雷达和GPS水汽资料在人工增雨指标中的应用
2020-09-15 16:27孙莉娟徐阳鲁德金朱明佳
现代农业科技 2020年16期
关键词:雷达
孙莉娟 徐阳 鲁德金 朱明佳

摘要 利用雷达、GPS大气可降水量等综合分析了云物理特征参数在一次对流降水中实施人工增雨的指标,根据对流过程的演变,将其细分为生成、发展、成熟、减弱、消亡5个阶段来分析各物理参数的变化特征。结果表明,GPS大气可降水量对降水的产生有较好的指示作用;组合反射率、回波顶高、垂直积分液体水含量与降水相关性好,能表示对流云总体发展情况;成熟阶段是实施人工增雨的最佳时段。
关键词 人工增雨;雷达;GPS大气可降水量
中图分类号 P481 文献标识码 A
文章编号 1007-5739(2020)16-0160-03
安徽省为农业大省,夏季对降水的需求旺盛,开展人工增雨是开发大气水资源、改善当地水资源状况的一项重要措施。
近年来,各省在人工增雨外场作业中不断探索,试图构建适合各省的作业条件和作业时机的判断指标。雷达可探测对流云回波变化的高时空分辨率特性,对外场人工增雨作业有指导性[1-2]。20世紀90年代河南、河北两省就开始探索层状云的人工催化条件[3-4];王吉宏等[5]用沈阳棋盘山新一代天气雷达探测分析了2004—2006年在辽宁中西部地区进行的人工增雨作业及降水的雷达回波特征,初步总结出对积层混合云实施人工增雨作业的雷达判别指标。唐 林等[6]以湖南主要人工增雨积云和积层混合云为研究对象,得出湖南的人工增雨指标和评分规则,并建立地面人工增雨多普勒天气雷达指挥系统。伍志方等[7]利用广东省新一代天气雷达产品分析了春季广东中北部有利于降水的天气条件,并举例说明新一代天气雷达各种产品在人工增雨作业中的综合应用。郭 艳等[8]总结了江西2007—2008年人工增雨作业条件的多普勒天气雷达参数指标,并在此基础上建立了人工增雨作业条件判别方程。安徽省在人工影响天气作业条件分析判断方面也进行了初步探索,蒋年冲等[9]探讨了安徽省夏季不同类型降水系统中对流性降水云的结构、降水形成机制,旨在为进一步研究安徽省人工影响天气提供技术途径。
有研究指出,GPS信号的分析可直接得到大气水汽含量的变化,对判断增雨作业时机有很好的指导性。袁 野等[10]、王明明等[11]研究发现,地面降水与云液态水含量随时间的分布对应较好,在地面降水出现前,云液态水含量有跃增现象,利用这种现象可判断此时段云系正处于发展阶段,由此可应用于人工增雨作业条件的判别。
基于目前研究的现状,本文综合雷达、GPS大气可降水量和地面降水观测资料,针对2018年的一次对流降水过程,分析雷达参数、GPS大气可降水量与降水的关系,尝试建立识别增雨作业时机的参数指标。
1 资料选取
选用的资料有合肥市地面观测站降水资料、安庆探空站资料、合肥站地基GPS大气可降水量(PWV)。选用2018年8月7日安徽省内安庆、蚌埠、阜阳、合肥、黄山共5市的S波段雷达资料,SWAN系统能集合多部雷达数据,反演生成多种基本产品,包括三维拼图雷达产品、组合反射率、回波顶高、垂直积分液态水含量等。天气形势分析资料取自MICAPS系统生成的相关产品。
2 天气形势
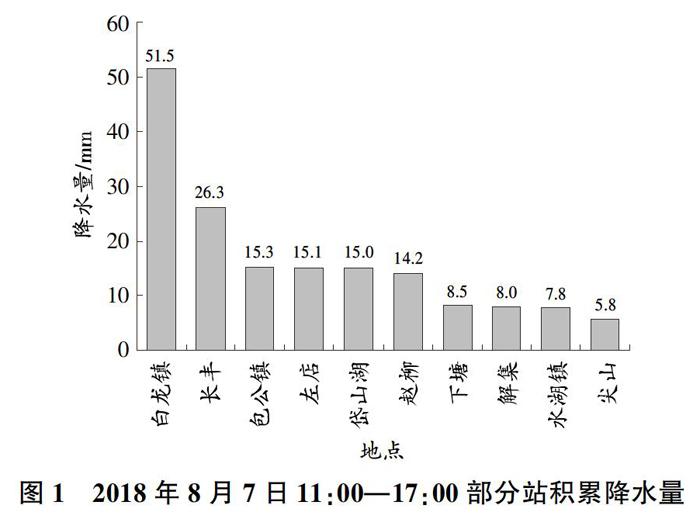
2018年8月7日合肥市及周边地区出现一次短时对流降水过程,降水从8月7日11:58开始,于17:00左右结束,强降水中心主要集中在合肥市东北部长丰县和肥东县一带,6 h累计雨量有10个站超过5 mm,最大降水量达到51.5 mm,出现在白龙镇(图1)。此次降水过程具有历时短、降水强度大、局地性强等特征。7日8:00 500 hPa(图2)上安徽省处于副高控制下,周围多短波槽,安徽区域水汽含量丰富。安庆探空显示大气层结不稳定,CAPE为2 564 J/kg,底层风切变强,700 hPa低层为西南风,高层为东南风。
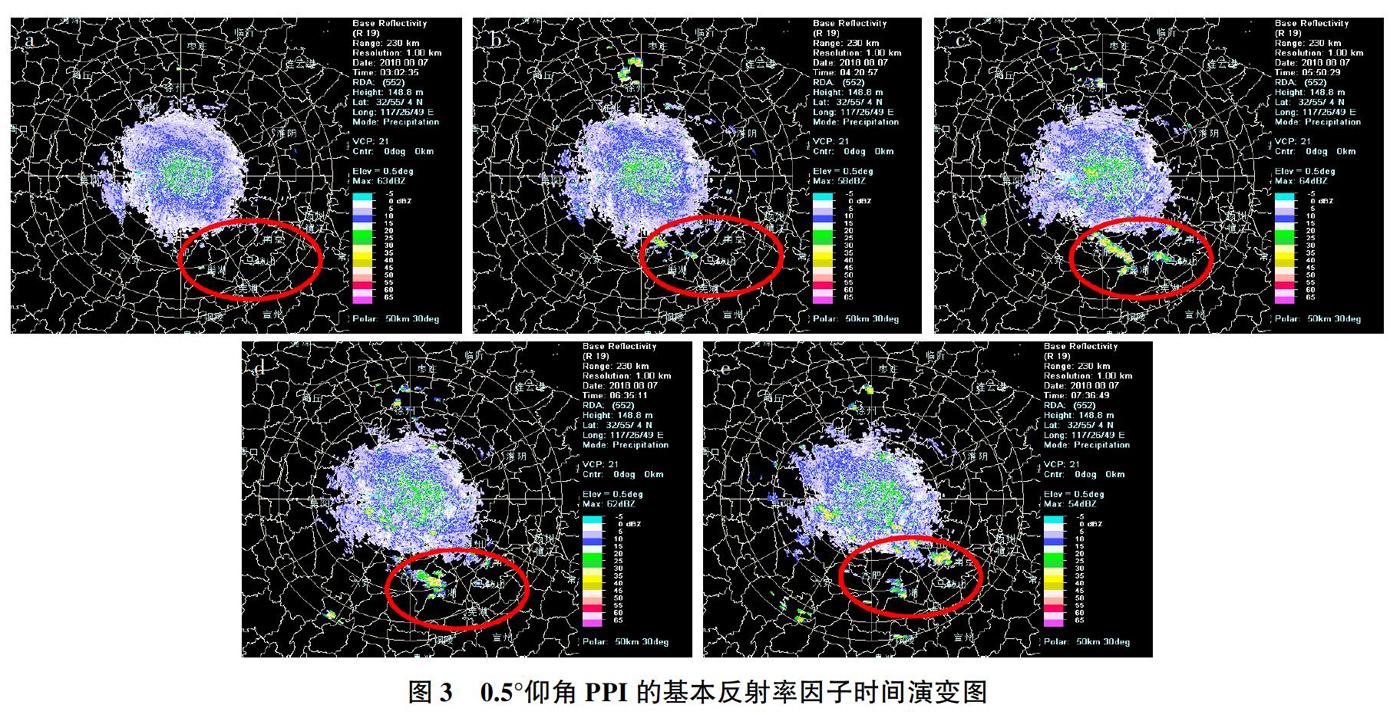
对流云11:00生成于合肥东部(图3a),对流回波迅速发展壮大(图3b),并在移动过程中逐渐形成东南—西北走向的对流回波(图3c)。在移动过程中逐渐增强,在14:50对流强度达到最强,基本反射率最大达到55 dBZ。在移动过程中有对流单体的生成和合并发展,14:00左右在巢湖市有新的对流单体产生,与原减弱的对流云合并后(图3d),持续发展一段时间,15:53在巢湖市消亡(图3e)。
3 基于PGS/PWV的判别指标
GPS大气可降水量(PWV)与天气系统的演变存在密切关系,其引发的降水等天气过程一般都对应着水汽总量的显著变化。由图4可以看出,降水发生前,大气可降水量PWV呈递增的趋势,大气中水汽含量不断增加,有利于水汽的积累,为降水提供有利的水汽条件。8月7日7:00 PWV值达到52.5 mm。合肥12:00左右开始出现降水,降水期间PWV保持减少趋势,但减少幅度比较小,PWV值在50 mm左右,降水在17:00左右结束,18:00 PWV值急速下降到46 mm。降水往往随即出现在大气可降水量的急速增加之后,降水发生后,水汽含量呈缓慢下降趋势,降水过程结束后,水汽含量迅速下降。PWV的减小预示降水过程的结束,降水过程与PWV峰值区对应较好,PWV的跃增对开展人工增雨时机有一定指示作用。
4 基于雷达资料的判别指标
雷达可探测对流云回波变化的高时空分辨率特性,分析2018年8月7日雷达产品与降水的关系。雷达参数包括回波顶高、18.5 dBZ云体积、30 dBZ云体积、冷层厚度、平均反射率、最大反射率、最大反射率高度和垂直积分液态水含量。各参数定义如下。①回波顶高:每个库上回波强度大于18.5 dBZ的最大高度。②面积:SWAN拼图数据格点大小为0.01经度×0.01纬度,其面积随纬度的变化有所变化,33°N的格点面积大小约为1.03 km2,所以计算段的面积时,将每个格点的面积近似为1 km2,所以段的长度即为面积。③冷层厚度:由风暴的二维分量计算风暴覆盖下的最大回波顶高,与零度层的高度差即为冷层厚度。④最大反射率:每个库上对所有垂直高度层的反射率进行比较,选择最大的反射率值,即组合反射率。⑤垂直积分液态含水量:降水云体在某一确定底面积垂直柱体内降水粒子总量折合成水的分布。
此外,雨量站为合自动雨量站分钟降水,SWAN三维拼图雷达资料时间间隔为6 min,为了与拼图资料时间一致,需要将分钟雨量资料统计为拼图资料体扫开始时间至结束时间对应的6 min累计降水量。
回波顶高、18.5 dBZ云体积、30 dBZ云体积、冷层厚度、平均反射率、组合反射率、最大反射率高度、垂直积分液态水含量等物量参量与雨强的相关系数分别为0.292 328、0.287 931 448、0.058 575 923、0.433 526、0.278 777、0.433 171 12、0.331 507 765、0.352 42。
可以看出,回波顶高、冷层厚度、组合反射率、垂直积分液态水含量与降水的相关性较好。回波顶高能代表云中过冷水含量;组合反射率表示对流云发展强度的状态,垂直积分液体水含量是判别强降水及其降水潜力的有效参量,故选择回波顶高、组合反射率、垂直积分液态水含量来表示对流云总体发展情况。
为分析出适合作业的最佳时段,基于目前的研究和本次对流过程的发展演变,将整个对流过程细分为生成、发展、成熟、减弱和消散5个阶段,不同阶段组合反射率、回波顶高、垂直积分液态水含量的回波参数特征如表1所示。
发展阶段,组合反射率、回波顶高、垂直积分液态水含量值比较低,组合反射率低于30 dBZ,回波顶高小于4 km,垂直积分液态水含量小于1 kg/m2。当对流快速发展进入发展阶段时,回波强度迅速增大到30 dBZ以上,回波顶高能达到6 km,液态含水量也变得丰富。回波增加速度很快,进入成熟阶段后,组合反射率最大能达到55 dBZ,回波顶高最高能发展到14 km,液态水含量也非常丰富,能达到20 kg/m2。持续40 min后,对流云开始减弱,组合反射率变弱,回波高度降低,液态水含量显著减少,直至整个对流消散结束。
对流降水过程局地性比较强,持续时间短,一般对流云降水从生长—发展—成熟—减弱—消散整个过程生命期在 30~240 min范围内。对流云系主要有多单体合并对流云与单体对流云,多单体对流云在生命史、回波高度、强度、尺度等方便都超过单体对流云,同时液态水含量和自然降水效率都比单体对流云大。本次对流过程为多单体合并对流云降水过程,综合各参数在对流过程中的演变指标,选择成熟阶段进行人工增雨作业效果较好。
5 结论与讨论
通过分析GPS大气可降水量、雷达参数与降水的关系,初步建立了识别增雨作业时机的参数指标。结果表明,降水开始前PWV的跃增对开展人工增雨有一定指示作用。雷达参数回波顶高、组合反射率、垂直积分液态水含量与降水的相关性好,可表示对流云总体发展情况。根据本次对流过程的发展演变,将整个对流过程细分为生成、发展、成熟、减弱和消散5个阶段,成熟阶段是适合开展人工增雨作业时段。安徽省对流过程中实施人工增雨的雷达指标:组合反射率发展到40 dBZ以上,回波顶高达到6 km,垂直积分液态水含量达到20 kg/m2。
本研究尝试将GPS大气可降水量和雷达参数应用于安徽省人工增雨条件和时段的判别研究中,对指导外场人工增雨业务更加准确直接,可有效提高人工增雨的效率,对安徽省人工增雨有重要的意义,但本研究结果仅为一次天气过程的分析结果,后续将积累大量安徽省对流过程的统计分析,以期给出具有统计意义的判据指标。
6 参考文献
[1] 王丽莉,陈真,王丽俊,等.CINRA-CB产品与自动站资料在人工增雨中的应用[J].气象科技,2003,25(4):572-576.
[2] 赵姝慧,秦鑫,李帅彬,等.新一代天气雷达常用产品在我国人工影响天气工作中的应用[J].地球科学进展,2012,27(6):694-702.
[3] 陈彬彬,李丹,林文,等.2017年10月14—15日厦门市人工增雨作业效果评估[C]//中国气象学会.第35届中国气象学会年会 S16 人工影响天气理论與应用技术研讨.合肥:中国气象学会,2018.
[4] 张存,周毓荃.人工影响天气优化技术研究[M].北京:气象出版社,2000.
[5] 王吉宏,张维全,班显秀,等.积层混合云人工增雨作业条件分析[J].安徽农业科学,2009,37(10):4560-4562.
[6] 唐林,魏鸣,王治平.湖南人工增雨云型的分析判别与多普勒天气雷达指挥系统的研制应用[J].气象科学,2007,27(1):95-100.
[7] 伍志方,叶爱芬,何如意,等.广东春季降水特征和人工增雨作业条件分析中多普勒雷达产品应用[J].气象科技,2009,37(2):224-231.
[8] 郭艳,蔡哲,杨建超,等.江西人工增雨作业条件的雷达回波参数指标分析[J].气象与减灾研究,2010,33(4):67-71.
[9] 蒋年冲,刘娟,胡雯,等.安徽夏季中γ尺度对流云的雷达回波特征[J].气象,2007,33(10):9-14.
[10] 袁野,王成章,蒋年冲,等.不同云天条件下水汽含量特征及其变化分析[J].气象科学,2005,25(4):394-398.
[11] 王明明.地基GPS水汽反演的误差分析与资料应用[D].南京:南京信息工程大学,2013.
基金项目 安徽省气象局新技术集成项目(AHXJ201706)。
作者简介 孙莉娟(1988-),女,江苏泰州人,工程师,从事人工影响天气综合业务、农业气象的研究工作。
收稿日期 2020-07-03
猜你喜欢
科普童话·百科探秘(2020年5期)2020-09-14
阅读(科学探秘)(2019年10期)2019-12-09
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车与驾驶维修(维修版)(2018年6期)2018-10-21
现代兵器(2017年3期)2017-03-15
小学生导刊(高年级)(2016年11期)2016-11-14
现代兵器(2016年4期)2016-04-27
少年科学(2015年7期)2015-08-13
小学科学(2015年4期)2015-05-21