双C型臂X射线机结构设计与结构分析
2020-09-10 07:22:44任晓路
内燃机与配件 2020年19期
任晓路
摘要:随着科学技术的发展,现代机械设计工艺研发也取得巨大的成就。在现代机械领域中越来越多的高精密、大型的设备层出不穷,既改变了传统机械结构,还提升了机械应用水平。双C型臂X射线机正是用以展开精密机械生产的设备。因此,下文主要从双C型臂X射线机的结构设计原则和思路入手,旨在通过对双C型臂X射线机展开框架搭建以及应用。从而为双C型臂X射线机的普及应用和性能优化打下坚定的基础。
关键词:双C型臂X射线机;结构设计;结构分析
0 引言
随着机械技术水平的提升,C型臂X射线机已然广泛地应用于实践活动中。现有的C型臂X射线机主要是单C型臂结构,使用时需要频繁调整C型臂来获取数字图像信息。而在使用过程中,若是频繁地调整C型臂容易出现成影像滞后,甚至是失去重要部位的影像,重新恢复成像需要花费大量的时间,重复调整和重新定位C型臂的角度和位置,此过程费时且呈现出来的成像容易出现不稳定问题,如此严重制约着C型臂X射线机在实践生产活动中的应用效率和应用质量。因此,下文基于单C型臂X射线机的使用不足,给出一种新型的C型臂X射线机的设计思路——双C型臂的结构类型,通过大、小C型臂回转托架结构等,保证在使用过程中能够同时获得不同方位的影像信息,由此减少因为C型臂X射线机设备频繁调整所带来的成像延时等干扰问题,大大缩短操作时间。
1 双C型臂X射线机设计原则与思路
1.1 双C型臂X射线机设计原则
第一,安全可靠。作为一种新型器械,其整机结构设计需要充分考虑到安全系数问题。只有如此才能够避免在使用器械过程中发生意外。如,双C型臂X射线机的机电控制系统必须要设计有安全锁止程序,保证使用机器时的安全可靠性。
第二,低噪音。双C型臂X射线机所应用的场所条件比较苛刻,需要营造静谧的环境。因此要求整机在使用过程中,升降机、C型臂调整定位不会发出噪音。
第三,整体运动灵活符合人体工程学。双C型臂X射线机本质上是人工智能机器人设备,其主要是获取影像资料,为相关决策或者规划制定提供依据。因此,双C型臂X射线机的整体结构要具有柔性化特点,确保整机运动灵活轻便。
1.2 双C型臂X射线机设计思路
基于当前市面上所流行的C型臂X射线机的应用现状可知,其虽然可以实现正位透视和侧位透视,但是需要经过人工角度调整,之后中心旋转才能够得到。这样的X射线机下取得的图像信息存在延时性,严重的话会影响治疗效率。因此展开双C型臂X射线机的设计概念。
第一,在材料选择中。根据C型臂的移动要求,选择高强度、高耐腐蚀性以及高耐磨性的6系列铝合金设备。借助该金属材料所具有优良的加工性能,打造出双C型臂X射线机。
第二,在理论应用中。本文所提出的双C型臂X射线机的设计依靠的是TRIZ理论,該理论探讨如何利用创新方法和创新理论实现对现有的技术手段的深入研究。借助TRIZ理论体系能够掌握C型臂X射线机的现有技术形态,为双C型臂X射线机的发展提供一个方向和设计思路。
第三,双C型臂臂端影像增强器的运动方案。采用大、小C臂,需要提高双C型臂的运动灵活性和协调性,在本设计中采用丝杠机构来实现。这要是因为丝杠机构较为成熟,安全系数较高,能够协调大、小C臂的规格大小。
第四,双C型臂X射线机的旋转机构方案。该设备在使用时,需要根据不同的方位进行旋转,所以,必须达到柔性化效果,能够平稳无噪声无污染的转动。对此本设计旋转运动的传动方案旋转蜗轮蜗杆方案,并且以步进电机作为驱动机构。
第五,双C型臂X射线机十字臂水平运动方案。水平运动主要是指双C型臂X射线机在应用过程中,需要根据不同部位的实际情况进行微调,使其能够初步达到制定的标准位置上。十字臂水平运动是该机械的根本运动方式,本设计主要是通过导轨、滑块、丝杠以及步进电机来实现。
2 双C型臂X射线机结构及设计
2.1 双C型臂结构设计
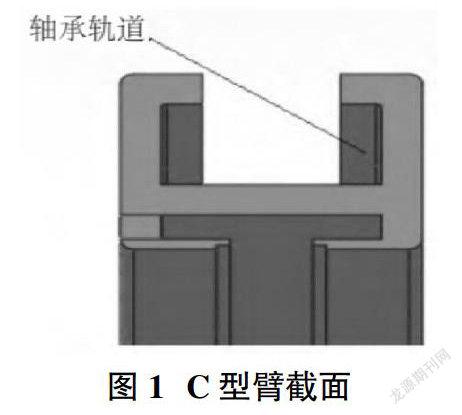
当前,基于triz创新理论对双C型臂X射线机的整体结构展开设计,导入大、小C型臂两套单独成像的机构。大、小C型臂的成像机构是通过固联球管和发射器组成的。通过轴承轨道固定在机械整体的支撑回转托架上,将另一端固定在开口同步带两端,利用伺服电机驱动控制设备实现大、小C型臂做圆周旋转运动(如图1)。整体上来说,双C型臂X射线机的结构设计同单C型臂X射线机差距在于前者多设置一个直径较小的辅助小C型臂,同时采用的固定方式也更加灵活便利。
2.2 C臂回转托架结构
回转托架结构起到支撑C臂垂直方向稳定性的作用。双C型臂X射线机在工作中,技术人员会根据不同方位调整双C型臂X射线机的工作角度,当C型臂垂直于工作台的时候,C臂就需要同回转托架链接固定,由此才不会发生攒动,在双C型臂X射线机的C型臂的回转托架结构设计中,通过增加浮动轴承组以及可调径向轴承的方式,使的C型臂腔侧面始终能够同浮动轴承组接触,保证稳定地位移到指定角度位置。这种结构的设计简化了双C型臂X射线机的零部件的同时,还确保双C型臂X射线机有较高的稳定性,保证在使用过程中能够获得最精准的立体图像。
2.3 驱动机构设计
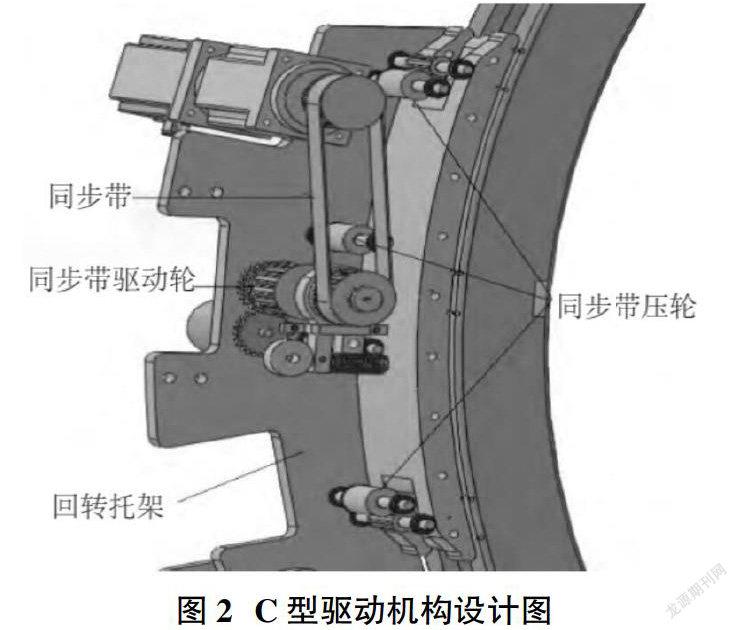
驱动机构是双C型臂X射线机的动力机构,主要由伺服电机、同步带驱动轮、同步带压轮组成。伺服电机同回转托架上的同步带轮固定在一起,通过后者驱动固定同步带上的C臂绕着圆弧展开旋转活动。另外还可以通过控制伺服电机驱动力输入速度的操作,确保大、小C型臂旋转速度以及旋转的方位信息是符合使用要求的,由此大大提高成像的精确性。驱动结构设计图如图2所示。
2.4 锁紧机构设计
锁紧机构是确保双C型臂X射线机固定在一个方位角度的重要机构,通过锁紧处理能够确保双C型臂X射线机的成像的稳定性和固定性。在本设计中,将锁紧机构安装在同步带驱动轮轴上,运用偏心轮同圆形卡箍之间形成锁紧的摩擦力。锁紧机构中的卡箍一端固定在设备主机上,另一端同偏心轮接触,在偏心轮上设置自锁装置,确保偏心机构所产生的正压力始终作用在圆形卡箍上,同步带驱动轮轴运动的时候带动圆形卡箍同步运作,两者之间会形成内圆切线方向的抹茶里,该摩擦力就会反作用到同步带驱动轮轴上,从而对偏心轮的形成起到调节作用。当偏心轮的形成越大所形成的摩擦力越大,锁紧机构发挥作用越明显。
3 双C型臂X射线机核心零部件设计与计算
确定好双C型臂X射线机各个结构之后,各种核心零部件设计需要严格按照设计原理,进行科学合理的计算,确保整机的结构参数是最协调可靠的。
3.1 轴承计算
双C型臂X射线机的轴承参數决定着大、小C型臂旋转运动的速度和效率。根据双C型臂X射线机的运行效率以及运动需求可知,该机械处于低速稳定运行状态下,因此轴承在C臂内腔运动时至少有四只轴承是需要同C臂产生接触运动的,此时大C臂的重量需要均匀地分配到这四只轴上,通过轴承的载荷情况以及表哥可知,e=0.26,求得X和Y的值分别为0.56,1.73。此时,计算Pr=XFr+YFa=0.56*500N+1.73*250=712.5N。再根据载荷的计算公式:C=(fh*fm*fd)/(fn*fr)*Pr。最后验证可知,轴承可以选用深沟球轴承的内径为20mm,外径为42mm,转速为300r/min,荷载为500N的型号规格。
3.2 同步带设计计算
同步带的设计是基于现有的C型臂生产方案,采用H型同步带。而大、小C型臂的同步带的功率大小不同,因此需要分开进行参数设计。首先是小C型臂的同步带功率设计。根据同步带功率计算公式:
Pd=KA*P求得功率大小为1.1kW。其带型大小根据功率大小而确定,可以采用节距为12.7mm的H带型。其次是在大C型臂的同步带的相关参数计算中,可以计算出大C臂的中心距为444.4mm,宽度大小为38.1mm。
3.3 C型臀接触应力计算
在本设计中,双C型臂X射线机的大、小C臂的直径较大,如大C臂可以达到1.8m以上,且大C臂的圆周角旋转角度可以高于180度。由于各种零部件参数都较大,在实际的运行工况中,轴承会对C型臂的内腔提供压力,两种零部件在不断的接触作用下可能会出现接触疲劳破坏。因此,在这种接触应力下就会导致整个双C型臂X射线机出现故障问题,影响使用寿命。展开对C型臂的接触应力的计算分析,可以有效地展开设备材料的改性分析,从而减少铝合金复合材料的使用变形量。目前可以采用综合弹性模量E的计算模式,实现对轴承同C型臂内腔的接触模型计算。
4 结束语
综上所述,结合现有的C型臂X射线机的使用现状可知,其存在成像延时性等不足,对此基于器械设计原则以及柔性化机器人设计理论,提出一种双C型臂X射线机的设计方案。在本设计方案下的双C型臂X射线机结构具有操作灵活性、成像准确性和全面性等优势,值得进一步推广应用。
参考文献:
[1]高波,李芳,孙德超,许宪龙.450kV和600kV高频X射线机的设计与应用[J].无损检测,2019,41(05):69-72.
[2]曾莹莹,陈海辉,肖化武,易荣喜.锂离子电池供电型便携式高频X射线机的研制[J].井冈山大学学报(自然科学版),2018,39(03):52-57.
[3]黄南概,黄景明,徐国华,何洪群.TRIZ理论技术矛盾的实践应用——便携式X射线机组合机头的分析与改进[J].科技创新导报,2018,15(08):90-91.
[4]孙瑞峰,张通化,管付银.双C型臂X射线机结构设计[J].装备制造技术,2017(07):124-126.
[5]张孝玲,王海亮.棒阳极微焦点X射线机在机匣焊接组合件检测中的应用[J].无损探伤,2016,40(05):25-28.
猜你喜欢
建材发展导向(2023年6期)2023-03-31 02:51:38
房地产导刊(2022年5期)2022-06-01 06:20:14
建材发展导向(2021年13期)2021-07-28 07:15:50
智富时代(2016年12期)2016-12-01 14:57:24
文艺生活·中旬刊(2016年10期)2016-11-04 04:44:49
戏剧之家(2016年10期)2016-06-18 12:31:11
科技视界(2016年13期)2016-06-13 08:03:44
专用汽车(2016年5期)2016-03-01 04:14:49
中国房地产业(2016年2期)2016-03-01 01:25:23
科技视界(2016年5期)2016-02-22 13:27:55