直驱混联式混合动力客车控制策略的开发与验证
2020-09-10 07:22赵瀚墨
内燃机与配件 2020年3期
赵瀚墨




摘要:混合动力汽车的推广是汽车工业在未来面临能源短缺和应对温室气体排放使全球气温升高的有效途径,本文针对某直驱混联式混合动力城市客车,开发了其整车能量管理策略,基于MATLAB/Simulink软件平台和AUTOSAR架构,搭建了整车控制软件模型,通过实车道路试验,验证了所开发的整车控制策略的有效性。
关键词:直驱混联式混合动力客车;整车控制策略;AUTOSAR架构;实车道路试验
0 引言
整车能量管理策略的开发是混合动力客车节能技术的关键。要保证车辆高效运行,须对整车工作模式进行合理划分,以使能量能在关键部件之间进行合理分配和流动。变速箱在车辆动力系统结构中,体积会影响到大扭矩的转递,其故障率直接关系到车辆的使用。目前国内有ISG插电式混合动力客车采用同轴直驱方式无变速箱结构,不仅结构优化,其整车策略可使油耗降低40%以上。与插电式混合动力客车不同的是本文发动机和TM电机同为主要驱动源,ISG为助力电机,使发动机工作在最优工作区,将整车工作模式根据蓄电池和车速及整车的需求不同而进行细分实现更合理的扭矩分配策略,使能量在动力源之间达到快速的平衡。
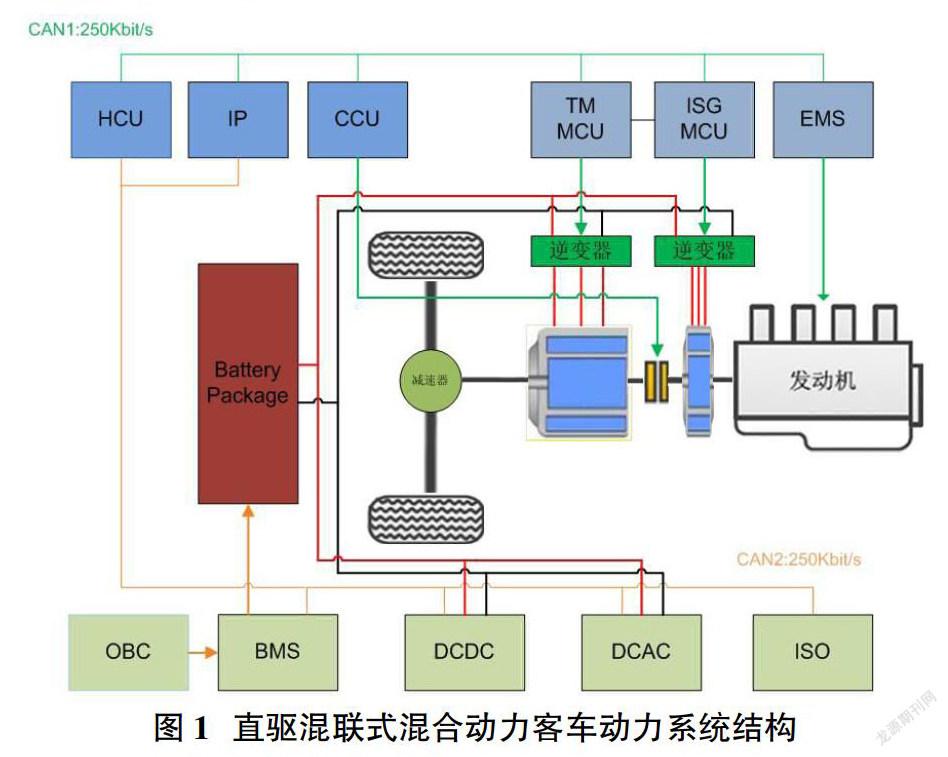
1 直驱混联式混合动力客车动力系统结构
混合动力客车动力系统采用P1+P2(P1/2)直驱混联结构方案,如图1所示,其结构特点为:驱动系统采用较小功率的发动机,没有变速箱;ISG电机转子与发动机曲轴直接相连,驱动电机空套在自动离合器的输出轴上,其输出与电机减速器的输入齿轮连接,并通过减速器的输出齿轮与发动机的输出相耦合[1]。采用电磁离合器(齿嵌式);并装配大容量动力电池。
2 整车控制策略开发
直驱混联式混合动力客车具有3个动力源,因此为了解决混合动力汽车多动力源所引起的模式切换和功率分配,需要引入整车控制系统对能量流进行合理的分配。以实现混合动力电动汽车要达到的目标。一般来说,整车控制策略应达到几个主要设计目标[2]:
①使燃油经济性最优;
②使排放最低;
③为了保持整车价格能够被市场接受,使驱动系统的成本最小化;
④实现以上三点的同时,保证整车的性能。
2.1 工作模式划分
车辆运行时,不同运行工况下由于外界环境及驾驶员需求的不同,动力系统零部件需要工作在不同的状态,为此将整车驱动工作模式划分为纯电动、串联和并联等工作模式,如图2所示,图中也标注了不同模式下的能量流动。
串联模式:如图2a,发动机和ISG电机可作为一个发电机组,来驱动TM电机发出扭矩使车辆行驶,能量流动路线为:发动机+ISG电机—TM电机—驱动轮。
纯电动模式1:如图2b,一般用处于汽车起步、低速等轻负载工况,且电池电量可以满足电机驱动需求时,使用纯电模式,能量流动路线为:蓄电池—TM电机—驱动轮。
纯电动模式2(ISG ON):如图2c,车辆处于起步,低速等轻负载工况时,且驾驶员需求超过TM单独驱动,需要启动ISG与TM共同驱动,此时BMS有充足的能量保证双电机工作;能量流动路线为:蓄电池—TM电机+ISG电机—驱动轮。
混合驱动模式:如图2d,车辆处于中负荷时,仅由蓄电池提供能量驱动车辆已不能满足需求,需要启动发动机,与TM电机共同提供转矩驱动车辆行驶能量流动路线为:蓄电池—TM电机—驱动轮+发动机—驱动轮。
全驱动模式:如图2e,车辆处于高负荷时,如果混合驱动不能满足当前驾驶员的驱动需求,在蓄电池电量容许下,蓄电池提供能量给ISG电机和TM电机驱动车轮,同时发动机工作在经济区提供驱动转矩,来满足车辆高负荷的要求。
驱动发电模式:如图2f,车辆处于高负荷时,如果混合驱动不能满足当前驾驶员的驱动需求,在蓄电池电量容许下,蓄电池提供能量给ISG电机和TM电机驱动车轮,同时发动机工作在经济区提供驱动转矩,来满足车辆高负荷的要求;能量流动路线为:发动机—驱动轮—发电机—蓄电池。
纯发动机模式:如图2g,此模式下当驾驶员的需求正好在发动机经济区域内,或者SOC过低不能给TM电机提供能量驱动车辆,可由发动机单独工作驱动车轮。此时的能量流动路线为:发动机—驱动轮。
制动能量回收模式:如图2h所示,混联式混合动力客车减速或制动时,只有电机输出负力矩,给蓄电池充电。这是混合动力汽车相对于传统汽车的一个比较大的优势,能量流动路线为:驱动轮—TM电机(发电机)—蓄电池组。
2.2 模式切换条件及切换过程
制定了整车工作模式之后,需要根据整车及零部件工作状态及系统输入如车速、动力电池SOC、踏板开度来判断系统应进入哪种工作模式,以便为不同模式下的扭矩分配奠定基础。(表1)
其中SOC1<SOC2<SOC3;V1<V2<V3<V4。
当蓄电池SOC低于SOC1时,低车速下对驱动力矩要求低,可在串联模式,发动机给蓄电池充电,当车速升高时,可退出串联如纯发动机驱动;
当蓄电池SOC处于(SOC1,SCO2)区间时,车速很低可考虑纯电TM驱动车辆,当车速升高,为了保护SOC以免迅速下降,可進入纯发动机工作模式,车速继续升高车辆进入混动模式,当车速升高至最大,则车辆进入全驱模式;
当蓄电池大于SOC3时,中低车速都可用纯电驱动,车速升高至中高车速时可以使用混合驱动和全驱,既能保证发动机工作在最优工作点,又能保证整车的高性能。
工作模式间的切换需要考虑离合器状态、发动机状态变化(包括发动机起动停机过程)。车辆起步可分为纯电、串联和并联等起步方式,其中串联和纯电起步时离合器是断开的,并联起步时离合器需要结合。发动机起动也有两种方法,一种是由ISG起动发动机,另一种方法由起动机起动,两种起动方式下离合器状态都是分离的,起动完成后保持离合器分离状态。
2.3 不同工作模式下扭矩分配及其实现
2.3.1 纯电动模式下的扭矩分配
为纯电动模式下驱动车轮的力矩由TM电机或TM电机加ISG一起提供,能量源为蓄电池。如图3所示,根据踏板解析出的需求力矩,如果需求扭矩不超过TM电机的最大能力,可由TM电机单独提供动力。车辆工作在纯电动TM单独驱动模式。如果需求扭矩已经超过了TM电机可以提供的最大能力,可以判断此时的需求扭矩是否小于TM电机和ISG电机的扭矩之和同时ISG有部分能力可带动发动机怠速工作,由于空调压缩机是需要发动机带动工作的,所以在ISG工作时要考虑到空调是否可以使能。此刻工作在纯电动ISG助力模式;如果不是,则需要TM电机和ISG电机共同驱动车辆。
2.3.2 并联模式下的扭矩分配
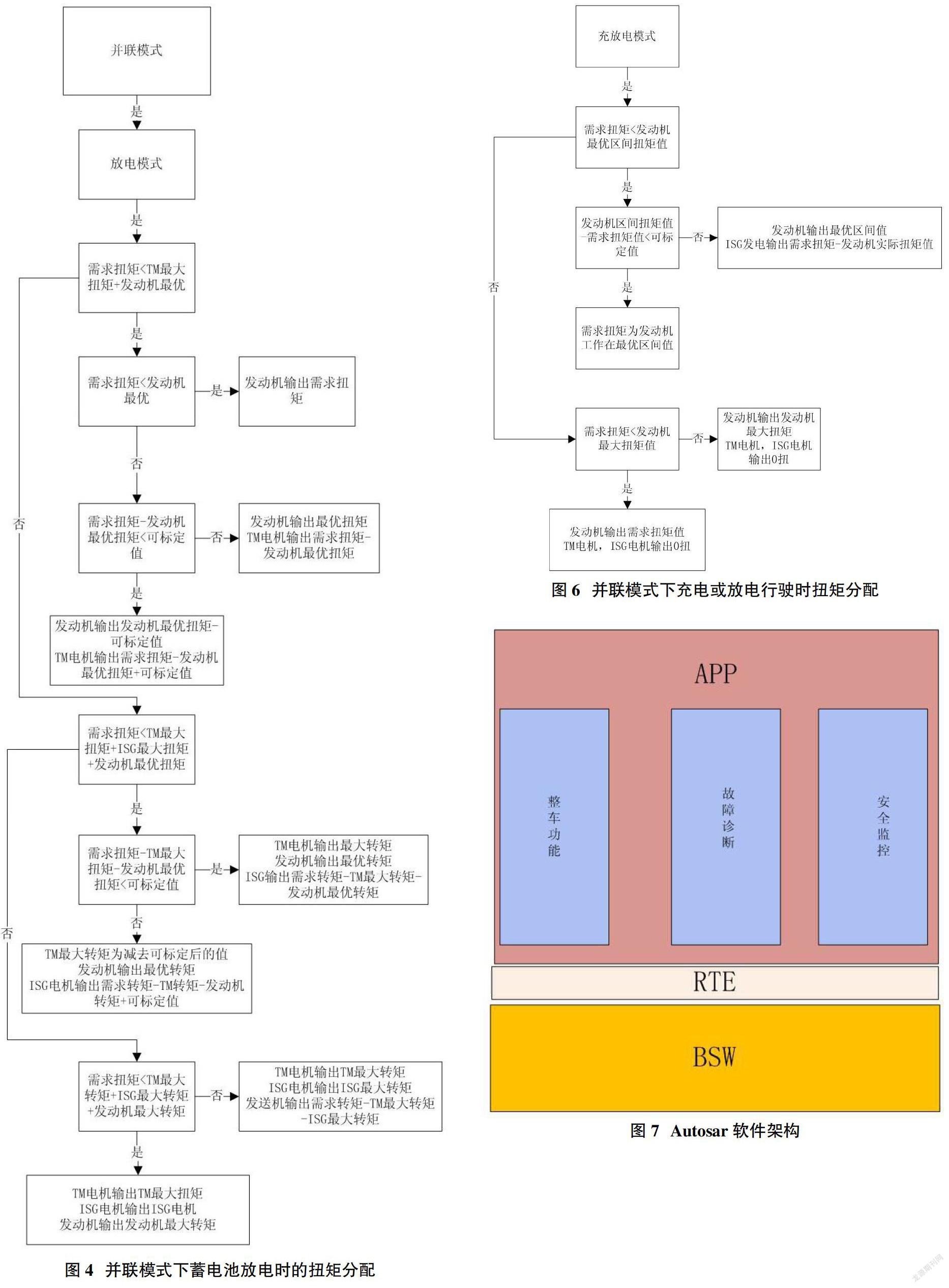
并联模式下,首要考虑到整车的燃油经济性和排放性能,保证发动机工作在最优区间。并联模式下包含了混合驱动模式即ISG不工作,发动机与TM驱动车辆,全驱动为ISG也和发动机,TM电机一起工作;纯发动机工作和驱动发电模式。在并联模式的扭矩分配原则里,根据扭矩需求与发动机扭矩,TM电机扭矩,ISG电机扭矩做比较,将这些模式划分为放电模式,充电模式,放电模式和充放电模式。
放电模式下的扭矩分配如图4所示,始终保持发动机工作在最优工作区间内部,调节TM电机扭矩及ISG电机扭矩满足需求扭矩以保持扭矩链的平衡。
充电模式下扭矩分配同样以发动机输出最优扭矩为基础,判断TM电机扭矩和ISG扭矩的负扭矩值,如图5所示。
充放电模式时,主要考虑发动机是否为了满足驾驶需求工作在最优工作区内,输出最优区间的扭矩值,降低整车的燃油经济性,其扭矩需求分配如图6所示。
3 基于Autosar软件架构的整车控制软件开发
基于Autosar架构的整车控制软件如图7所示,包括功能模块、故障诊断与安全监控等功能模块。通过运用Autosar软件架构实现子功能模块的逻辑算法,将整车基本功能、诊断功能及安全监控功能分别运用SWC实现[3],SWC中软件部件内部根据子功能划分为多个runnables,在BSW中的OS内部实现调度以符合ASPICE流程中的SWE2软件架构及SWE3的功能要求。
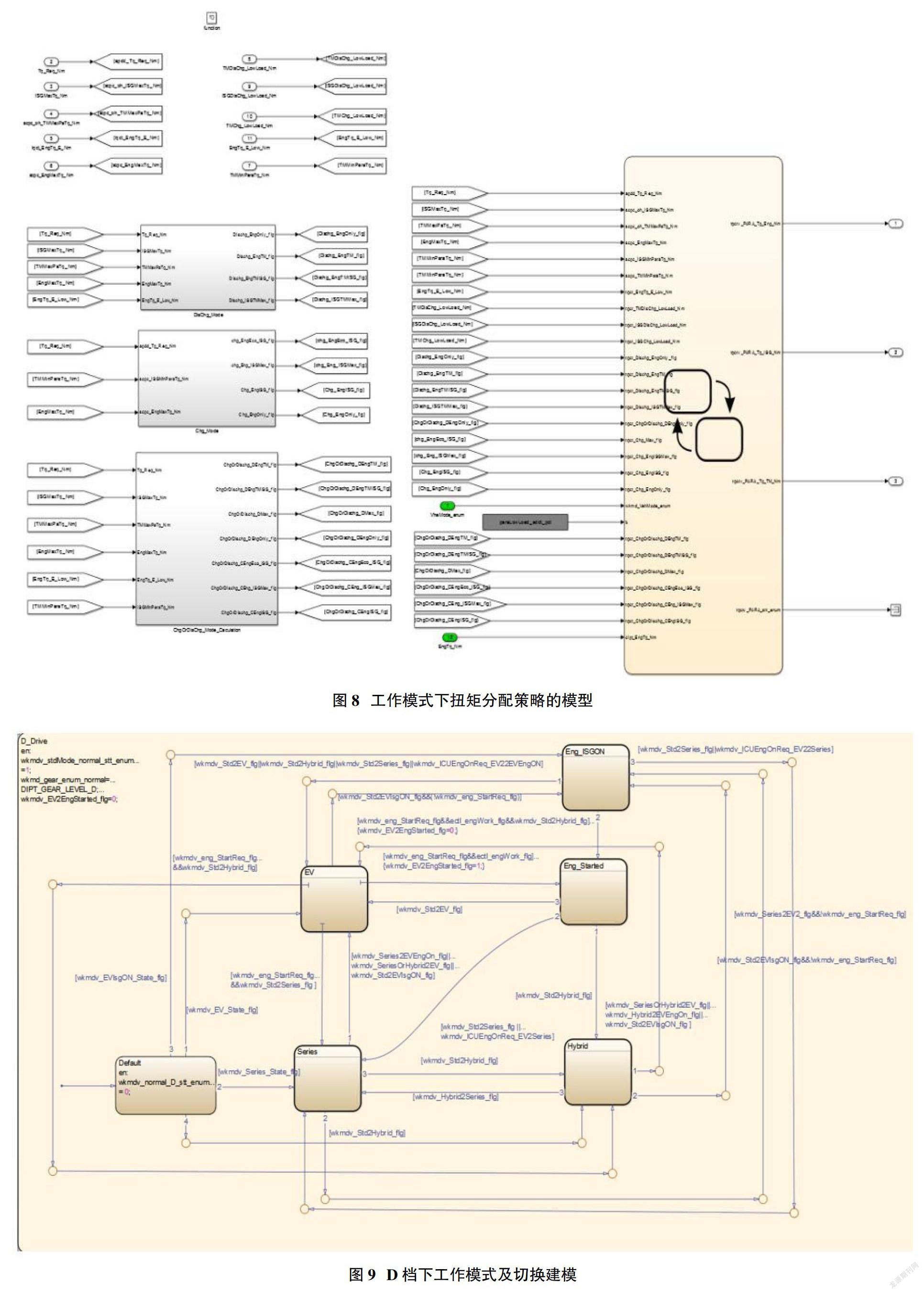
运用Matlab/Simulink进行不同模式下扭矩分配策略的建模实现,如图8所示。
由Stateflow实现工作模式的切换。在D档时整车的模式可分为纯电模式、纯电助力模式、串联模式和并联模式,每种模式的进入和退出条件主要考虑蓄电池SOC、车速和驾驶员的需求力矩,表1工作模式划分可作为参照条件。(图9)
4 控制策略实车验证
运用前文所开发的整车控制策略,对样车在在通州交通部试车场按照国家标准进行了中国典型城市公交工况的试验,整车控制器未出现任何故障。以下选取几个典型的工况来验证整车控制策略的有效性。
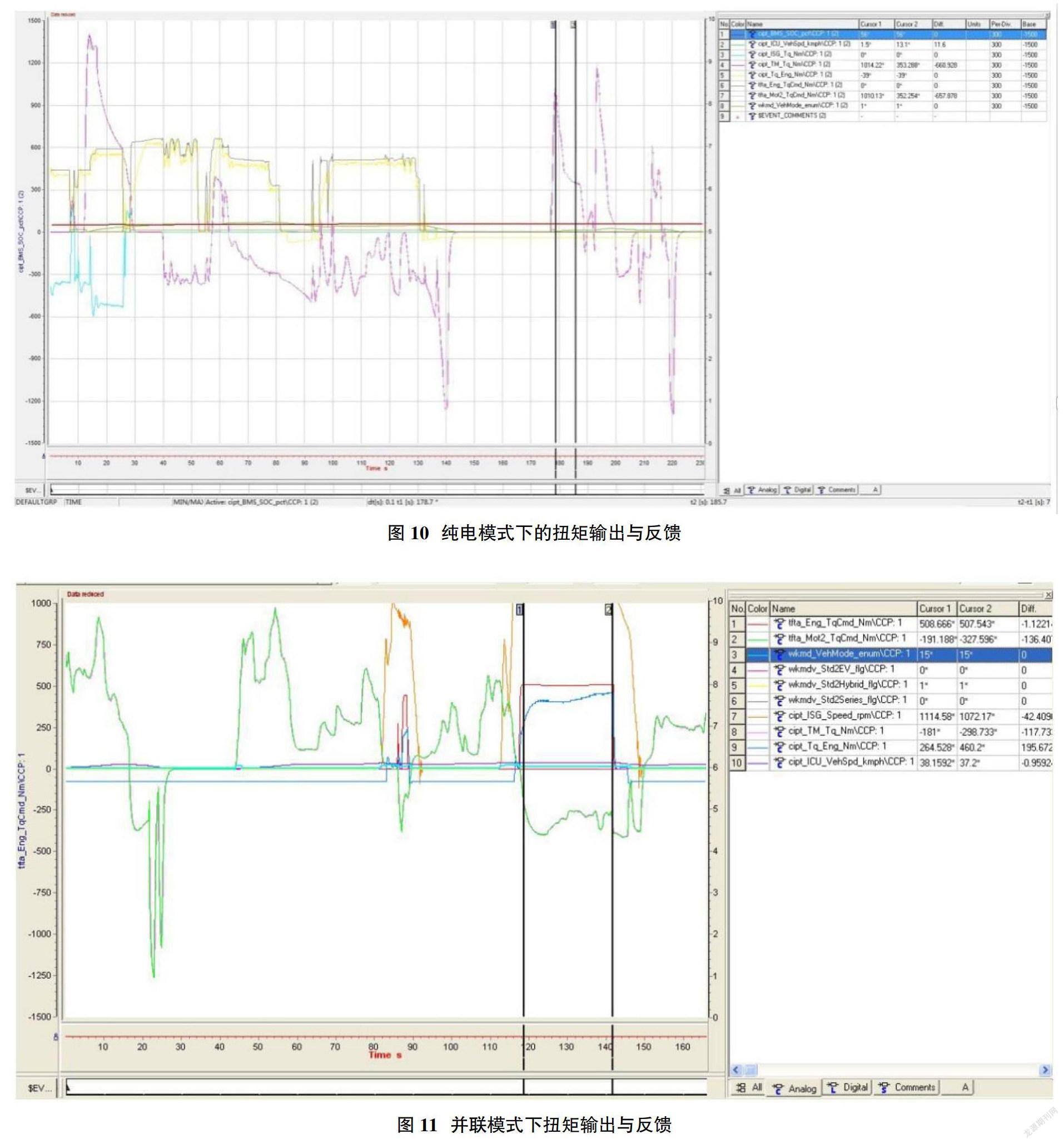
4.1 纯电动模式下测试结果及分析
如图10,纯电模式下的扭矩输出与反馈可以看出,在工作模式为单独由TM电机驱动车辆的纯电模式时,车辆车速为1-13km/h,稳态纯电动模式标志为1,发动机的摩擦力矩为-39N,ISG电机的扭矩为0,TM电机的输出扭矩与电机反馈的扭矩一致。此工况的工作条件与能量管理中工作模式划分的纯电动TM电机驱动的条件相吻合。
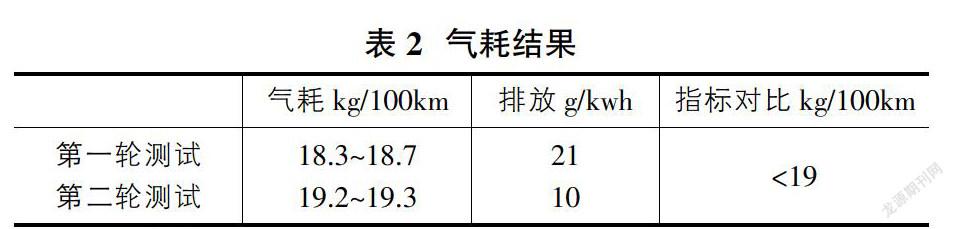
4.2 并联模式下结果及分析
图11为并联充放电模式下的实验数据,当工作模式为并联充放电模式时,发动机一部分扭矩用来驱动车辆,另一部分扭矩带动ISG电机给蓄电池充电,TM电机也输出负扭矩给蓄电池充电。由数据可以看出并联模式的标志为1,发动机的输出扭矩为508N,发动机的回馈扭矩为264N,剩余的用于带动ISG发电,TM电机的驱动扭矩为-191N,回馈扭矩为-181N。
4.3 能耗优化
在做城市公交工况测试时,第一轮测试结果气耗可以达标,但是排放较高,为了优化整车策略,将排放降下来。将发动机最优经济区的工作点由1000转提高到2000转后对工作模式的划分进行调整优化,主要是将SOC2与速度V3对应的工作模式由纯发动机驱动调整为发动机与TM电机共同驱动。第二轮测试结果气耗结果稍微增加了,但是排放下降较多。可以选用第二种方案作为整车控制策略,结果如表2所示。
5 结论
针对某直驱混联式混合动力城市客车,开发了其整车能量管理策略,基于MATLAB/Simulink软件平台和AUTOSAR架构,搭建了整车控制软件模型,并进行了实车验证,验证结果表明,整车的排放较高,将整车控制策略的发动机最优工作区及工作模式条件调整后,经过测试得到虽然气耗有一点超标,但是排放下降很多,不仅验证了整车策略还优化了整车的排放性能。
參考文献:
[1]王磊,张勇,殷承良.混联式混合动力客车整车控制系统的开发术[J].上海:汽车工程,2012.
[2]SCHOUTEN J,SALMAN A.A Fuzzy Logic Control for Parallel Hybrid Vehicles[J]. IEEE Transactions on Control Systems Technology,2002,10(3):460-468.
[3]陈海兰.基于AUTOSAR规范的嵌入式实时操作系统设计与实现[D].上海:复旦大学,2013.