
电赛强悍 屡败屡战 读硕再见
2020-09-12 14:12刘岱轩
大学生 2020年9期
刘岱轩
第一项比赛,第一次答辩
我大学参加的第一项比赛是创客比赛,这也是学院创办的第一届创客比赛。之前我对仿生机器人有很深的兴趣,萌生了制作四足机器人这个想法。这实施起来并不容易,从起初框架设计到编程都存在许许多多的问题,例如四足框架材质的选择不当导致了整体移动的不稳,如何协同控制完成动作配合也是个问题。项目一度停摆。于是我开始考虑后续发展规划。这个过程中我发觉养成查资料、写笔记的习惯很有用,出现问题后可以回顾整个过程,梳理问题所在。
在简单的修正与规划后,我把项目难度做了调整,简化为使用切割的塑料板来作为四足框架,然后自己去设计各个部件,自己拿小刀去切割,自己重新整理代码逻辑,最终完成了简易四足机器人的设计。虽然这次项目难度并不大,但是是一次很好的锻炼,为后来的比赛做了很多铺垫。
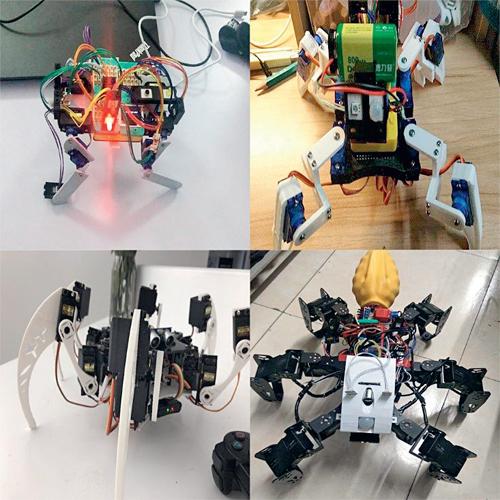
从四足机器人到六足机器人
四次电赛,四次提升
大学期间大大小小的电子竞赛参加了四次,次次体会都不同。
第一次电赛可以说是初次上阵,头一回接触,好在题目不难,简单功能可以逐一查阅资料实现。完成了电路设计与焊接制作后,基本功能已经有了明显的雏形,接下来就准备啃一下硬骨头。一些复杂功能向老师进行了咨询,也有了初步的想法。看似一切都在有条不紊地进行中,但是测试当天我竟因时间记错了没能去测试,我感到非常懊恼。
第二次电赛测试时间记住了,东西也做出来了,但是测试结果却出了意外:审题不清,具体实现功能与要求存在偏差。
第三次电赛,现场开题,限定时间,现场制作。题目也审清楚了,测试时间也记清楚了,接下来就是拼实力的时刻了。这时突然发现了自己一个致命的知识盲区,拿到题目后有点茫然,不知道从何下手。时间一分一秒地流失,不像前两次那样有充足的时间去设计。各种问题频出,盲目地翻书查资料,焦躁不安却又无能为力,最后以失败告终。这次比赛让我意识到基础知识的重要性。
第四次电赛,也是我大学期间参加的最后一场电赛,根据自己对于题目的熟悉程度,选择了一个合适的题目,而且还与平时做的项目有联系,可谓是八字有了一撇。接下来就是紧锣密鼓的准备。这次电赛不再像前三次那样没有头绪,经过不断地学习,已经有了一定的理论基础,更重要的是多次的动手实践,积累了一定的经验。由于平时的锻炼与准备,对大赛充满信心,所以整个过程还算顺利。虽然也有困难,但再也不像前三次那样,学会了变通地去解决问题。第四次电赛总体来说是成功的,最后获了奖。
大学生创新创业发明的四足仿生机器人
最后一次答辩,最后一项设计
大学的毕业设计,开始时,从选题到准备都有条不紊,但是突如其来的疫情打破了所有的计划。无法返校很苦恼,因为我做的是实物型毕设,所需的材料和工具比较多,它们大部分都在学院实验室。指导老师和我沟通后,决定把工具从实验室邮寄到我家,并对整个毕业设计做出合理的调整。
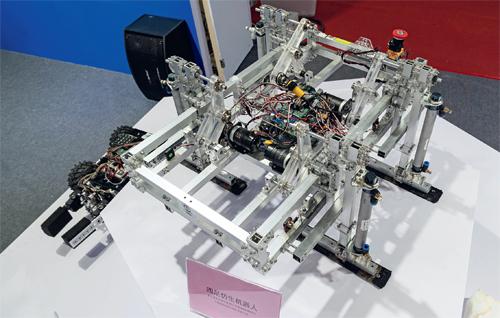
我的毕业设计是设计制作一台激光雕刻机,大家一听到雕刻机可能想到的都是四四方方的大架子的样式,而我的毕业设计是一台移动式的雕刻机。它不再拥有框架限制,以此来实现无幅面限制的雕刻。这个想法也是来源于市场需求,目前市场上缺少面向普通用户使用的大幅面雕刻机。
毕设就这么如火如荼地开始了,大学四年所有的积累都汇聚在这最后一项设计上了。从开题到中期,再到最后的撰写论文和答辩,不能说是得心应手但也是游刃有余。四年来参加的大大小小的比赛,既提升了能力也锻炼了心智。当然这个毕设并不完美,还有很大的提升空间。学习还没结束,我会在硕士生涯中继续前进。
移动式雕刻机(简易初始版本)

移动式雕刻机(毕设)
責任编辑:宋明晏
猜你喜欢
制造技术与机床(2022年6期)2022-06-13
玩具世界(2021年6期)2021-04-19
浙江工贸职业技术学院学报(2019年4期)2019-03-11
电子制作(2018年9期)2018-08-04
肿瘤预防与治疗(2015年1期)2015-09-26
水电站机电技术(2014年1期)2014-09-26
中国交通信息化(2014年3期)2014-06-05
机床与液压(2014年5期)2014-04-16
机电信息(2014年23期)2014-02-27
职业教育研究(2011年6期)2011-03-25
