基于Simulink仿真的健美操B142 动作模型研究
2020-09-14 10:27王秀平
实验室研究与探索 2020年8期
王秀平, 曲 峰
(1.忻州师范学院体育系,山西忻州034000;2.北京体育大学运动人体科学学院,北京100084)
0 引 言
近年来,Matlab / Simulink 仿真越来越广泛地运用于各种体育项目中,在辅助教学方面起到关键的作用。风靡于我国各大健身机构和校园的健美操运动项目,却没有运用仿真技术来模拟运动动作,量化其动作参数,运用于教学与训练。对健美操的动作进行仿真、量化、分析就显得非常有必要。
刘彦君[1]运用Anybody对燕式平衡的下肢动作进行仿真。刘刚等[2]运用Anybody对卧推力量训练进行仿真。李旭鸿等[3]运用LifeMoD软件对跳马运动员不同踏跳位置进行仿真研究。黄尚军等[4]运用Open Sim 软件对落地动作进行仿真研究。Yu 等[5]运用Matlab软件对蹦极跳进行仿真。
Anybody、LifeMoD、Open Sim 等软件的特点:①Anybody软件把人当作刚体,分析其内在的肌肉骨骼系统,广泛运用于康复医疗领域。②LifeMoD 运行是在ADAMS平台上完成的,ADAMS 平台更适合机械系统的仿真[6]。③Open Sim软件必须要有测力台配合,更侧重于肌肉对形态参数的控制,广泛应用于动作的神经肌肉控制策略的研究等方面[6]。
选择Matlab / Simulink进行仿真的原因:这款软件支持连续与离散系统以及连续离散混合系统,也支持线性与非线性系统,还支持具有多种采样频率的系统,以仿真较大复杂的系统[7]。Matlab软件不仅是功能强劲的数学软件,也是一个十分出色的仿真工具,它正成为国内外控制领域最流行的仿真软件[8]。
主要以健美操基本难度动作中的静力性力量动作B142(直角支撑)为例,分析动作成功完成时的髋关节角度范围,并进行仿真。B142 动作的完成条件是:双手支撑整个身体,手臂撑于身体两侧,只允许双手触地;屈髋且双腿平行于地面[9]。根据成年人各体段质量、质心位置对体重和身高的二元回归方程来建立数学模型,运用求解此类方程模型和Matlab 的解析功能计算出其数值解,利用仿真技术Simulink 库中的图形建模方式模拟人体的运动轨迹,建立B142 动作系统的动态模型,探求该运动的规律和特性,找出影响B142 动作的关键因素,在训练及教学方面给予有用的参数和信息,从而达到事半功倍的目的。
1 B142 动作数学模型建立
1.1 建模依据
(1)各体段惯性参数。运用《中华人民共和国国家标准GB / T17245—2004》提供的成年人各体段质量、质心位置对体质量和身高的二元回归方程[10-11]获得参数。
(2)静态稳定理论。稳定性分为静态稳定和动态稳定。分析静力性动作及判定平衡的稳定性必须从人体质心(COM)或重心(COG)相对于支撑面的位置来确定[12]。支撑面是由各个支撑部位的表面及它们所包围的面积构成[13]。静态平衡动作中,当人体质心的投影落在支撑面内,人体就处于稳定状态[12]。在B142 动作中,人体的质心投影落到双手及它们所包围的面积内。
1.2 人体质心位置
人体技术动作在矢状面上投影图放到OXY 直角坐标系里,确定各关节点的位置,连线构成人体单线图(见图1)。根据人体惯性参数回归方程,求出人体各体段质量Pi及质心位置,并确定质心的横坐标Xi,纵坐标Yi;进一步求出各体段的重力矩PiXi和PiYi。根据力矩定理,得出人体质心的坐标[14]:
人体质心的横坐标
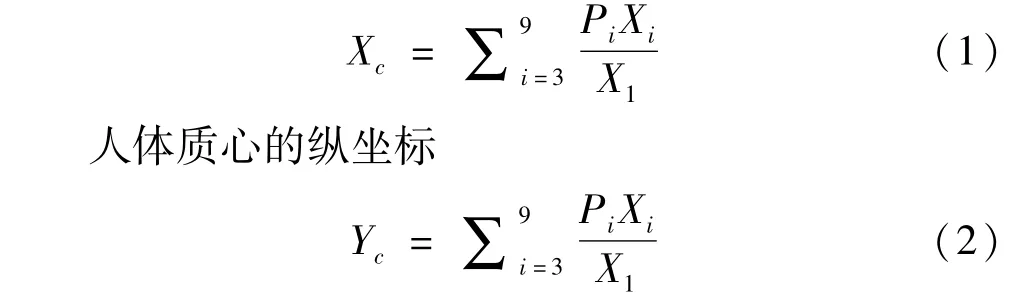
式中,X1为体质量,kg。
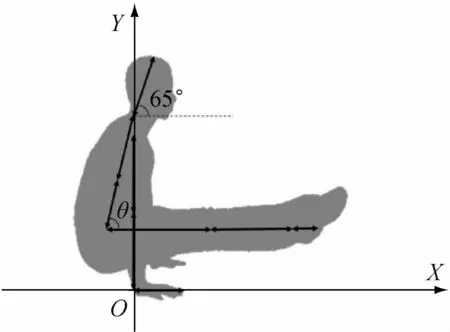
图1 B142动作示意图
1. 3 模型假设
(1)假设人体在B142 动作平衡状态时X 轴的转矩为零。
(2)假设头顶点和颈椎点的连线与X 轴的夹角为65°。
(3)假设平衡状态时,人体质心在X 轴的投影落到手掌部位。
(4)假设手掌长度占手长度的60%[15]。
(5)假设在动作完成过程中,上肢垂直于地面。
(6)假设髂前上棘点、胫骨点和内踝点在一条直线上。
1. 4 模型建立
在动作完成过程中,假设上肢垂直于地面,所以大臂、小臂对坐标原点的力矩为零,不需要计算其质量和质心位置,也不需要建模;只需对头、上躯干、下躯干、大腿、小腿、脚、手进行质量、质心及力矩的计算及建模。
参照《中华人民共和国国家标准GB / T17245—2004》,体段质量:

式中:B0、B1、B2分别为回归方程常数项、体质量、身高的回归系数;X2为身高,mm。
体段质心位置:

式中:B′0、B′1、B′2分别为回归方程常数项、体质量、身高的回归系数。
体段重力矩:

头、上躯干、下躯干、手、大腿、小腿、脚等体段(式中分别用下标3、4、5、6、7、8、9 代替)质心的横坐标如以下公式所示:
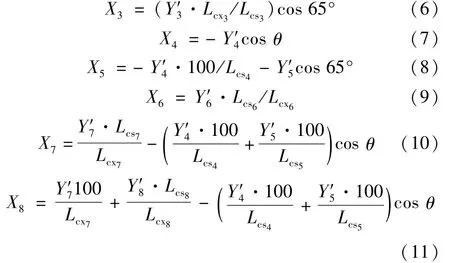
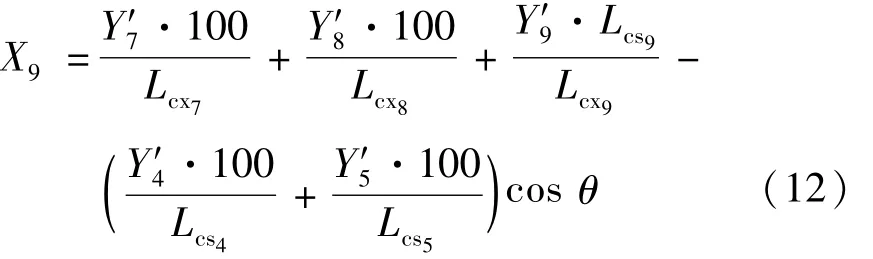
式中Lcs指各体段质心上部尺寸占本体段全长的百分比,Lcx指各体段质心下部尺寸占本体段全长的百分比,θ指髋关节角度。
2 Matlab/ Simulink仿真
2.1 各体段质量、质心及力矩的仿真子系统
根据式(1)~(12)所建立的数学模型,在Matlab /simulink环境里建模,得到各体段的力矩模型子系统,如图2 所示。
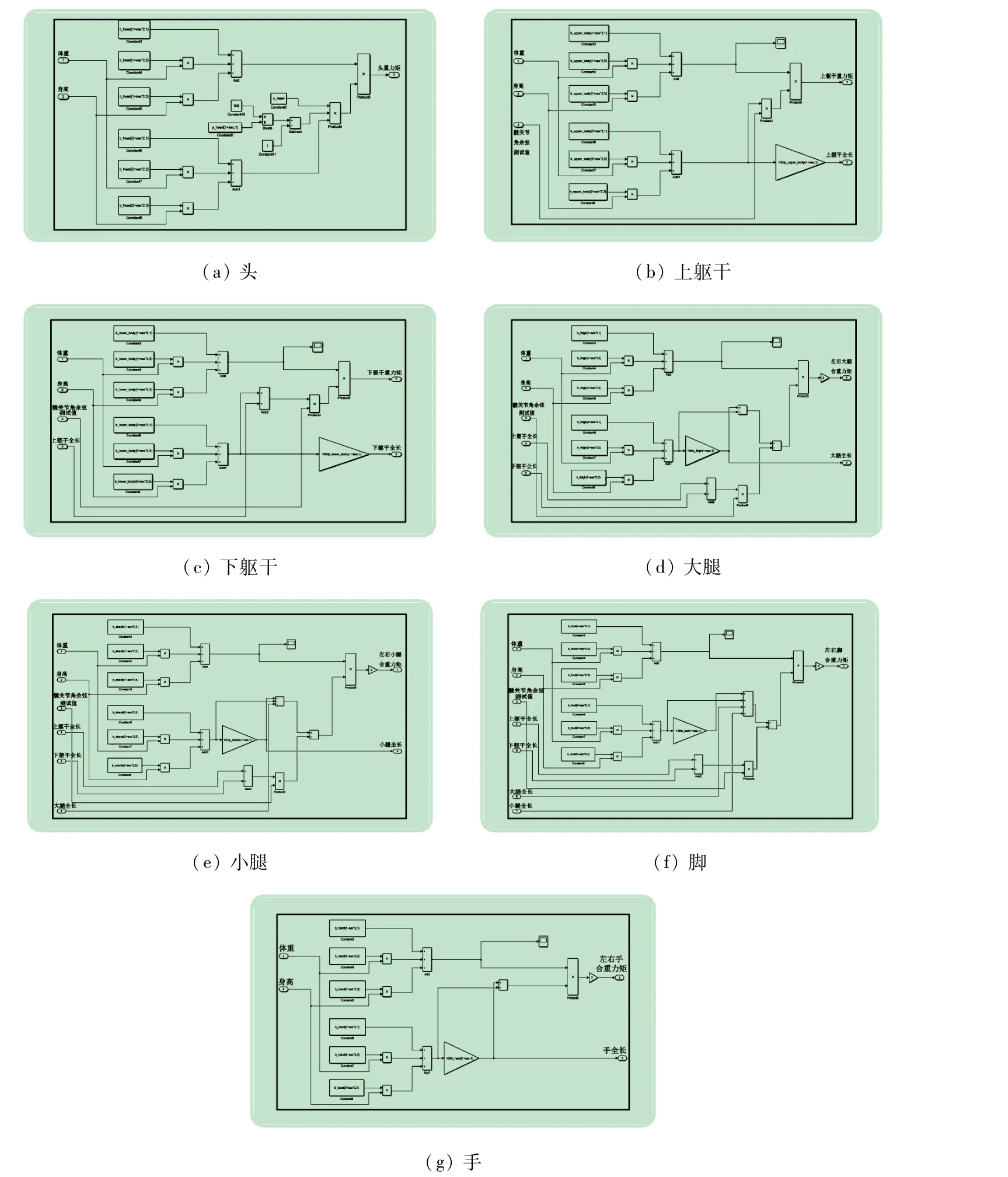
图2 各体段的质量、质心及力矩仿真图
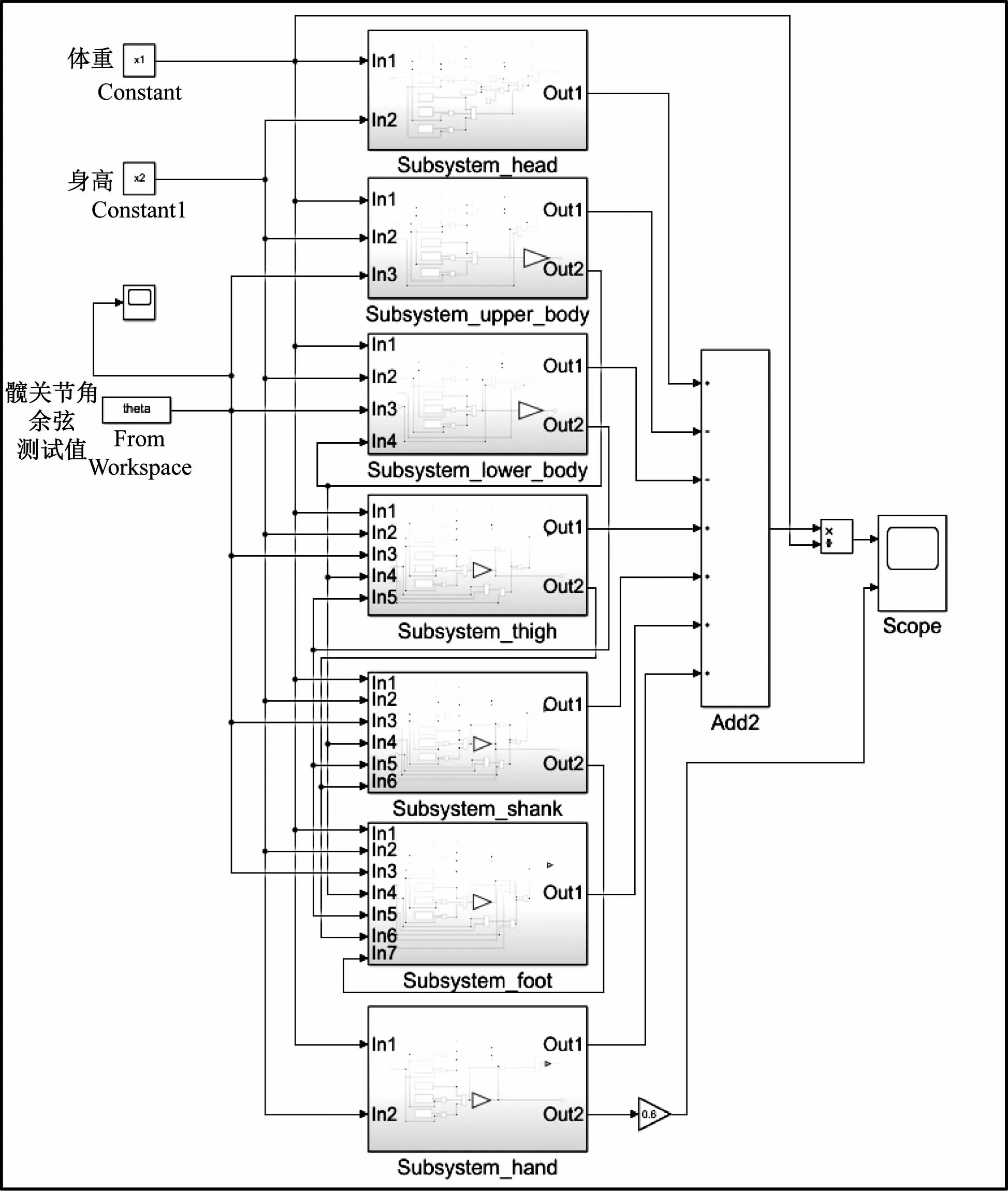
图3 仿真系统总图
2.2 仿真总系统
在得到头、上躯干、下躯干、大腿、小腿、脚、手等7个体段的力矩模型子系统后,根据式(2),得到B142动作的仿真总系统(见图3)。仿真总系统的输出是计算人体总质心在X 轴的坐标和手掌部位在X 轴的坐标范围[12],计算出质心坐标在X轴方向落入掌心所对应的髋关节角度范围。
2.3 仿真模型结果分析
(1)保持B142 动作平衡时相同性别和体重、不同身高成年人髋关节角度比较。国家卫健委《中国居民营养与慢性病状况报告(2015 年)》公布,全国18 岁及以上成年男性和女性的平均体质量分别为66 kg和57 kg[16]。实验以体质量66 kg 不同身高(1. 50 ~1. 78 m)的男子和体质量57 kg不同身高(1. 45 ~1. 73 m)的女子为例进行系统仿真(见图4)。体质量66 kg的男子随身高递增,动作处于平衡状态时,髋关节角度范围递减。身高1. 50 m 男子的髋关节角度范围是69. 49° ~88. 47°,差值为18. 98°;身高1. 78 m 男子角度范围是68. 21° ~84. 30°,差值为16. 09°。体质量57 kg,身高1. 45 m 女子的髋关节角度范围是67. 74° ~87. 02°,差值为19. 28°;体质量57 kg,身高1. 73 m 女子的髋关节角度范围是69. 14° ~83. 19°,差值为14. 05°。
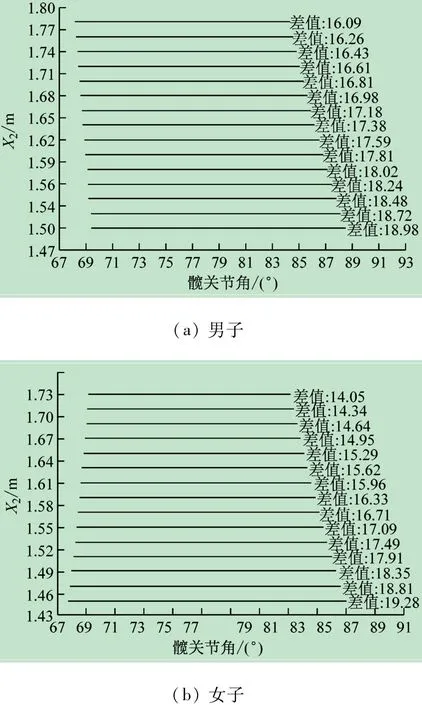
图4 男子、女子随身高递增髋关节角度变化图
(2)保持B142 动作平衡时相同性别和身高、不同体质量成年人髋关节角比较。国家卫健委《中国居民营养与慢性病状况报告(2015 年)》中公布,全国18 岁及以上成年男性和女性的平均身高分别为1. 67 m 和1. 56 m[16]。以我国成年男子和女子的平均身高水平为例,选取身高为1. 67 m 的男子随体质量不同(55 ~83 kg),其髋关节角度数据和1. 56 m的女子随体质量不同(45 ~73 kg)的髋关节角度数据进行系统仿真(见图5)。身高为1. 67 m 男子随体质量的递增,髋关节角度范围由68. 89° ~85. 45°(差值为16. 56°)变化为68. 32° ~86. 41°(差值18. 08°)。身高为1. 56 m女子随体质量的递增,髋关节角度范围由68. 23° ~84. 40°(差值为16. 17°)变化为68. 37° ~86. 21°(差值为17. 84°)。
(3)保持B142 动作平衡时相同体质量和身高、不同性别成年人髋关节角度比较。分别对相同身高和体质量的男子,相同身高和体质量女子的数据进行系统仿真,得到其髋关节角度范围。身高1. 56 m,体质量57 kg的男子髋关节角度范围是69. 40° ~87. 15°(差值为17. 75°);身高1. 56 m,体质量57 kg的女子髋关节角度范围是68. 38° ~85. 27°(差值为16. 89°)。身高为1. 668 m,体质量66 kg的男子髋关节角度范围是68. 68° ~85. 76°(差值为17. 08°);身高为1. 668 m,体质量66 kg的女子髋关节角度范围是68. 95° ~84. 45°(差值为15. 50°)。
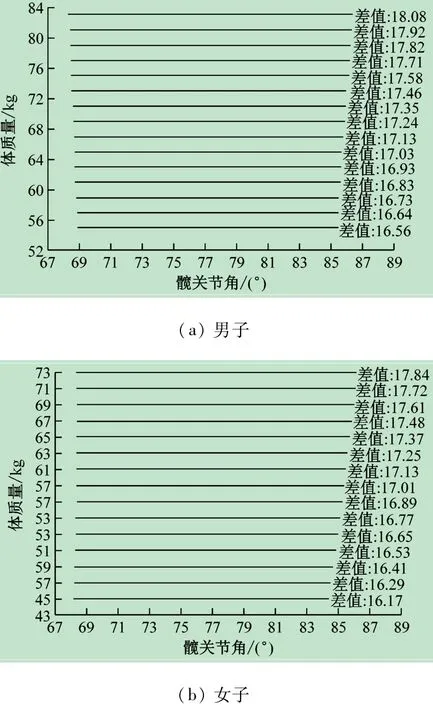
图5 男子、女子随体重递增髋关节角度变化图
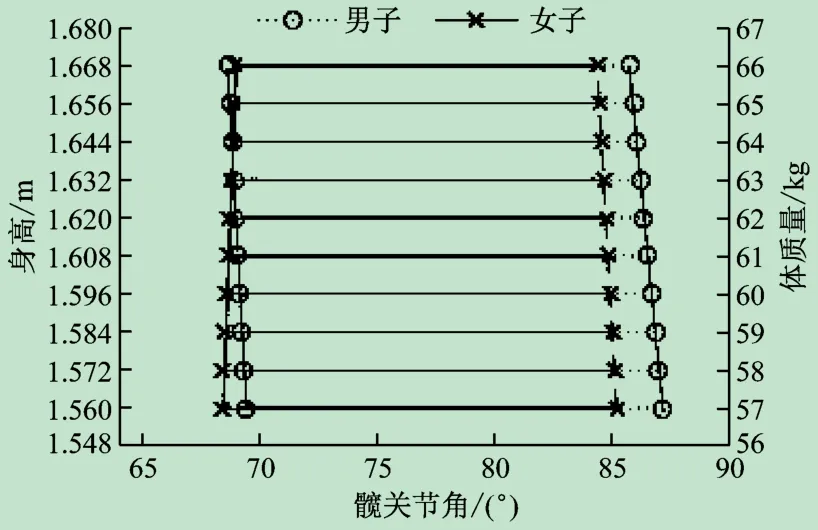
图6 不同性别运动员髋关节角度范围图
3 结 语
在一系列假设的情况下,通过数学模型求解,得到健美操B142 动作的仿真数据。通过3 组数据的比较,得出以下结论:
(1)相同体质量男子随身高的递增,髋关节角度范围递减;相同体质量女子随身高的递增,髋关节角度范围递减。
(2)相同身高男子随体质量的递增,髋关节角度范围递增。相同身高的女子随体质量的递增,髋关节角度范围递增。
(3)相同体质量、相同身高的男子比女子髋关节角度范围大,成功动作的姿态调节范围更大。
本研究中,仿真得到的结果与实际动作有一定的差距。在后续研究中,应尽量减少实验假设,在原有数学模型基础上加上需要考虑进去的影响因子,对模型进行调整,使仿真结果更接近于真实情况。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中国典型病例大全(2022年9期)2022-04-19
气象水文海洋仪器(2021年4期)2021-12-11
北京航空航天大学学报(2021年4期)2021-11-24
冰雪运动(2020年4期)2021-01-14
中成药(2017年6期)2017-06-13
中华骨与关节外科杂志(2017年1期)2017-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
应用科技(2015年5期)2015-12-09
航天器工程(2014年5期)2014-03-11