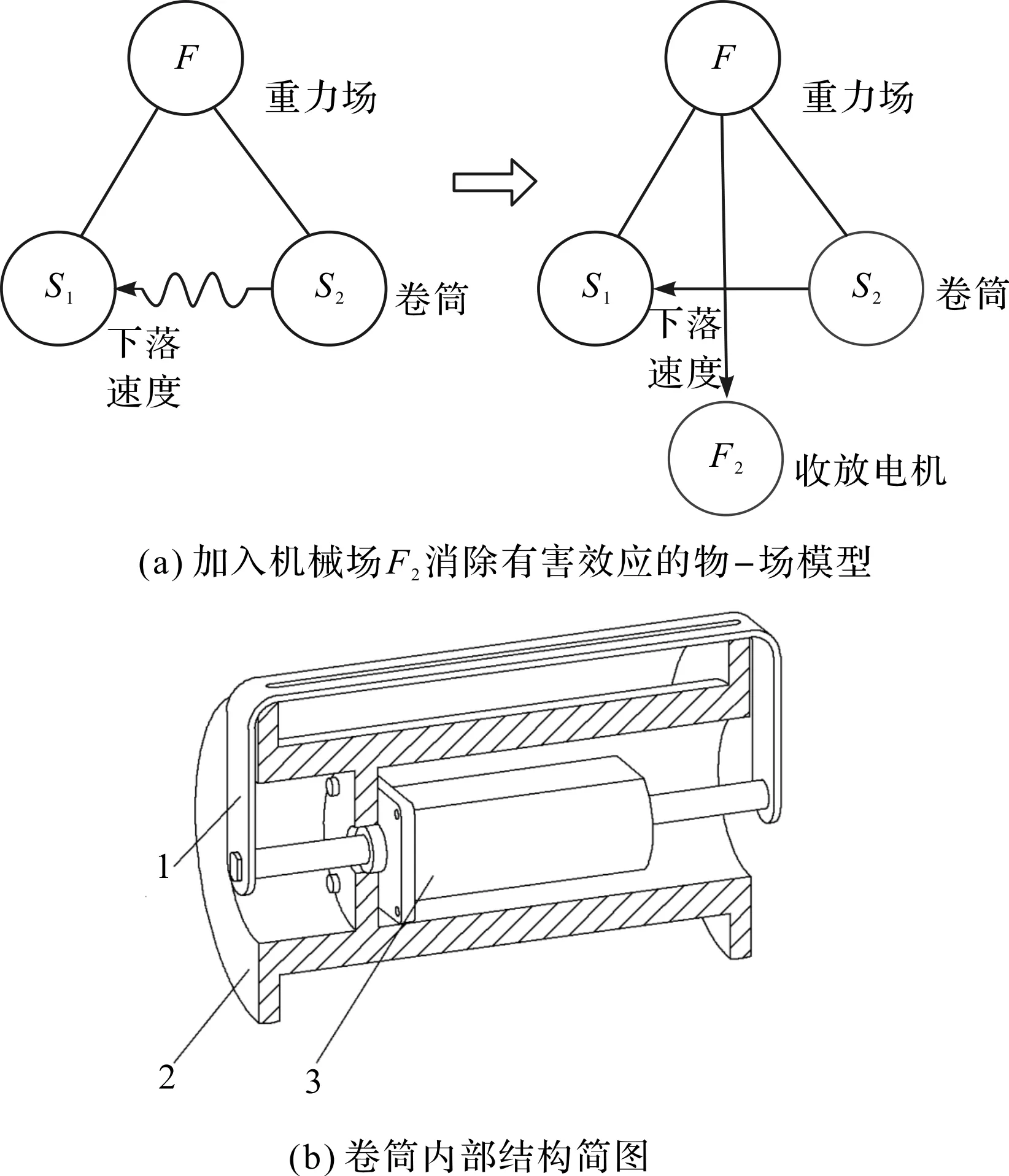
图5 绳索收放器优化设计图1—限速杆;2—卷筒;3—双头电机
3 理论计算与仿真
3.1 挂钩理论应力计算
救援系统工作过程中,挂钩装置需承载整条救援通道及人员的重量,须具有一定的强度。系统选用的挂钩为特制挂钩,采用GB/T 10051.1-2010标准[13]中规定的P级强度,其力学性能如表2所示。

表2 挂钩材料力学性能
挂钩简化模型及所求应力截面如图6所示。

图6 挂钩及受力截面图
根据标准所述,挂钩A-A截面应力为:
(1)
(2)
式中:δC—C点拉应力,MPa;Q—挂钩所受拉力,N;F—截面面积,mm2;KB—依截面形状定的曲梁系数;e1—截面重心至内缘距离,mm;e2—截面重心至外缘距离,mm;x—计算KB的自变量;dF—微分面积;R0—截面重心轴线至钩腔中心线距离,mm。
救援系统工作时,在建筑物顶端与地面救援车之间搭建临时安全逃生通道,考虑到建筑物高度、救援车与建筑物之间的距离,将通道的方向以垂直方向向外偏移30°,作为挂钩所受拉力Q的方向,设安全工作载荷为15 000 N。
根据挂钩三维模型计算出公式(1~2)中所需的其他各参数,代入后求得挂钩的曲梁系数KB=0.027,可得A-A截面处的拉应力δC=131.28 MPa。
3.2 挂钩静力学分析与优化
将基于Pro/E建立的挂钩模型导入Workbench中,添加静力学分析模块Static Structural[14-17]。挂钩材料选用优质碳素结构钢(DG20Mn),采用全局网格控制进行网格划分,网格单元尺寸设置为2 mm;对挂钩的根部施加固定约束并在凹槽内施加载荷,最后在结果中添加总变形和等效应力。
求解后得出的结果如图7所示。

图7 挂钩仿真分析结果图
由图7可知:
(1)挂钩A-A截面处的拉应力与挂钩的最大变形量分别为115.33 MPa和0.795 96 mm,与公式(1)拉应力计算结果大致相等;
(2)挂钩的最大等效应力为148.29 MPa,位于其颈部,考虑其工作过程中颈部应力较大,故须对挂钩的结构作进一步优化。
对挂钩颈部结构重新设计,将原颈部下侧有槽的部位改为平滑过渡结构,如图8所示。
将优化后的挂钩再次导入Workbench中,仿真得到等效应力与变形结果如图9所示。

图8 颈部优化后挂钩

图9 优化后挂钩仿真分析结果图
由图9可知:挂钩A-A截面处的最大应力为105.46 MPa,最大变形量为0.710 21 mm,优化后颈部的最大等效应力为135.59 MPa,相对优化前有所减小,增强了挂钩承载的能力,同时也提高了系统的整体安全性。
4 结束语
(1)运用TRIZ理论中的因果分析法、冲突矩阵及物-场模型,笔者设计了适用于高层建筑外部救援系统的新型抛挂装置;与优化之前的抛挂装置相比,实现了挂钩装置在横梁上的移动与转动,提高了卷筒下落过程的稳定性及绳套与挂钩的连接刚度;
(2)运用ANSYS/Workbench软件对挂钩进行了静力学分析,并根据分析结果对挂钩薄弱环节进行优化与仿真实验。
仿真实验结果表明:挂钩的最大应力由148.29 MPa降至135.59 MPa,最大变形由0.795 96 mm降至0.710 21 mm,优化后挂钩承载能力增强,提高了抛挂装置的安全性。
猜你喜欢
大众文艺(2022年22期)2022-12-01
大众文艺(2022年22期)2022-12-01
中国修船(2022年2期)2022-04-28
散文诗世界(2022年1期)2022-01-13
设计(2021年24期)2021-08-27
工业设计(2020年8期)2020-10-26
重型机械(2020年2期)2020-07-24
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
新疆钢铁(2016年1期)2016-08-03
