航母舰载机阻拦及起飞过程综合控制
2020-09-14 08:31许允之王仁顺张可馨
实验室研究与探索 2020年7期
许允之, 王仁顺, 张可馨
(中国矿业大学电气与动力工程学院,江苏徐州221116)
0 引 言
航空母舰对于我国维护海洋权益意义重大,其威慑力强、打击范围广,我国已成为当今世界上少数能够建造现代航母的强国,能够较好地体现我国的国防水平[1]。舰载机承担航母上的重要作战任务,其起飞降落是目前航母上公认的危险系数最高的作业,研究舰载机的阻拦和起飞过程可以降低危险事故发生,同时有利于提升我国国防实力。
国内外均对舰载机拦阻降落和起飞过程进行了大量研究。西方国家早在20世纪50年代开始对阻拦索动力学特性进行了相关研究[2],本世纪初美国便开始了对先进阻拦装置的探究[3]。我国起步较晚,但发展迅速,取得的显著的研究成果。张智等[4]将有限元方法引入阻拦索动力学,对阻拦索张力进行建模分析;张晓谞等[5]提出以阻拦电机的新型电磁阻拦装置,并提出了基于转矩的阻拦闭环控制,喻浩文等[6]对舰载机起飞过程建立部件级动力学模型,通过实验对比验证了模型的准确性。本文根据电磁理论对舰载机起飞和降落过程进行建模分析,建立了闭环综合电磁装置控制系统,对舰载机起飞、降落和复位过程进行综合控制。
1 电磁阻拦索原理
1.1 电磁阻拦装置系统构成
如图1所示,电磁阻拦系统主要由阻拦索、感应块、缓冲装置、电感线圈、电源以及控制器等组成[7]。当舰载机降落时,忽略舰载机偏航,假设其钩索处正好为阻拦索的中央位置,则舰载机受到来自阻拦索的力可认为大小相同且关于舰载机对称,为简化分析将舰载机看作为一个质点进行受力分析。
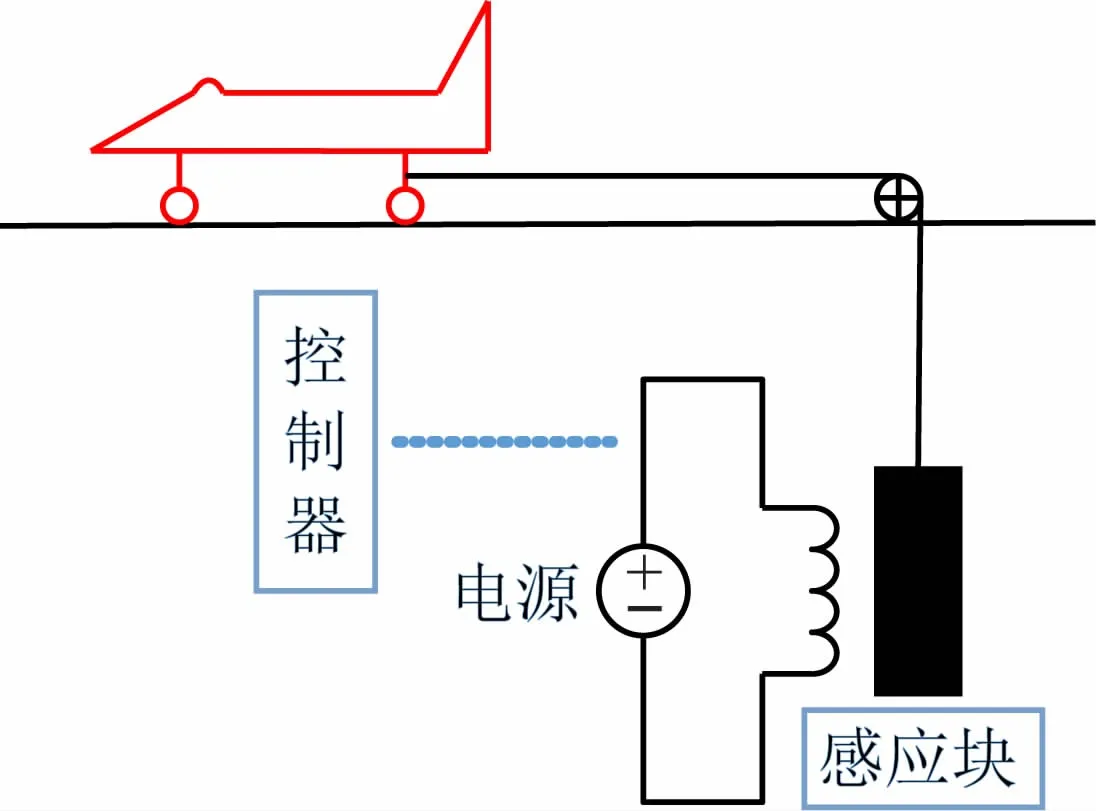
图1 降落时电磁阻拦系统示意图
1.2 电磁阻拦装置建模
对舰载机进行受力分析,结合牛顿第二运动定律,其受力分析图如图2所示[8],并且其中存在以下关系:

式中:Cx代表阻力系数;ρ代表空气密度;S0代表机翼正投影面积;D代表空气阻力方程。

图2 舰载机受力分析图
根据图2可得:

当舰载机钩到阻拦索并在航母上滑行时,由于滚动摩擦力较小可以忽略,令Ff=0,则式(1)变为

结合空气阻力方程可得:

根据能量守恒定律和安培力计算公式可以得到以下关系:

式中:v0表示舰载机的初始速度;M表示舰载机的质量;I0代表螺线管中的初始电流;L表示电感线圈电感值大小;N为电感线圈匝数;k为常数。
根据式(6)可得线圈供电电流
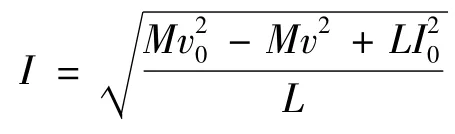
将其代入式(9)可得:

对式(10)两边积分可以得到:

2 舰载机降落过程仿真分析
2.1 舰载机降落过程相关参数
根据文献[2]中舰载机建模使用的相关参数,本文选用与该型号舰载机相近的参数范围进行研究,具体参数值如下:舰载机质量M=20 t,飞机最小速度vmin=5 m/s,飞机初始速度v0=60 m/s,跑道中心线距滑轮距离X=16 m,电感线圈值L=5 H。
由于在舰载机阻拦降落过程中要求最后可靠停在航母跑道上,即vmin=0,但在建模分析时忽略了摩擦力与空气阻力等因素,为保证仿真结果更接近实际情况,假定飞机最小速度并不为零,而是取vmin=5 m/s。但由于阻力等因素的存在,依然可以确保舰载机在安全拦停距离内可靠降落。
2.2 舰载机降落时电流与速度关系
由图3可以得知,当电流取最大值,舰载机的速度为最小值时,电流变化率为最小;当电流变化率取最大值,舰载机的速度同时取得最大值时,电流值为零。由于飞机在刚刚着陆时其速度达到最大值,根据图3需要电磁装置提供一个最大的电流变化率来产生最大的电磁阻力,从而使舰载机做减速运动,并在可靠距离内滑行并最终停止在航母上。
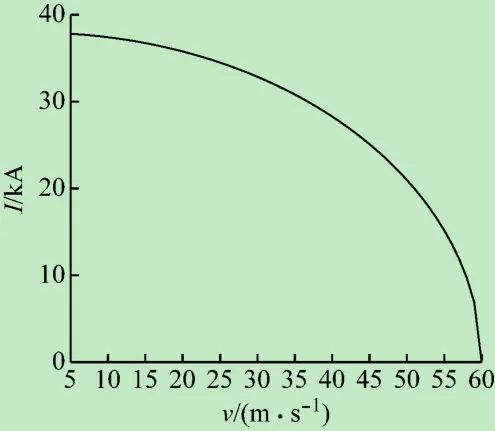
图3 电流与速度关系曲线
2.3 舰载机降落时电流与时间关系
为了便于利用控制器对电磁装置电流进行控制,需要找到电流与时间的变化关系,根据式(11)可得:

代入
即可得到电流与时间的变化关系,代入相关参数,采用MATLAB软件可得到两者变化关系曲线如图4所示。
由图4可知,舰载机降落时电流随时间的变化曲线与电流随速度变化曲线类似。
2.4 电流控制
采用Matlab软件搭建Simulink电磁阻拦仿真模块,其仿真模型如图5所示,其中加速度输入由斜坡输入和积分环节组成。
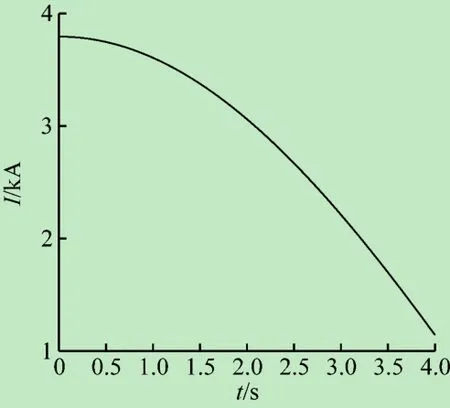
图4 电流与时间关系曲线
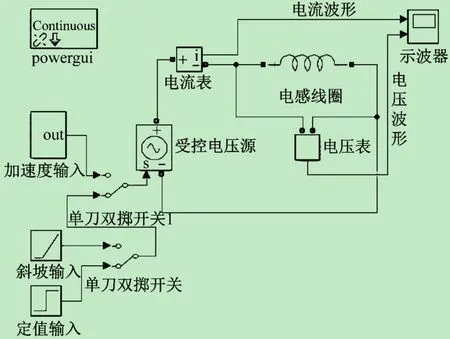
图5 电磁阻拦控制回路仿真电路图
改变不同的受控电压信号形式,包括定值输入、斜坡输入以及加速度输入形式,得到的电感线圈的电压电流波形分别如图6~8所示。
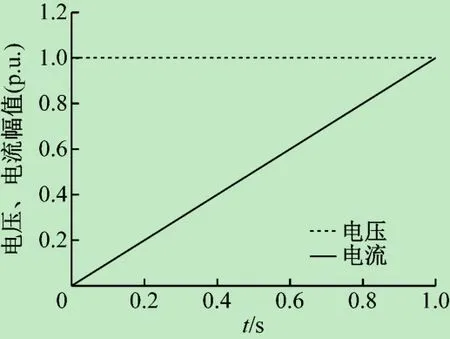
图6 受控电压源控制信号为定值
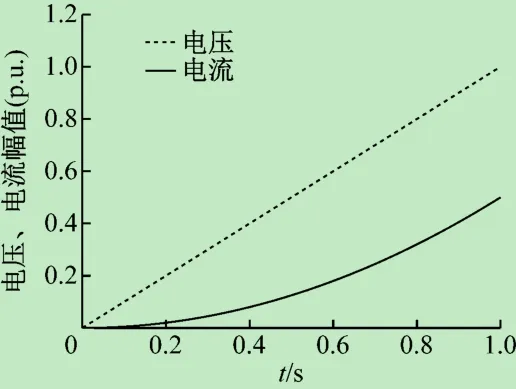
图7 受控电压源控制信号为斜坡给定

图8 受控电压源信号为加速度给定
根据上述3种电压控制信号波形对应的电感线圈电流分析可知:所加电压控制信号的电压越大,其对应的电流变化率越大;所加电压控制信号为加速度给定时,其后期电流变化率较好。
考虑到舰载机降落时开始需要提供巨大的电磁阻力,故应考虑加一个较大的控制信号电压,并使其以2次或更高次形式迅速减小,以提供足够的电磁阻力使舰载机平稳停止。采用Simulink搭建模块模拟舰载机降落时电流曲线,Simulink框图以及仿真曲线分别如图9、10所示。
2.5 复位过程
考虑到舰载机降落以后电磁感应块降落到最顶部,为保证第2架舰载机的连续降落需要改变控制信号,依靠电磁力将磁铁推到顶部初始位置,以保证承载多架舰载机的连续降落过程。
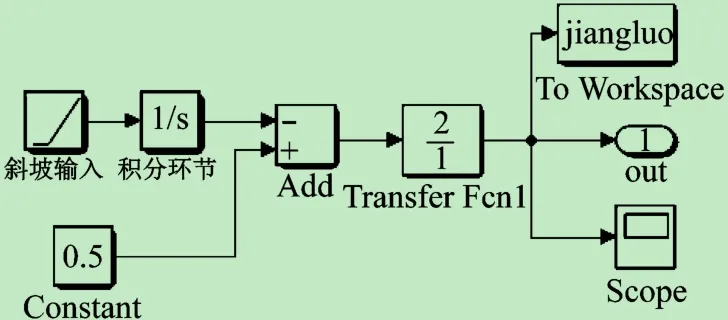
图9 舰载机降落时模拟电流框图

图10 降落时电磁装置电流示意图
3 舰载机起飞过程仿真分析
3.1 舰载机起飞过程建模分析
与舰载机降落过程相对应,可以利用电磁发射装置对舰载机进行弹射起飞,电磁弹射装置系统组成示意图如图11所示。由于此时摩擦力等为阻力,选取初始速度为v0=0,相比于阻拦降落过程建模分析,舰载机起飞时部分受力分析发生改变,此时重力和电磁力为舰载机起飞提供动力,由阻拦索带动舰载机加速达到舰载机需要的发射速度,为了便于同降落过程对比,取发射速度等于降落时的初始速度,即v0=60 m/s,同时应考虑航母航速、舰载机质量等不同参数情况下保证将舰载机发射出去[9]。

图11 起飞时电磁弹射系统示意图
对起飞时舰载机进行受力分析可得:

结合空气阻力方程可得:

根据能量守恒定律可得电感线圈中供电电流:

同降落过程分析类比可得:
即

3.2 舰载机起飞时电流与速度关系
结合式(16)可以得到舰载机弹射起飞时电流和速度的关系曲线,如图12所示。同图3对比发现,舰载机起飞和降落时速度与电磁装置电流两者之间的关系变化规律相同。
3.3 舰载机起飞时电流与时间关系
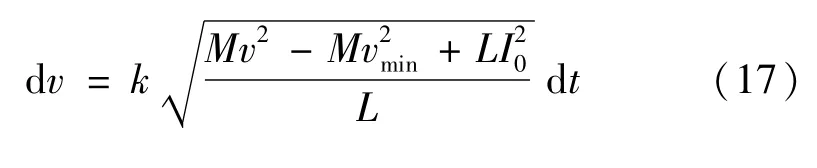
将式(18)变换,同理可得到速度和时间的关系:

将式(19)代入式(16),即可得到舰载机弹射起飞时电流与时间的变化关系曲线,见图13。

图12 舰载机起飞时速度与电流关系图

图13 舰载机起飞时电流与时间关系图
对比图4和图13可以发现,舰载机降落和弹射起飞时电流与时间关系不同,根据这两者的区别需要采用不同的控制信号对电流进行控制。
3.4 电流控制
根据图12中舰载机起飞时速度与电流两者之间的关系,同时考虑到舰载机起飞时其速度是逐渐增大,因此需要在初始时刻加上电压信号,然后调节可控电压源使得电流值以2次或者更高次形式快速增大,从而确保舰载机在短时间内获得足够的前进推力,依靠电磁装置实现舰载机的弹射起飞。
为实现上述过程考虑根据电流与时间曲线模拟电流信号,其Simulink仿真框图如图14所示,得到的电流曲线如图15所示。
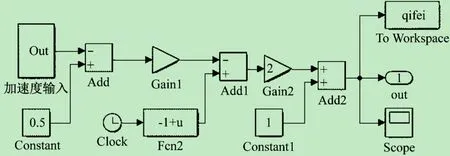
图14 舰载机起飞时模拟电流框图

图15 起飞时电磁装置电流示意图
3.5 复位过程
考虑到舰载机起飞后电磁感应块降落到最底部,为保证第2架舰载机的连续起飞需要利用控制系统,利用电磁力将感应块推到顶部,完成复位,以保证承载多架舰载机的连续弹射起飞过程。
4 电磁装置改进方案
4.1 电磁装置灵敏度分析
航母进行舰载机的降落、起飞和复位过程是一项十分复杂的工作,需要考虑到不同舰载机冲索速度、舰载机不同型号、外界阻力干扰等多种复杂情况[10],根据上述分析中发现舰载机起飞和降落过程原理类似,以舰载机降落过程为例,对相关参数进行灵敏度分析。
(1)不同初速度时仿真分析。考虑到舰载机在停落航母时初速度难以保证相同,当冲索速度不同时,电磁阻拦装置需要提供的能量也不相同,采用的控制信号也需要相应调整[11]。选取舰载机的质量为20 t,初始速度分别为50和60 m/s进行仿真实验,得到的速度随时间的变化关系如图16所示,其中速度与时间包围的面积即为舰载机驶过的拦停距离。
由图16可知,当舰载机的质量相同而冲索初速度不同时,虽然两者速度降为零的时间几乎相等,但舰载机的初速度越大,其速度降落过程的拦停距离也会越大;同时考虑到P=Mv2/2,故初速度越大,舰载机具有的动能越大,电磁阻拦装置需要提供更大的能量让舰载机可靠停止,拦阻索承受的拉力也随之增大,所以为保证舰载机的可靠降落,对舰载机的初始速度有一定的要求。

图16 不同初速度时舰载机的速度和时间关系
(2)不同舰载机质量时仿真分析。考虑到航母功能多样性,同一艘航母会进行多种类型的舰载机起落,并且同一种类型的舰载机在载荷不同时其质量也不尽相等,因此需要考虑舰载机质量不同时对电磁阻拦装置的影响。选取舰载机的初始速度为60 m/s,分别采用质量为18、20和22 t的舰载机进行仿真分析,得到的速度随时间的变化关系如图17所示。
由图17可知,当以相同的舰载机冲索初速度,分别采用不同质量的舰载机阻拦时,可以发现舰载机的拦停距离受舰载机质量影响较小,并且后期的舰载机速度变化比较接近匀减速运动,既能快速将速度降为零,同时也能保证驾驶员的舒适度。同理根据P=Mv2/2,故舰载机质量越大,舰载机具有的动能越大,电磁阻拦装置需要提供更大的能量让舰载机可靠停止,拦阻索承受的拉力也随之增大,需要根据阻拦索承受的最大拉力等实际情况确定舰载机停靠的最大质量。

图17 不同质量时舰载机的速度和时间关系
4.2 电磁装置的优化
由于考虑到不同型号舰载机、不同初始速度等复杂情况下的舰载机起飞、降落和复位过程,本文对控制器进行统一设计,不仅让电磁装置的电流可以调节,并且电感线圈的电感值也能在某个范围内进行调节,以满足不同情况下的需求,同时考虑到电磁兼容的问题,使电磁阻拦装置得以进一步广泛应用。
4.2.1 电磁兼容
由前面分析过程可知,舰载机主要包含起飞、降落和复位过程,并且这3种状态下舰载机所处的电磁环境也不完全相同,其中当舰载机远离航母时,电磁装置对其影响相对较小;当舰载机起飞和降落过程时受到电磁影响较大,现代舰船雷达的辐射功率可产生高达10 kV/m的峰值场强,从而当舰载机经过高场强区时会感应出大电压和电流,易引发安全事故[12]。故电磁装置设计时应该考虑提高舰载机屏蔽性能的措施,从而降低电磁装置带来的危害。
其中具体提高舰载机屏蔽性能的措施为:减小和控制舰面电磁环境,关键是舰载机起降航道区域的电磁环境;采用电磁屏蔽涂料提高舰载机抗电磁辐射能力,如采用化学镀法设计舰载机机柜轻质门[13]。
4.2.2 可调电感实现方法
由于考虑到不同情况下的舰载机起飞、降落和复位过程,本文设计电感线圈的电感值也能在某个范围内进行调节,从而防止电路电流过大而引起安全问题,以满足不同情况下的安全需求。
(1)改变电感自身可变参数。考虑到铁心电抗器中电磁材料的磁导率远远大于空气的磁导率,所以计算时整个磁路的磁阻可以忽略电磁材料的磁阻,铁心电抗器的电感值计算公式为[14]:

式中:μ0为空气磁导率;Rm为磁路中的磁阻;Rm0为气隙中的磁阻;N为线圈匝数;S0是气隙的等效导磁面积;l0为铁心电抗器磁路中气隙长度。所以除了通过调节电感线圈匝数可调节电感值外,还可以通过调节电抗器磁路的磁阻可以实现对电感值大小的改变。
(2)采用外电路控制改变电感值。采用晶闸管(SCR)与固定参数的电抗器串联,然后通过控制晶闸管导通角来控制流过电抗器的电流,从而等效为对电感值进行控制,其中晶闸管控制的电抗器电路图如图18 所示[15]。
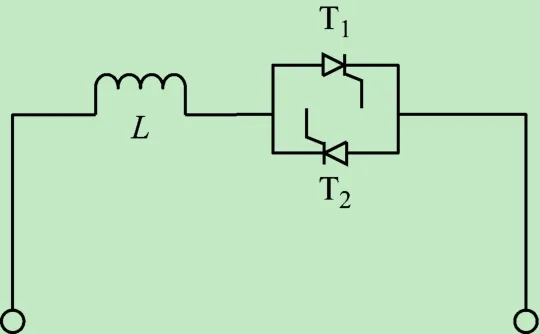
图18 晶闸管控制电抗器电路图
4.2.3 闭环综合电磁装置控制系统设计
为保证不同舰载机型号、舰载机在载重不同、存在摩擦力和空气阻力等干扰多种复杂情况下依然可以按照设定的速度进行起飞和降落,本文设计了闭环综合电磁装置控制系统。其中控制器可以调节电磁装置中电流大小和线圈电感大小;检测装置可以将舰载机的速度数据实时反馈给控制器进行比较,结合控制算法实现系统的无静差控制,同时可以检测感应块的位置在起飞和降落过程后进行复位操作,以保证多架舰载机的连续起飞和降落(见图19)。由于闭环综合电磁装置系统的准确性和抗干扰性比较强,同时利用先验概率更新规则可以进一步提升闭环系统的检测性能[16],能够满足复杂情况下的多种需求。

图19 闭环综合电磁装置控制系统结构框图
5 结 语
本文根据电磁理论对舰载机起飞和降落过程进行建模分析,结合受控电压源模拟对电感线圈电流进行控制,根据建模分析得到了电流随时间的变化关系,可以作为后续闭环综合电磁装置控制系统的给定信号,并针对舰载机质量和初始速度的改变对电磁装置参数进行灵敏性分析,探究保证舰载机可靠完成降落以及起飞过程,考虑到多种复杂情况下舰载机依然可以可靠进行起飞和降落,为增强系统的准确性和抗干扰能力,建立了闭环综合电磁装置控制系统。
由于本文对舰载机降落和起飞建模过程中的分析忽略了摩擦力和空气阻力,舰载机运行过程偏离中心线,滑轮的运动过程等诸多因素,故仿真的结果需要进一步修正以贴合实际情况,还需要继续分析与完善。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
资源信息与工程(2021年5期)2022-01-15
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年10期)2020-11-27
小学科学(学生版)(2019年10期)2019-11-16
中国生物医学工程学报(2019年4期)2019-07-16
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
中学生数理化·高二版(2016年5期)2016-05-14