
DP-2 工况下闭合母联电力系统设计
2020-09-12 06:03:22王克虎
船舶与海洋工程 2020年4期
孙 哲,王克虎,徐 楠
(1. 中船邮轮科技发展有限公司,上海 200137;2. 上海外高桥造船有限公司,上海 200137)
0 引 言
对于传统的配备动力定位(Dynamic Positioning, DP)系统(DP-2)的海洋工程船和特种船而言,在进行DP 作业时,其电站均采用孤岛模式,即互为冗余的电站之间的断路器保持断开状态,这样就能将多个电站作为独立的电力系统运行。这种运行方式可降低对电力系统保护的依赖性和隐藏故障的影响。虽然失去冗余系统的一部分风险没有降低,但失去整个电力系统的风险会大大降低。因此,孤岛模式的电力系统广泛应用于DP-2 及DP-2 以上等级的DP 系统中。孤岛模式的电力系统和闭合母联模式的电力系统见图1。
但是,从船东或平台使用者的角度来说,采用孤岛模式的电力系统意味着需配备更多的在网发电机,耗费更多的燃油和运行时间,且电力系统的灵活性大大降低,维护保养的成本和难度更高。
因此,随着海工技术和电气技术的不断发展,闭合母联模式的电站在DP 系统中的应用越来越广泛。闭合母联式电力系统是指在进行DP 作业时,互为冗余的多个电站之间的断路器保持闭合状态,使冗余的电站系统共线工作,为全船提供电力。与孤岛模式的电站相比较,闭合母联模式的电站具有油耗及发电机运行时间更少、电力系统更灵活和容错性更强等优点。

图1 孤岛模式的电力系统和闭合母联模式的电力系统配置
对于闭合母联模式的电力系统而言,其存在的最主要的问题是故障会对不同冗余分组的电站同时造成影响。因此,本文对DP-2 模式下闭合母联电力系统设计的基本原则和设计要点进行分析。
1 闭合母联电力系统设计的基本原则
对于DP 作业的船舶而言,其闭合母联电力系统的设计原则是:当发生的故障可能影响到整个电力系统的正常运行时,连接各冗余电力系统的母联开关及时断开,电网重新配置成孤岛模式,与DP 相关的系统可在孤岛模式下继续运行,不会降低性能(功率、转速和压力等)。概括起来就是闭合母联电力系统应具备在任何情况下以孤岛模式运行,且不影响与DP 相关的系统继续运行的能力。
为实现上述基本原则,在设计闭合母联系统时需考虑以下因素。
1.1 故障发生之后系统的响应
广义上来讲,系统发生故障之后的响应大体上可归纳为以下步骤:
1) 启动所有的备用发电机;
2) 对冗余组内的故障进行隔离;
3) 断开冗余电力系统之间的断路器;
4) 确保系统在孤岛模式下继续运行。
需注意的是,系统的运行模式并非单指配电系统,电站自动控制系统、发电机自动调压系统、发电机调速系统和DP 控制系统的结论分析系统等都要求既能在闭合母联模式下运行,又能在孤岛模式下运行。
1.2 系统的短路故障穿越能力
当电力系统发生短路故障时,会影响整个系统瞬时的电压降(见图2),所有连接在母排上运行的电气设备都会受到影响,对于闭合母排的系统而言,这意味着整个电力系统和所有负载都会受到该电压降的影响。对此,要求闭合母联系统中所有非故障区域的开关和用电负载都能在系统的电压下降-回升期间继续运行,这种能力称为短路故障穿越能力,其设计是闭合母联系统设计的重点,后续将做详细论述。
综上所述,闭合母联电力系统设计是基于冗余DP 系统进行的,在设计中同样需优先考虑DP 系统的预期最差设计工况,闭合母联电力系统的任何单点故障都不允许出现超出预期最差设计工况的现象。因此,需从电力系统的选择性保护、冗余性双路供电、电站管理系统(Power Management System, PMS)和发电机保护系统等方面进行设计。下面对DP-2 模式下的闭合母联电力系统设计进行分析。

图2 系统短路时电压-时间曲线
2 DP-2 模式下的闭合母联电力系统设计与配置
为更好地了解DP-2 模式下的闭合母排设计理念,首先对国际海事组织(International Maritime Organization, IMO)MSC/Circ.645 指导文件的要求进行分析。对于上述DP-2模式,电力系统需分成2 个或2 个以上单独的子系统,当有1 个子系统发生故障时,至少还有1 个其他系统可保持正常运行。电力系统可作为一个整体系统运行(即上述闭合母联模式),但必须设置能在发生短路或过载故障时自动跳开的母联开关,以防止故障从1 个子系统传递给其他子系统[1]。
由IMO MSC/Circ.645 指导文件的要求可知,对DP-2 电力系统的基本要求是可在孤岛模式下运行,或在闭合母联的模式下发生单点故障时能返回到孤岛模式运行,而不会使整艘船舶丢失动力和定位能力。
对于隐藏故障,DP-2 系统只要求整体上能有效预防隐藏故障,即可通过对系统进行监测和报警来消除隐藏故障的影响[2]。对于各断路器,尤其是对于总线上的母联断路器(隐藏故障可能导致故障发生时母排无法有效断开为孤岛模式的配置),该系统并没有特殊的要求。
下面逐一分析组成闭合母联电站的各种配置和满足DP-2 要求的设计。
2.1 过载保护设计
对于闭合母联电站过载保护,可通过配电盘自身硬件、自动PMS 和DP 控制系统中的1种或多种来完成[3],但在系统设计中应充分考虑各种保护方式的协调性。当过载保护系统自身发生故障时,不能导致超出最差设计预期工况的情况出现,具体要求如下:
1) 单台发电机过载不会导致所有在网的推进器进入减载模式。这是一个与开环系统截然不同的设计理念。在开环系统中,为最大程度地保持冗余分组内的发电机不因长时间过载而失电,通常会要求其在网的推进器进入减载模式。由于电力系统为孤岛模式,只有1 个冗余分组内的推进器的推力受影响,不会超出最差设计预期工况的范围。但是,对于闭合母联电力系统,所有推进器都在同一个电网中,若因单台发电机过载而限制所有推进器的负荷,会导致所有冗余分组内的推进器的推力受影响,这显然超出了最差设计预期工况的要求,因此不能因单台发电机过载而使所有推进器进入减载模式。
2) 单台或多台发电机因发生故障而停机不会导致其他正常的DP 冗余分组失电[4]。对于闭合母联电站系统,当发电机因发生故障而停机时,除了对应发电机的断路器跳开以外,与其冗余分组相邻的母联短路器通常也要快速自动断开,以保证正常的DP 冗余组的配电系统不会因受到影响(如短路传播、过载和逆功等)而失电。
3) 母联开关跳开不会导致各DP 冗余组失电。如前文所述,对于闭合母联配电系统,其最基本的设计是发生故障时自动断开各冗余组之间的母联开关,系统重新配置成孤岛模式并正常运行。
2.2 发电机调速器故障保护设计
发电机的调速器主要用来控制发电机的转速,即控制发电机输出的有功功率。发电机转速控制是各发电机并联运行(即负荷分配)的一部分,发电机调速器设计会影响闭合母联电站系统设计。
发电机调速器设计的基本要求是当其发生单一故障(失电、网络故障等)时不会影响其他发电机正常运行。
为更好地理解发电机调速器的设计选型,首先对发电机调速器的2种并联模式(即无差模式和有差模式)进行分析。
1) 无差模式:单台发电机运行时采用这种模式,即设定一个频率(转速),根据负载变化来调整反馈修正值,达到稳定频率的作用。当2台或多台发电机并列运行时,各发电机的调速环会并接在一起,可通过修正调速器参数来使各发电机并列运行,并能使其稳定在固定的预设频率上。
2) 有差模式:发电机的转速-负载曲线是一条下垂的直线,调速系统会根据负载情况修正调整调速环之后的频率,该频率并不是要稳定的频率,需进行二次调速(比如通过PMS 或手动输入来调整),以得到稳定的频率。这样做的目的是,当机组带载率突然变得很高和很低时,防止发电机过载或逆功导致停车。
通过分析可知,无差模式与有差模式的主要区别在于:
1) 有差模式的负荷调整和发电机进网/退网是基于PMS(或手动)进行的,即发电机依靠外部信号控制,与其他发电机调速装置没有直接的电气连接,无发生公共故障的风险;
2) 无差模式是将所有在网的发电机调速环并接在一起,通过数据分享、共同修正来实现负荷分配和发电机并联运行,电站管理单元不参与发电机调速。
由这2种模式的特点可知:有差模式更能保持各冗余分组的独立性,即系统受到公共故障的影响更小;无差模式具有恒频、均载、发电机运行更稳定和经济性好等特点。因此,闭合母排的电力系统通常会采用无差模式运行,但当发生故障时,系统会自动跳回到安全性更高的有差模式。
综上所述,当发生调速器故障时,系统必须跳回到预设的安全模式,即有差模式,由电站管理单元控制各发电机调速,并配合闭合母联电力系统中母联开关的断开(系统配置改为孤岛模式),保证各冗余分组(非故障组)的发电机可在组内继续并联运行。
2.3 短路故障穿越能力
短路故障穿越能力设计是整个闭合母联电站系统设计的重点和难点,因为短路故障穿越能力不仅仅是对配电系统的要求,连接在整个电力系统中的设备(如分配电设备、起动器和变频器等)都需结合短路电流、电压降和选择性保护进行分析研究,并根据闭合母联系统对短路故障穿越能力的要求,对各设备的电气保护参数(尤其是欠压保护)进行合理的设计。
闭合母联电力系统对DP 相关设备和非DP 相关设备都有短路故障穿越能力要求[2]。
2.3.1 DP 冗余组设备的要求
对于DP 相关设备,在发生短路故障期间,所有电气设备(非故障区域)都要保持发生短路故障之前的运行状态不变,即不能因电压降而出现断路器跳开或设备停止运行等状况,涉及的电气系统或设备如下:
1) 推进器和相应的推进变频器不能因电压降而停车或退出DP 状态;
2) 推进器、舵机和发电机组辅助系统(如燃油、滑油、伺服油和冷却水等系统)的泵组不能因瞬时电压降而停泵;
3) 欠压保护系统(如配有)不能在瞬时电压降期间动作;
4) 对于双路供电的直流蓄电池或不间断电源系统,不能因瞬时电压降而导致系统供电在不同的冗余分组间切换。
针对上述要求,在设计过程中,应采用以下设计方法:
1) 对于变频器控制的推进器,由于变频器电源单元内的电容作为蓄能装置,可在很大程度上抵消电压波动,因此对于变频器来说,瞬时电压降通常不会导致变频器停车或跳闸。但是,变频器的控制电路及其电气元件通常无法在瞬时电压降期间保持正常工作,因此会导致整个变频器停止运行,进而导致推进器停车,造成超出最差预期设计工况的情况出现。因此,对于变频器控制的推进器设计,变频器的主供电不需要考虑瞬时电压降穿越问题;对于变频器的控制电路,需使用相同DP冗余分组内的不间断电源供电,以保证变频器的控制电路在瞬时电压降期间的穿越能力。
2) 对于由可调螺距螺旋桨(Controllable Pitch Propeller, CPP)控制的推进器,虽然可通过设置供电回路的断路器来保证推进器和可调桨单元瞬时电压降的穿越能力,但可调桨系统的功率调节速度相比变频器过慢会导致发电机过载,即将故障扩散到非故障的冗余分组,因此可调桨并不适合在闭合母联电力系统中使用。
3) 对于推进器和发电机辅助系统的泵组,主船级规范通常会要求其启动器在电力系统失电之前脱扣,因此启动器的欠压保护不能取消[5],设计时应考虑其启动器欠压保护数值的设置(电压值及延时),既要保证欠压脱扣功能,又要保证其在发生短路故障时,瞬时电压降的穿越能力。泵组启动控制回路的电气元件无法在瞬时电压降期间正常工作,因此对于与独立DP相关的泵组的启动器控制回路,同样需采用相同DP冗余分组内的不间断电源供电,以保证启动器的控制电路在瞬时电压降期间的穿越能力。
对于与DP相关的蓄电池或不间断电源系统,通常仅由相关的冗余分组供电,若要求主/应急双路供电,则推荐供电电路的转换通过手动来完成。
以某半潜项目为例,模拟得到短路故障发生时440V 配电盘和6.6kV 配电盘电压降-时间曲线分别见图3 和图4。
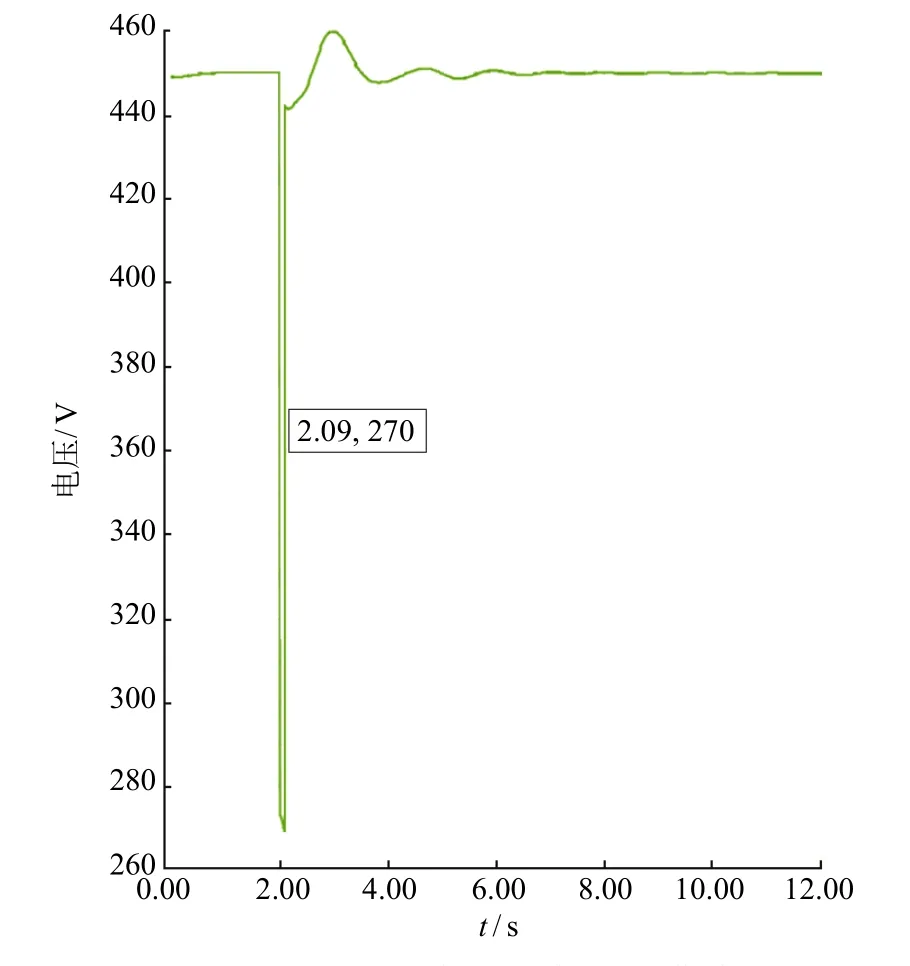
图3 440 V 配电盘电压降-时间曲线

图4 6.6 kV 配电盘电压降-时间曲线
由图3 和图4 可知:短路故障于2.00s 的时间点发生,造成配电盘电压降;随着故障区域被隔离,系统经历0.09s 的时间之后其电压又恢复到了稳态波动的正常范围内。但是,短路故障形成的瞬时电压降在440V 配电盘上和6.6kV 配电盘上有明显的不同:在440V 配电盘上电压降至270V,电压降约为40%;在6.6kV 配电盘上电压降至5.2kV,电压降约为21%。由此可看出,短路故障对中压配电盘电压降的影响要小于低压配电盘。这就是闭合母联电站系统通常只对中压配电盘的母排进行连接,低压配电盘的母排为孤岛模式的原因之一。
2.3.2 非DP 冗余组设备的要求
对于非DP 相关设备,要求在短路故障造成的电压降期间保持断路器或启动器开关的状态,即在故障隔离、电压重新建立之后可不经人为干预自动恢复运行(而不是重新启动),即在穿越期间,断路器或接触器保持闭合。此外,可设计备用泵组切换或备用电源切换来满足电压降穿越的要求,但在设计时必须保证切换的电源来自于相同的DP 冗余分组。
无论是DP 相关设备,还是非DP 相关设备,当短路故障被隔离、系统重新建立电压时,由于发电机自动调压装置的特性,电网电压会出现一个大于正常工作电压的波峰,如图4 中的2~4s 时间段内的波形。该时间段的电网处于过压状态,因此在设计时同样需考虑设备的过压保护和元件的耐压等级,既不能在这段时间内将电气元件损毁,又不能因过压保护动作而导致设备停止运行。
2.4 满足DP-2 要求的闭合母联电力系统单线图例
图5 和图6 为满足DP-2 闭合母联电力系统最低要求的典型系统配置,对于具体的海工项目,可在此基础上根据项目的具体要求增加配置。

图5 满足DP-2 闭合母联电力系统最低要求的典型系统配置(电力)

图6 满足DP-2 闭合母联电力系统最低要求的典型系统配置(控制)
3 结 语
通过本文的分析可知,对于DP-2 系统中闭合母联电力系统的设计,除了要满足IMO MSC/Circ.645 指导文件和各船级社相应规范的要求以外,还需对配电盘、调速器和自动电压调节装置等装置及保护系统的故障进行深入研究,并对发电机、推进器及相关负载的短路电流、选择性保护和短路故障穿越能力进行逐一分析,从而合理设计出满足DP-2 系统要求的闭合母联电力系统。
猜你喜欢
电子世界(2021年15期)2021-09-27 08:57:16
通信电源技术(2021年9期)2021-09-23 07:00:00
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
船舶(2020年2期)2020-05-11 09:35:42
中小企业管理与科技(2019年27期)2019-11-05 00:35:02
科学导报·学术(2019年47期)2019-10-21 21:41:03
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
科技创新与应用(2017年6期)2017-03-23 21:08:37
科学与财富(2016年34期)2017-03-23 09:13:30
