
地下无轨采矿装备智能避障技术和方法研究
2020-09-10 07:22战凯余乐文张达张元生
黄金 2020年9期
战凯 余乐文 张达 张元生



摘要:在分析现有无轨采矿装备避障技术基础上,开发了三维避障探测系统,提出了一种基于三维环境探测的地下矿山无轨采矿装备智能避障预警方法。介绍了该技术的背景,建立巷道探测模型,包括横向距离和纵向距离判断方法。将该方法应用于铲运机,证明了该方法在无人铲运机上的有效性和广阔的应用前景。
关键词:地下开采;智能避障;无轨采矿装备;三维避障探测系统;分级预警;雷达
中图分类号:TD679 文章编号:1001-1277(2020)09-0077-04
文献标志码:Adoi:10.11792/hj20200912
引 言
随着矿业领域向智能化、无人化方向的发展进程不断加快,发展智能采矿技术与装备成为矿山行业的必经之路。采矿装备的智能化是智能采矿的前提,“十二五”期间,由北京矿冶研究总院牵头组织实施的国家高技术研究发展计划(863计划)主题项目“地下金属矿智能开采技术”,开发了智能铲运机、智能装药车、智能矿用汽车、智能凿岩台车、智能潜孔钻机等智能采矿装备,攻克了采矿装备的自主定位与导航、路径规划与避障、自主行驶等核心技术,大幅推进了国内智能采矿装备的发展[1-2]。
智能避障是实现无轨采矿装备无人驾驶的关键技术,是提升地下无轨采矿装备安全高效作业水平的核心,大力开发智能避障技术具有迫切需求和重要意义。国外无轨装备避障技术研究起步较早,山特维克公司开发的AutoMine系统、Optimine矿山信息化管理系统已成为数字化开采的典范。国内起步较晚,露天矿山设备避障技术研究者较多。韦海良等[3]在分析各种防碰撞技术基础上,研制了基于24G多普勒效应的毫米波雷达防撞系统,阐述了相关技术原理、系统组成与功能,开展了不同天气、不同道路和车辆不同方向等条件下试验。李鑫等[4]在分析防碰撞系统需求的基础上提出需要采集的物理量,设计了基于卫星定位和角运动测算的露天矿卡车防碰撞系统,但该系统无法判别高度信息,容易引起相邻梯度行驶卡车报警信号的误报,定位精度只能到米级。史海平[5]通过对露天矿安全生产现状分析,设计了基于GPS技术的卡车防碰撞预警系统,为卡车防碰撞提供及时、全方位的预警,但GPS系统容易受卫星状态的影响。杨志勇[6]开展防碰撞预警技术在GPS卡车调度系统中的应用研究,实现资源的整合与共享。武先利等[7]基于双频RF近距离自组网稳定通信、复杂环境视频采集显示、GPRS数据通信等关键技术,研制出了高度集成的露天矿车辆防碰撞与调度系统,实现多位一体的车辆间防碰撞预警。卢云峰[8]研制了露天矿卡车安防预警预控集成终端,实现了卡车安防预警、人员安防预警、毫米波雷达防碰撞自动刹车等六合一功能,使露天矿卡车安防预警预控管理上升到一个新的台阶。然而地下矿山无法接收GPS信号,露天矿用卡车防碰撞技术无法在地下矿山应用,矿冶科技集团有限公司、北京科技大学开发了基于UWB-Laser无轨装备定位导航系统[9-12],通过二维激光雷达预警系统,判断设备与巷道距离进行预警,实现了无轨装备避障,但預警阈值设置过大,行驶过程中经常报警,行驶效率低;如果预警阈值设置过小,遇到紧急情况无法提前预警,安全性差。因此,本文提出一种基于三维环境探测的地下矿山无轨采矿装备智能避障预警方法,提高采矿装备避障检测准确性,大幅降低地下无轨装备作业的事故风险。
1 三维避障探测系统
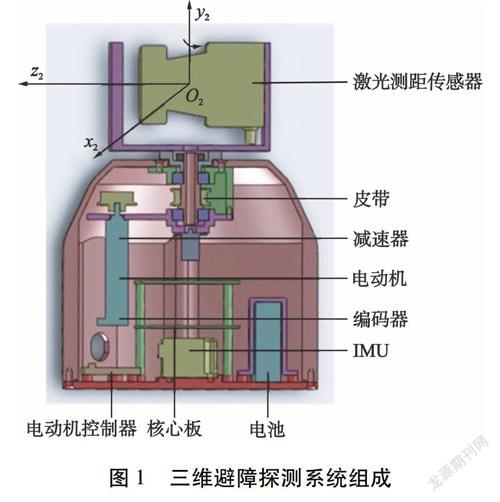
三维避障探测系统的硬件主要包括核心板、陀螺仪、激光测距传感器、电动机、减速机构、编码器和电动机控制器、无线路由器、电池等部分(见图1)。
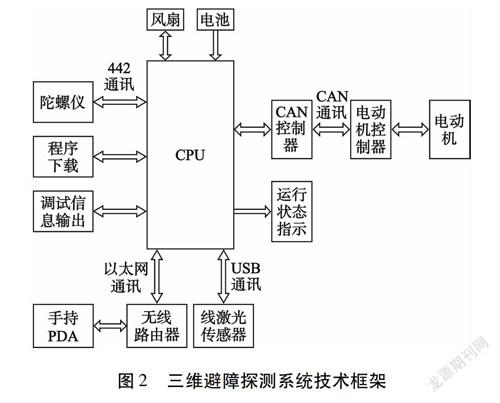
通过电动机带动二维激光测距传感器旋转,实现巷道轮廓三维感知,CPU通过USB接口采集线激光的数据,同时控制电动机的运行;陀螺仪获取的方位信息与线激光采集的点数据实时匹配,再通过以太网接口,由无线路由器发送给手持PDA进行解算,技术框架见图2。
2 智能避障技术研究
2.1 巷道探测模型建立
首先将巷道环境按视角划分为6个区域(上下前后左右),每个区域拥有90°的视角,保证空间无缝不重叠覆盖(见图3),在每个视角范围内统计占据概率地图的分布。根据分布计算可朝该方向前进的权值,选取权值最大的方位执行前进;当权值都小于一定值时判定为无可移动方向,禁止该向移动。具体权值计算考虑如下因素:
1)避障指数Z,视角中一定范围内(如1.5 m)有障碍物点,判为存在障碍物,禁止该向移动。
2)运行惯性I,包括由无轨装备本身动力学特征和驾驶者造成的固定距离,也要包括由于速度不同造成的可变距离。
3)空间深度D,优先向空间更宽旷的方向移动。视角内综合深度越大,该向移动权值越大,反之越小。
综合考虑以上3个因素,通过具体场景测试确定各项因素值的权重。
2.2 巷道避障技术
为了实现无轨采矿装备避障,需要在无轨装备上安装三维避障探测系统,利用激光雷达采集巷道的三维信息,从而构建地下巷道三维感知形态,通过巷道探测模型评估无轨装备与障碍物或巷道壁的距离,实现避障预警。
巷道三维检测信息是无轨装备安全行驶的重要判断依据,为了准确评估无轨装备安全行驶趋势,将巷道三维空间模型简化投影到平面上,通过二维平面距离开展预警评估。将激光雷达扫描得到的直线距离转化为检测点的二维坐标信息。在平面坐标系中,为了得到检测点的二维坐标信息,需要将直线距离值转换为测量点与激光雷达之间的横向距离和纵向距离。
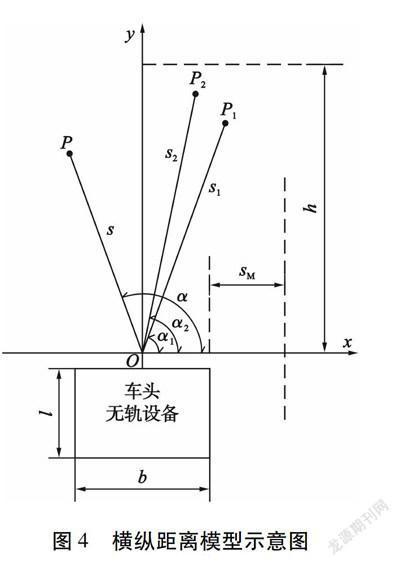
横纵距离模型见图4。已知无轨装备宽b,长l,扫描点P与激光雷达之间的距离s和横向安全距离sM,扫描点P与x轴之间夹角α;扫描点P1与激光雷达之间的距离s1,与x轴夹角α1;扫描点P2与激光雷达之间的距离s2,与x轴夹角α2;h为有效探测距离。
1)避障指数Z评估。将激光雷达检测到的数据信息(障碍点信息)转换成坐标点,障碍点Pi的坐标信息为(xi,yi)。
2)运行惯性I评估。为了保证无轨装备在巷道环境中运行的安全性,运行惯性I要包括由无轨装备本身动力学特征和驾驶者造成的固定距离,也要包括由于速度不同造成的可变距离,计算公式为:
I可以根据复杂度不同的巷道环境做相应调整。
3)空间深度D评估。通过建立横向距离和纵向距离判断模型,识别不同的视角、车宽等条件下综合深度权值D。根据测量点与激光雷达之间的横向距离和纵向距离信息,建立无轨装备的横纵距离模型。距离判断模型提供的不同的判断条件,会直接影响无轨装备避障系统的输出结果,进而影响下一步行驶动作的判断。sM为横向安全距离,其限定无轨装备与巷道墙壁的最小间距,激光雷达与巷道墙壁之间的最小安全距离为b/2+sM;通过对扫描点横向距离与最小安全距离的比较,并辅助纵向距离比较,将危险状态分为3个等级:绿色安全等级、黄色提醒等级和红色警示等级。
(1)绿色安全等级。满足式|scos α|≥b/2+sM,则表示有效探测区域内所有扫描点均在无轨装备前方的直线行驶敏感区域以外,由此可判断在当前的巷道环境中,车辆可保持前车架方向不变,快速直线行驶。
(2)黄色提醒等级。满足式|scos α|<b/2+sM,则表示无轨装备正前方的直线行驶敏感区域内存在扫描点,表明巷道出现了方向改变或有障碍物存在,这种情况是最复杂且难以判断的。为了更准确地判断当前车辆所处的巷道环境信息,通过上式筛选出落在无轨装备直线行驶敏感区域内的扫描点;如果这些扫描点满足辅助判断条件①:α1-α2≤5°,则判定无轨装备前方出现的巷道出现了方向改变,要将危险状态等级提升至黄色提醒等级,提醒驾驶者注意前方巷道情况。如果不满足辅助判断条件①,则利用辅助判断条件②:‖s1sin α1-s2sin α2‖≥l/2,判断这些扫描点之间的纵向距离,如果满足辅助判断条件②,则说明车辆前方的巷道环境出现了曲线型方向改变或是巷道两侧出现障碍物,并且它们之间的纵向距离可以允许车辆改变角度通过此处,要将危险状态等级提升至黄色提醒等级,提醒驾驶者注意前方巷道情况。
(3)红色警示等级。如果无轨装备前方的直线行驶敏感区域内的扫描点不能通过黄色提醒等级中的判断条件做出明确判断,则要将危险状态等级提升至红色警示等级。红色警示等级中的主要判断公式和黄色提醒等级中的相同,即scos α<b/2+sM,目的是筛选出落在无轨装备直线行驶敏感区域内的扫描点,再通过3个辅助判断条件继续判断;如果扫描点满足辅助判断条件①:α1-α2>5°,则表明扫描点在无轨装备前方的直线行驶敏感区域内分布不连续;如果扫描点满足辅助判断条件②:‖s1sin α1-s2sin α2‖<l/2和辅助判断条件③:‖s1cos α1-s2cos α2‖<b+2sM,则表示这些扫描点之间的纵向距离和横向距离都无法满足无轨装备安全的通过,从而将危险状态等级提升至红色警示等级。
3 现场工业试验
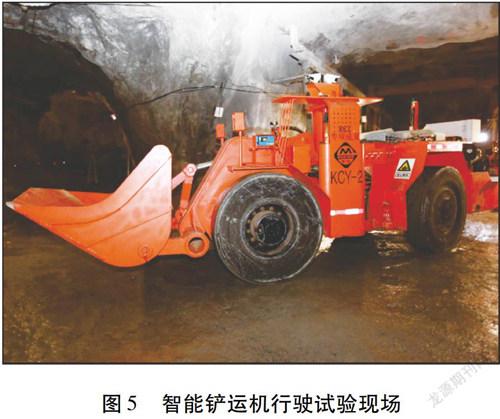
无轨装备智能避障技术方法应用于地下巷道的智能铲运机自主行驶,试验场地为深圳市中金岭南有色金属股份有限公司凡口铅锌矿-240 m中段的主斜坡道,试验场地见图5。
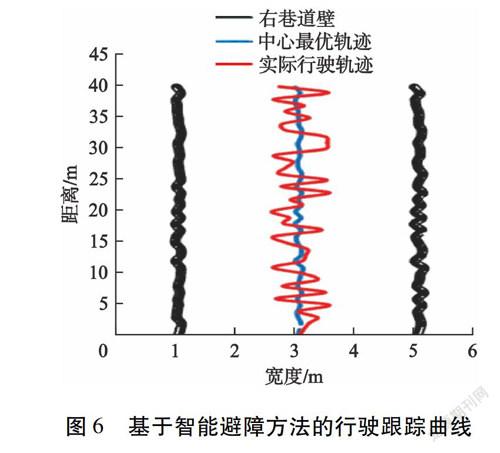
在地下巷道的自主行驶试验中,铲运机采用三级预警智能避障技术与方法,最终行驶以直线加曲线为主,试验跟踪效果见图6。试验结果表明,本文提出的智能避障技术可为无轨装备安全行驶提供准确数据支撑。
4 结 语
本文提出了一种无轨采矿装备智能避障技术方法,通过对无轨装备进行多区段分级预警,有效约束装备行驶路径,避免无轨装备在行驶过程中互相碰撞及撞人事故,并得到了试验验证。基于三维环境探测的地下矿山无轨采矿装备智能避障预警方法可有效降低无轨装备作业的事故风险,提升无轨装备的智能化程度,有效降低碰撞事故发生的概率,提升矿山安全生产水平,具有推广应用价值。
[参 考 文 献]
[1] 马飞,杨皞屾,顾青,等.基于改进A*算法的地下无人铲运机导航路径规划[J].农业机械学报,2015,46(7):303-309.
[2] 张元生,战凯,马朝阳,等.智能矿山技术架构与建设思路[J].有色金属(矿山部分),2020,72(3):1-6.
[3] 韋海良,郭安斌,董文斌,等.矿用卡车毫米波雷达防碰撞系统的研究与应用[J].煤矿安全,2015,46(增刊1):43-47.
[4] 李鑫,尚涛,周伟,等.基于卫星定位和角运动测算的露天矿卡车防碰撞系统设计[J].煤矿机械,2015,36(1):1-2.
[5] 史海平.基于GPS的卡车防碰撞预警系统在露天矿的应用[J].露天采矿技术,2016,31(7):75-78.
[6] 杨志勇.防碰撞预警技术在GPS卡车调度系统中的应用[J].煤炭科学技术,2018,46(增刊1):161-163.
[7] 武先利,温良,鲜希,等.露天矿车辆防碰撞调度系统研究[J].煤炭科学技术,2015,43(5):87-90,117.
[8] 卢云峰.露天矿卡车安防预警预控集成终端的研制[J].中国矿业,2017,26(增刊1):407-410,414.
[9] 石峰,顾洪枢,战凯,等.地下铲运机自主行驶与避障控制方法研究[J].有色金属(矿山部分),2015,67(5):68-75.
[10] 李建国,战凯,石峰,等.基于最优轨迹跟踪的地下铲运机无人驾驶技术[J].农业机械学报,2015,46(12):323-328.
[11] 孟宇,肖小凤,赵坤.基于UWB 的地下定位算法和拓扑优化[J].工程科学学报,2018,40(6):743-753.
[12] 陆博,周俊武,赵建军.基于UWB系统的井下车辆高精度定位研究[J].有色金属(矿山部分),2015,67(6):57-60.
Research on intelligent obstacle avoidance technology
and method for underground trackless mining equipment
Zhan Kai1,2,3,Yu Lewen1,2,3,Zhang Da1,3,Zhang Yuansheng1,3
(1.BGRIMM Technology Group; 2.School of Mechanical Engineering,University of Science and Technology Beijing;
3.Beijing Key Laboratory of Nonferrous Intelligent Mining Technology)
Abstract:The three-dimensional obstacle avoidance and detection system is developed based on the analysis of the existing obstacle avoidance technology for trackless equipment.An intelligent obstacle avoidance and early warning method for trackless mining equipment in underground mine based on three-dimensional environment detection is proposed.The background of the technology is introduced and the roadway detection model is established,including the methods for transverse distance and longitudinal distance judgment.The method is applied to a LHD and the results show that the method has effectiveness and wide application prospects for unmanned LHD.
Keywords:underground mining;intelligent obstacle avoidance;trackless equipment;three-dimensional obstacle avoidance and detection system;graded early warning;radar
收稿日期:2020-08-10; 修回日期:2020-08-20
基金項目:“十三五”国家重点研发计划项目(2018YFC0604400)
作者简介:战 凯(1962—),男,吉林长春人,研究员,博士,从事金属矿山智能装备、智能矿山研究工作;主持的重大项目有国家863计划“十一五”“十二五”主题项目“地下金属矿智能开采技术”和“十三五”国家重点研发计划“地下金属矿规模化无人采矿关键技术研发与示范”;获得的重大奖项有省部级科技奖10余项,专利24项等;北京市南四环西路总部基地18区23号楼,矿冶科技集团有限公司,100160;E-mail:zhankai@bgrimm.com
猜你喜欢
黄金(2021年2期)2021-09-10
汽车观察(2021年8期)2021-09-01
电子乐园·上旬刊(2021年8期)2021-05-16
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
装备维修技术(2020年20期)2020-03-25
科学与财富(2017年22期)2017-09-10
科学与财富(2017年22期)2017-09-10
科技创新与应用(2017年15期)2017-05-31
地震研究(2016年1期)2016-07-04
